深度学习优化策略---炼丹trick之正确使用BN(训练和测试/预测时怎么用)
【深度学习】深入理解Batch Normalization批标准化
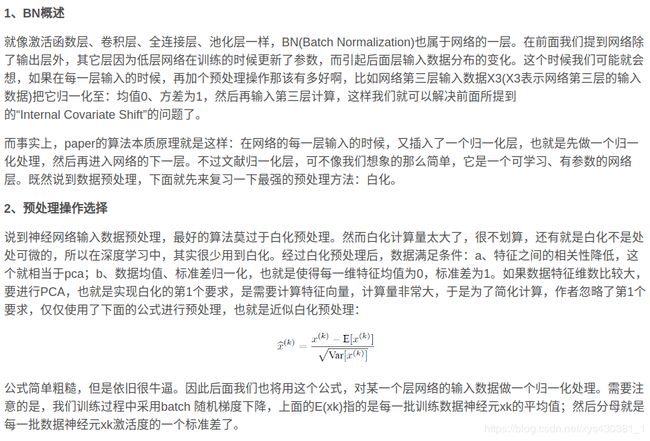
一、为什么需要batch normalization
尽管梯度下降法训练神经网络很简单高效,但是需要人为地去选择参数,比如学习率,参数初始化,权重衰减系数,Dropout比例等,而且这些参数的选择对于训练结果至关重要,以至于我们很多时间都浪费到这些调参上。BN算法的强大之处在下面几个方面:
- 可以选择较大的学习率,使得训练速度增长很快,具有快速收敛性。
- 可以不去理会Dropout,L2正则项参数的选择,如果选择使用BN,甚至可以去掉这两项。
- 去掉局部响应归一化层(LRN)。(AlexNet中使用的方法,BN层出来之后这个就不再用了)
- 可以把训练数据打乱,防止每批训练的时候,某一个样本被经常挑选到。(不是很理解啊)
首先来说归一化的问题,神经网络训练开始前,都要对数据做一个归一化处理,归一化有很多好处,原因是网络学习的过程的本质就是学习数据分布,一旦训练数据和测试数据的分布不同,那么网络的泛化能力就会大大降低,另外一方面,每一批次的数据分布如果不相同的话,那么网络就要在每次迭代的时候都去适应不同的分布,这样会大大降低网络的训练速度,这也就是为什么要对数据做一个归一化预处理的原因。另外对图片进行归一化处理还可以处理光照,对比度等影响。
网络一旦训练起来,参数就要发生更新,出了输入层的数据外,其它层的数据分布是一直发生变化的,因为在训练的时候,网络参数的变化就会导致后面输入数据的分布变化,比如第二层输入,是由输入数据和第一层参数得到的,而第一层的参数随着训练一直变化,势必会引起第二层输入分布的改变,把这种改变称之为:Internal Covariate Shift,BN就是为了解决这个问题的。
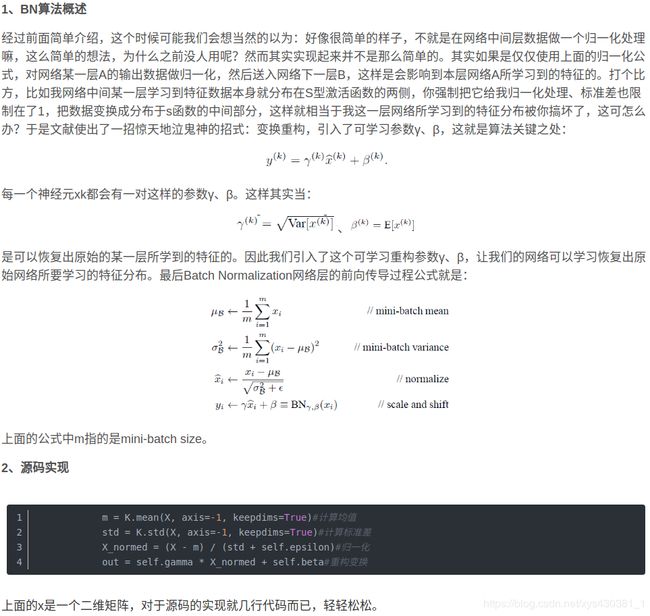
二、BN基本原理
三、BN算法实现
3、BN与激活函数的结合
根据文献说,BN可以应用于一个神经网络的任何神经元上。
按照原文第一章的理论,应当在每一层的激活函数之后(例如ReLU=max(Wx+b,0)之后),对数据进行归一化。然而,文章中说这样做在训练初期,分界面还在剧烈变化时,计算出的参数不稳定,所以退而求其次,在Wx+b之后进行归一化。因为初始的W是从标准高斯分布中采样得到的,而W中元素的数量远大于x,Wx+b每维的均值本身就接近0、方差接近1,所以在Wx+b后使用Batch Normalization能得到更稳定的结果。
文献主要是把BN变换,置于网络激活函数层的前面。在没有采用BN的时候,激活函数层是这样的:
z=g(Wu+b)
也就是我们希望一个激活函数,比如s型函数s(x)的自变量x是经过BN处理后的结果。因此前向传导的计算公式就应该是:
z=g(BN(Wu+b))
