密度聚类(一)DBSCAN和python实现
密度聚类
密度聚类算法假设聚类结构能通过样本分布的紧密程度确定,通常这类算法从样本密度的角度考虑样本之间的可连接性,并基于可连接样本不断扩展聚类簇以获得最终的聚类结果。
DBSCAN
DBSCAN基于一组“邻域”参数刻画样本分布的紧密程度:
这组参数是 { ϵ , M i n P t s } \left \{ \epsilon ,MinPts \right \} {ϵ,MinPts} ,
ϵ \epsilon ϵ表示与目标点的距离阈值
M i n P t s MinPts MinPts表示处于距离阈值内的样本个数阈值
下面介绍几个概念:
给定一个样本集D={x1,x2,…}
- ϵ \epsilon ϵ邻域:对于D中的某个样本x,样本集D中与x的距离小于 ϵ \epsilon ϵ的样本集合叫做 ϵ \epsilon ϵ邻域。
- 核心对象:若x的 ϵ \epsilon ϵ邻域包含的样本数大于等于 M i n P t s MinPts MinPts,则认为x为一个核心对象
- 密度直达:若xj位于xi的 ϵ \epsilon ϵ邻域,且xi为一个核心对象,则称xj由xi密度直达
- 密度可达:对于xi和xj,存在一个序列xi,x1,x2,…,xn,xj,序列两两之间是密度直达的,则xi和xj是密度可达的
- 密度相连:对于xi和xj,若存在xk使得xi和xj均由xk密度可达,则xi和xj密度相连
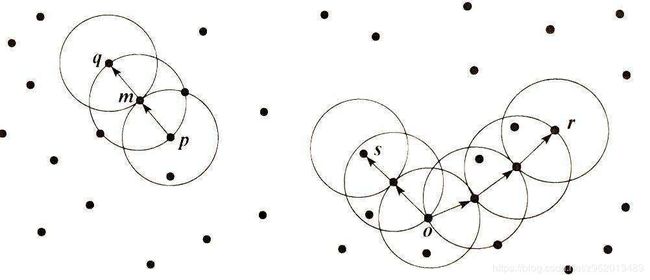
上图若 ϵ \epsilon ϵ为3,则左边m是核心对象,则q点和p点是密度可达
右图s和r是密度相连的,也是密度可达的
根据上面的概念,定义DBSCAN的簇:由密度可达关系导出的最大的密度相连样本集合。
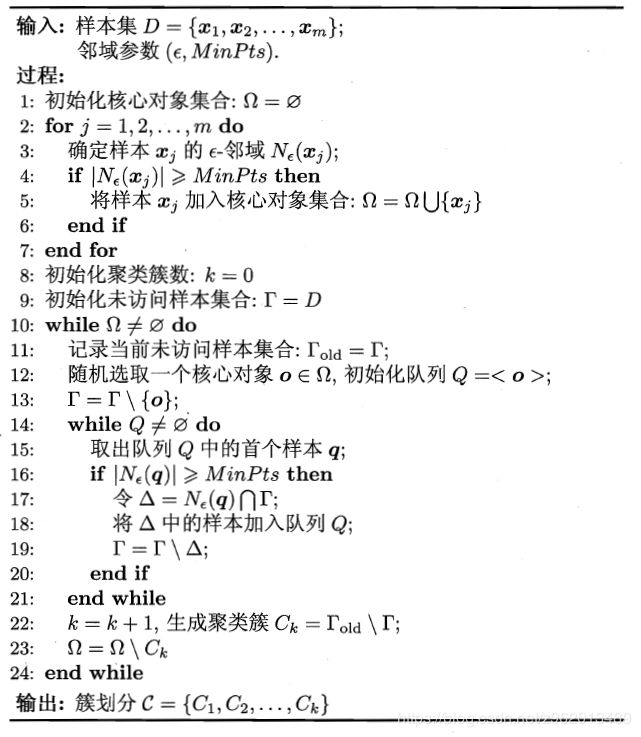
给出DBSCAN的伪代码:
DBSCAN的主要优点有:
1) 可以对任意形状的稠密数据集进行聚类,相对的,K-Means之类的聚类算法一般只适用于凸数据集。
2) 可以在聚类的同时发现异常点,对数据集中的异常点不敏感。
3) 聚类结果没有偏倚,相对的,K-Means之类的聚类算法初始值对聚类结果有很大影响。
DBSCAN的主要缺点有:
1)如果样本集的密度不均匀、聚类间距差相差很大时,聚类质量较差,这时用DBSCAN聚类一般不适合。
2) 如果样本集较大时,聚类收敛时间较长,此时可以对搜索最近邻时建立的KD树或者球树进行规模限制来改进。
3) 调参相对于传统的K-Means之类的聚类算法稍复杂,主要需要对距离阈值ϵ,邻域样本数阈值MinPts联合调参,不同的参数组合对最后的聚类效果有较大影响。
python3.6实现
# -*- coding: gbk -*-
import numpy as np
import matplotlib.pyplot as plt
import copy
from sklearn.datasets import make_moons
from sklearn.datasets.samples_generator import make_blobs
import random
class DBSCAN():
def __init__(self, epsilon, MinPts):
self.epsilon = epsilon
self.MinPts = MinPts
def dist(self, x1, x2):
return np.linalg.norm(x1 - x2)
def getCoreObjectSet(self, X):
N = X.shape[0]
