基于Arduino的超声波智能避障小车
依赖库下载:
Servo
依赖库的安装方法,如不清楚,可以参考官方文档《安装其他的Arduino库》
实物图: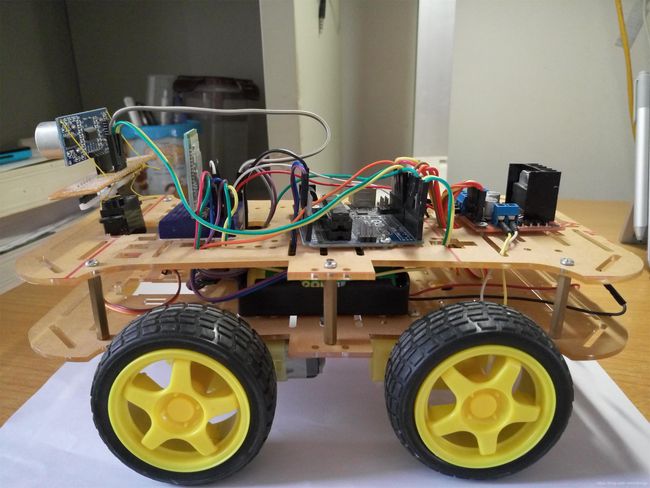
程序如下:
#include