其实因为偏置参数b经过BN层后其实是没有用的,最后也会被均值归一化,当然BN层后面还有个β参数作为偏置项,所以b这个参数就可以不用了。因此最后把BN层+激活函数层就变成了:
z=g(BN(Wu))
四 实际使用(测试与预测)
可能学完了上面的算法,你只是知道它的一个训练过程,一个网络一旦训练完了,就没有了min-batch这个概念了。测试阶段我们一般只输入一个测试样本,看看结果而已。
因此**测试样本前向传导的时候,上面的均值u、标准差σ 要哪里来?**其实网络一旦训练完毕,参数都是固定的,这个时候即使是每批训练样本进入网络,那么BN层计算的均值u、和标准差都是固定不变的。我们可以采用这些训练阶段的均值u、标准差σ来作为测试样本所需要的均值、标准差,于是最后测试阶段的u和σ 计算公式如下:
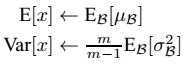
上面简单理解就是:对于均值来说直接计算所有batch u值的平均值;然后对于标准偏差采用每个batch σB的无偏估计。最后测试阶段,BN的使用公式就是:
![]()
也就是说, 在test的时候,BN用的是固定的mean和var, 而这个固定的mean和var是通过训练过程中对mean和var进行移动平均得到的,被称之为moving_mean和moving_var。
在实际操作中,每次训练时应当更新一下moving_mean和moving_var,然后把BN层的这些参数保存下来,留作测试和预测时使用。
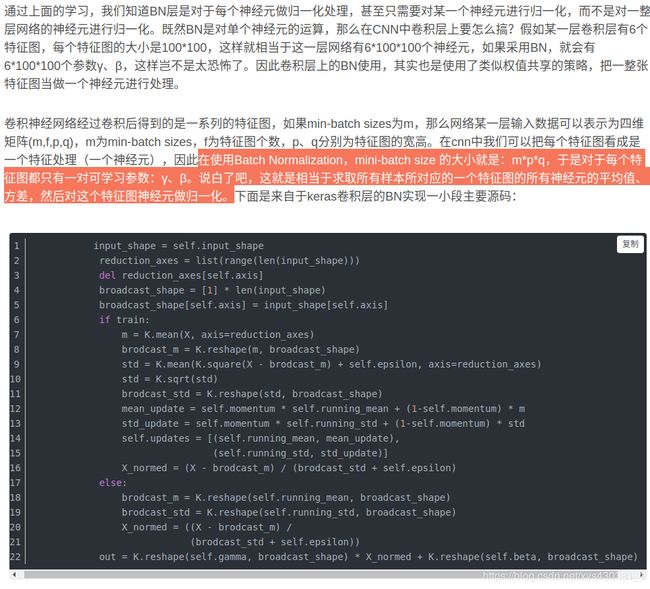
五、BN在CNN中的应用
示意图与伪代码
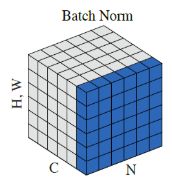
对于同一batch的input,假设输入大小为[batch_num, height, width, channel],逐channel地计算同一batch中所有数据的mean和variance,再对input使用mean和variance进行归一化,最后的输出再进行线性平移,得到batch_norm的最终结果。伪代码如下:
for i in range(channel):
x = input[:,:,:,i]
mean = mean(x)
variance = variance(x)
x = (x - mean) / sqrt(variance)
x = scale * x + offset
input[:,:,:,i] = x
具体说明
因为batch_norm 在test的时候,用的是固定的mean和var, 而这个固定的mean和var是通过训练过程中对mean和var进行移动平均得到的。而直接使用train_op会使得模型没有计算mean和var,因此正确的方式是:
每次训练时应当更新一下moving_mean和moving_var
那如果在预测时is_traning=false呢,但BN层的参数没有从训练中保存,那使用的就是随机初始化的参数,结果不堪想象。所以需要在训练时把BN层的参数保存下来,然后在预测时加载.