Dist = np.eye(N) * 9999999
CoreObjectIndex = []
for i in range(N):
for j in range(N):
if i > j:
Dist[i][j] = self.dist(X[i], X[j])
for i in range(N):
for j in range(N):
if i < j:
Dist[i][j] = Dist[j][i]
for i in range(N):
# 获取对象周围小于epsilon的点的个数
dist = Dist[i]
num = dist[dist < self.epsilon].shape[0]
if num >= self.MinPts:
CoreObjectIndex.append(i)
return np.array(CoreObjectIndex), Dist
def element_delete(self, a, b):
if isinstance(b, np.ndarray) == False:
b = np.array([b])
for i in range(b.shape[0]):
index = np.where(a == b[i])
a = np.delete(a, index[0])
return a
def fit(self, X):
N = X.shape[0]
CoreObjectIndex, Dist = self.getCoreObjectSet(X)
self.k = 0
self.C = []
UnvisitedObjectIndex = np.arange(N)
while(CoreObjectIndex.shape[0] != 0):
old_UnvisitedObjectIndex = copy.deepcopy(
UnvisitedObjectIndex) # 记录当前未访问的样本id
OriginIndex = np.random.choice(
CoreObjectIndex.shape[0], 1, replace=False) # 随机选取一个核心对象
Queue = np.array([-1, CoreObjectIndex[OriginIndex]]) # 初始化队列
CoreObjectIndex = self.element_delete(
CoreObjectIndex, CoreObjectIndex[OriginIndex]) # 将核心对象id从id集合中除去
while(Queue.shape[0] != 1):
# 取出队列中首个样本id
index = Queue[0]
if index == -1:
Queue = np.delete(Queue, 0)
Queue = np.append(Queue, -1)
continue
Queue = self.element_delete(Queue, index)
index = int(index)
DistWithOthers = Dist[index]
OthersIndex = np.where(DistWithOthers < self.epsilon)[0]
num = OthersIndex.shape[0]
if num >= self.MinPts:
delta = list(set(OthersIndex).intersection(
set(UnvisitedObjectIndex))) # 取核心对象内的样本和未访问样本集合的交集
delta = np.array(delta)
Queue = np.append(Queue, delta)
UnvisitedObjectIndex = self.element_delete(