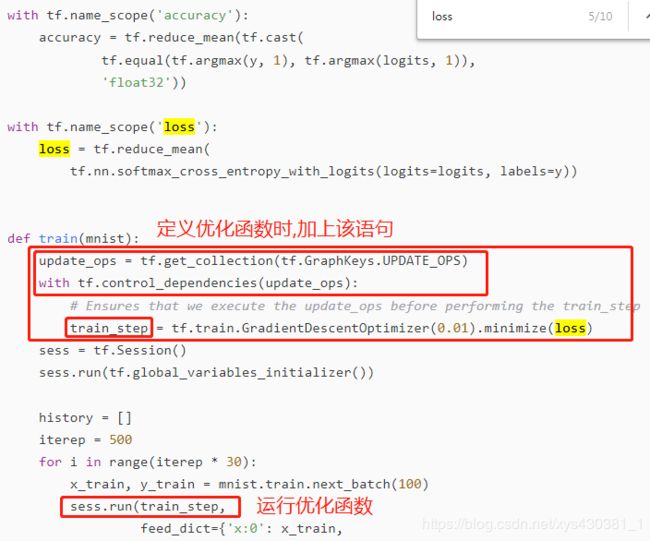
六、tensorflow 中batch_normalization的正确使用姿势
tf.layers.batch_normalization()
BN在如今的CNN结果中已经普遍应用,在tensorflow中可以通过tf.layers.batch_normalization()这个op来使用BN。该op隐藏了对BN的mean var alpha beta参数的显示申明,因此在训练和部署测试中需要特征注意正确使用BN的姿势。
http://www.cnblogs.com/hrlnw/p/7227447.html

说明:
1、需要在来训练中添加update_ops以便在每一次训练完后及时更新BN的参数。
#tf.GraphKeys.UPDATE_OPS : batch_norm中的moving_mean and moving_variance的更新操作(滑动平均)
2、预测时,需要正确读取BN的参数
与保存类似,读的时候变量也需要为global_variables。如下:
saver = tf.train.Saver()
or saver = tf.train.Saver(tf.global_variables())
saver.restore(sess, ‘here_is_your_personal_model_path’)
PS:预测时还需要把tf.layers.batch_normalization(x, training=is_training,name=scope) 这里的training设为False
https://blog.csdn.net/GAN_player/article/details/77484285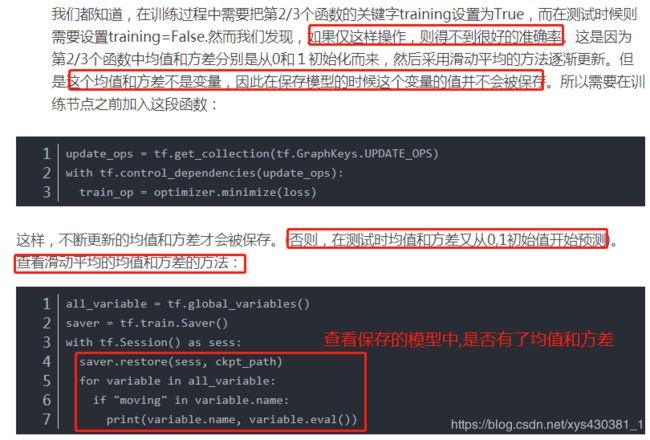
tf.contrib.layers.batch_norm
https://blog.csdn.net/qq_30638831/article/details/82877109
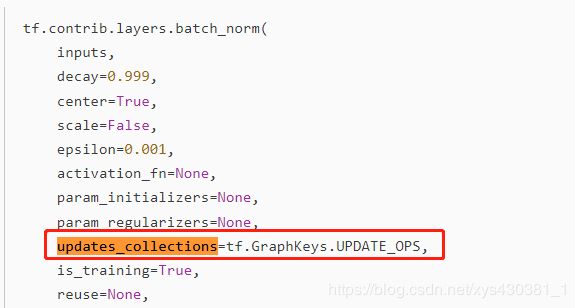

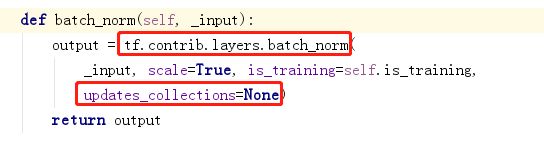
tf.contrib.layers.batch_norm实际代码中的使用
可以将updates_collections = None设置为强制更新,但可能会导致速度损失,尤其是在分布式设置中。
事实上,在DenseNet的实现代码中,都是用的这种方式(updates_collections = None)。

在这两份源代码中,使用batch_norm都是这种方式,而且在整个代码中都找不到如下的关键字:
update_ops = tf.get_collection(tf.GraphKeys.UPDATE_OPS)
with tf.control_dependencies(update_ops)
源代码请参考:
https://github.com/LaurentMazare/deep-models/tree/master/densenet
https://github.com/ikhlestov/vision_networks
七、BN代码实例与效果分析
链接:https://www.jianshu.com/p/ff3768730fb0
这里构建了两个神经神经网络,唯一的区别就是一个进行了BN操作而另外一个没有。