UnvisitedObjectIndex, delta)
self.k += 1
self.C.append(
self.element_delete(old_UnvisitedObjectIndex, UnvisitedObjectIndex))
CoreObjectIndex = self.element_delete(
CoreObjectIndex, self.C[self.k - 1])
print("共有{} 个簇".format(self.k))
Y = np.zeros(X.shape[0])
for i in range(self.k):
Y[self.C[i]] = i + 3
return Y
def plt_show(self, X, Y, pre_Y, name=0):
if X.shape[1] == 2:
fig = plt.figure(name)
plt.subplot(211)
plt.scatter(X[:, 0], X[:, 1], marker='o', c=Y)
plt.subplot(212)
plt.scatter(X[:, 0], X[:, 1], marker='o', c=pre_Y)
plt.colorbar()
else:
print('error arg')
if __name__ == '__main__':
center = [[1, 1], [-1, -1], [1, -1]]
cluster_std = 0.35
X1, Y1 = make_blobs(n_samples=300, centers=center,
n_features=2, cluster_std=cluster_std, random_state=1)
dbscan1 = DBSCAN(epsilon=0.4, MinPts=5)
pre_Y1 = dbscan1.fit(X1)
dbscan1.plt_show(X1, Y1, pre_Y1, name=1)
center = [[1, 1], [-1, -1], [2, -2]]
cluster_std = [0.35, 0.1, 0.8]
X2, Y2 = make_blobs(n_samples=300, centers=center,
n_features=2, cluster_std=cluster_std, random_state=1)
dbscan2 = DBSCAN(epsilon=0.4, MinPts=5)
pre_Y2 = dbscan2.fit(X2)
dbscan2.plt_show(X2, Y2, pre_Y2, name=2)
X3, Y3 = make_moons(n_samples=1000, noise=0.1)
dbscan3 = DBSCAN(epsilon=0.1, MinPts=5)
pre_Y3 = dbscan3.fit(X3)
dbscan3.plt_show(X3, Y3, pre_Y3, name=3)
plt.show()
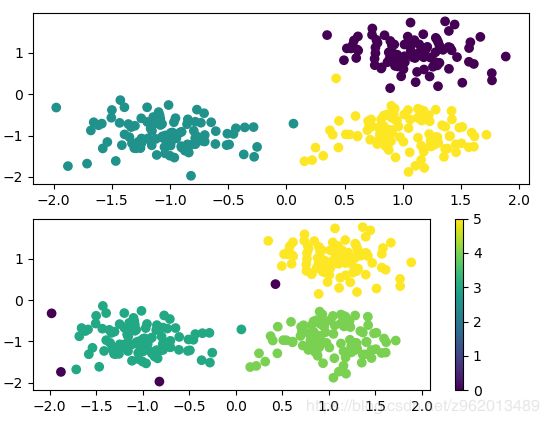
对于3类密度均匀的类别样本集,DBSCAN可以很好的聚类,图中紫色的点为异常点。

对于3类密度不均匀的类别样本集,DBSCAN的聚类效果有点差,黄色类别的样本集中出现了很多异常点。
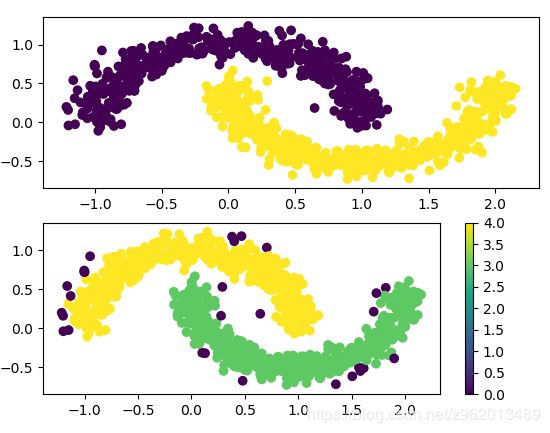
对于不是高斯分布的样本集,密度聚类的效果比原型聚类要强很多
参考文献
《机器学习》周志华
https://www.cnblogs.com/pinard/p/6208966.html