#BN for the first layer input
if self.norm:
fc_mean,fc_var = tf.nn.moments(self.xs,axes=[0])
scale = tf.Variable(tf.ones([1]))
shift = tf.Variable(tf.zeros([1]))
epsilon = 0.001
self.xs = tf.nn.batch_normalization(self.xs,fc_mean,fc_var,shift,scale,epsilon)
接下来是对整个隐层中的处理
def add_layer(self,inputs,in_size,out_size,activation_function=None,norm = False):
# add layer
Weights = tf.Variable(tf.random_normal([in_size,out_size],mean = 0 ,stddev =1))
biases = tf.Variable(tf.zeros([1,out_size])+0.1)
Wx_plus_b = tf.matmul(inputs,Weights) + biases
if norm:
#compute mean,variance according to the axes
fc_mean,fc_var = tf.nn.moments(
Wx_plus_b,
axes=[0],
)
scale = tf.Variable(tf.ones([out_size]))
shift = tf.Variable(tf.zeros([out_size]))
epsilon = 0.001 # a smooth value, avoid the value of denominator is zero
Wx_plus_b = tf.nn.batch_normalization(Wx_plus_b,fc_mean,fc_var,shift,scale,epsilon)
接下来将两个网络模型的作用进行了可视化处理。
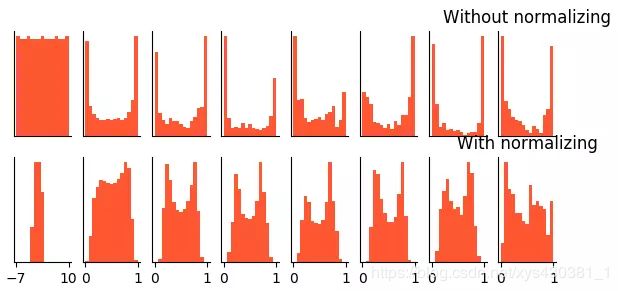
分析上图,初始输入的分布服从均匀分布,可以看出在接收输入时,无BN的模型的输入刚好满足这个分布,但是有BN的模型已经将均匀分布的数据做了标准化处理。可以看出在没有BN的情况下,数据很快就到了激活函数(sigmoid)的饱和区域。但是经过BN处理后,数据中很大一部分处在里激活函数的非饱和区域。
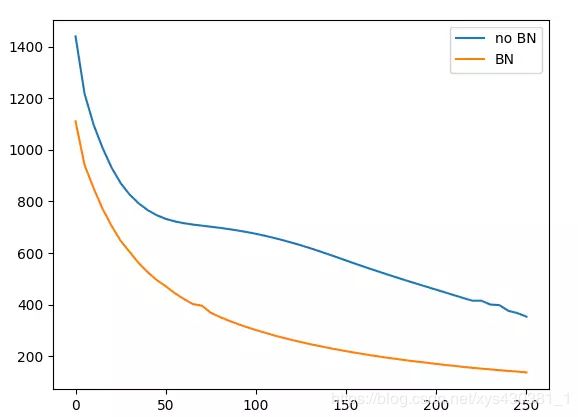
很明显,经过BN处理后的网络收敛的更快。下图显示了两者的loss的变化。
具体的代码链接
参考文献:
深度学习(二十九)Batch Normalization 学习笔记
https://blog.csdn.net/hjimce/article/details/50866313
tensorflow中batch normalization的用法
http://www.cnblogs.com/hrlnw/p/7227447.html
使用tensorflow 的slim模块fine-tune resnet/densenet/inception网络,解决batchnorm问题
https://blog.csdn.net/qq_25737169/article/details/79616671