深度学习入门
1.1 什么是学习?
赫伯特·西蒙教授(Herbert Simon,1975年图灵奖获得者、1978年诺贝尔经济学奖获得者)曾对“学习”给了一个定义:“如果一个系统,能够通过执行某个过程,就此改进了它的性能,那么这个过程就是学习”
学习的核心目的,就是改善性能。
1.2 什么是机器学习?
对于某类任务(Task,简称T)和某项性能评价准则(Performance,简称P),如果一个计算机程序在T上,以P作为性能的度量,随着很多经验(Experience,简称E)不断自我完善,那么我们称这个计算机程序在从经验E中学习了
对于一个学习问题,我们需要明确三个特征:任务的类型,衡量任务性能提升的标准以及获取经验的来源
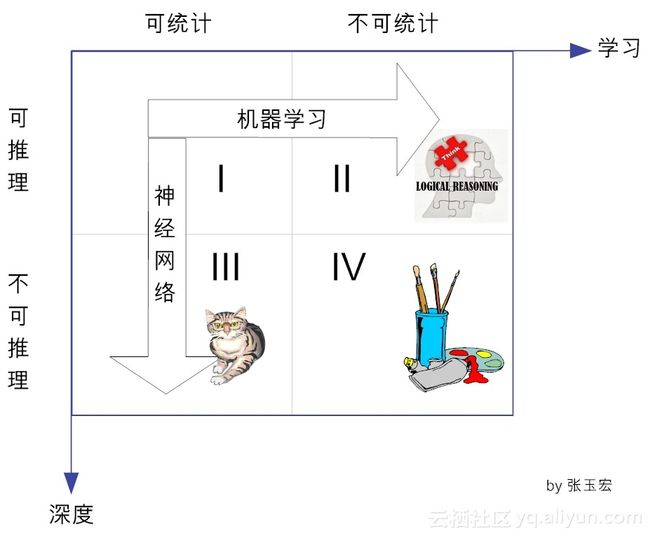
1.3 学习的4个象限
1.4 机器学习的方法论
“end-to-end”(端到端)说的是,输入的是原始数据(始端),然后输出的直接就是最终目标(末端),中间过程不可知,因此也难以知。
就此,有人批评深度学习就是一个黑箱(Black Box)系统,其性能很好,却不知道为何而好,也就是说,缺乏解释性。其实,这是由于深度学习所处的知识象限决定的。从图1可以看出,深度学习,在本质上,属于可统计不可推理的范畴。“可统计”是很容易理解的,就是说,对于同类数据,它具有一定的统计规律,这是一切统计学习的基本假设。
在哲学上讲,这种非线性状态,是具备了整体性的“复杂系统”,属于复杂性科学范畴。复杂性科学认为,构成复杂系统的各个要素,自成体系,但阡陌纵横,其内部结构难以分割。简单来说,对于复杂系统,1+1≠2,也就是说,一个简单系统,加上另外一个简单系统,其效果绝不是两个系统的简单累加效应,而可能是大于部分之和。因此,我们必须从整体上认识这样的复杂系统。于是,在认知上,就有了从一个系统或状态(end)直接整体变迁到另外一个系统或状态(end)的形态。这就是深度学习背后的方法论。
“Divide and Conquer(分而治之)”,其理念正好相反,在哲学它属于“还原主义(reductionism,或称还原论)”。在这种方法论中,有一种“追本溯源”的蕴意包含其内,即一个系统(或理论)无论多复杂,都可以分解、分解、再分解,直到能够还原到逻辑原点。
在意象上,还原主义就是“1+1=2”,也就是说,一个复杂的系统,都可以由简单的系统简单叠加而成(可以理解为线性系统),如果各个简单系统的问题解决了,那么整体的问题也就得以解决。
经典机器学习(位于第Ⅱ象限),在哲学上,在某种程度上,就可归属于还原主义。传统的机器学习方式,通常是用人类的先验知识,把原始数据预处理成各种特征(feature),然后对特征进行分类。
然而,这种分类的效果,高度取决于特征选取的好坏。传统的机器学习专家们,把大部分时间都花在如何寻找更加合适的特征上。故此,传统的机器学习,其实可以有个更合适的称呼——特征工程(feature engineering)。这也是有好处的,因为这些特征是由人找出来的,自然也就为人所能理解,性能好坏,可以灵活调整。
1.5 什么是深度学习?
机器学习的专家们发现,可以让神经网络自己学习如何抓取数据的特征,这种学习的方式,效果更佳。于是兴起了特征表示学习(feature representation learning)的风潮。这种学习方式,对数据的拟合也更加的灵活好用。于是,人们终于从自寻“特征”的中解脱出来。
但这种解脱也付出了代价,那就是机器自己学习出来的特征,它们存在于机器空间,完全超越了人类理解的范畴,对人而言,这就是一个黑盒世界。为了让神经网络的学习性能,表现得更好一些,人们只能依据经验,不断地尝试性地进行大量重复的网络参数调整。于是,“人工智能”领域就有这样的调侃:“有多少人工,就有多少智能”。
再后来,网络进一步加深,出现了多层次的“表示学习”,它把学习的性能提升到另一个高度。这种学习的层次多了,就给它取了个特别的名称——Deep Learning(深度学习)。
深度学习的学习对象同样是数据。与传统机器学习所不同的是,它需要大量的数据,也就是“大数据(Big Data)”。
2.2 深度学习的归属

把深度学习和传统的监督学习和无监督学习单列出来,自然是有一定道理的。这就是因为,深度学习是高度数据依赖型的算法,它的性能通常随着数据量的增加而不断增强,也就是说它的可扩展性(Scalability)显著优于传统的机器学习算法
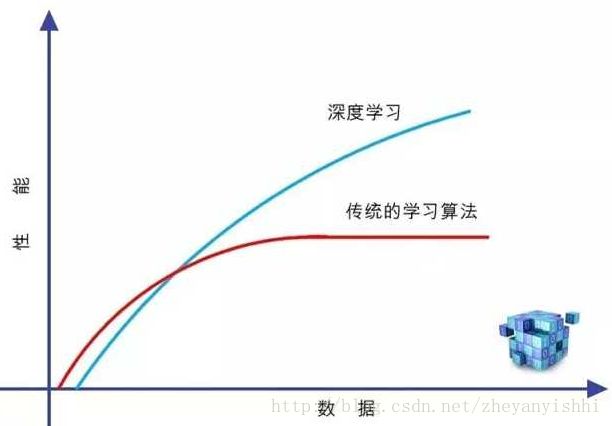
如果训练数据比较少,深度学习的性能并不见得就比传统机器学习好。其原因在于,作为复杂系统代表的深度学习算法,只有数据量足够多,才能通过训练,在深度神经网络中,将蕴含于数据之中的复杂模式表征出来。
机器学习要想做得好,需要走好三大步:
(1) 如何找一系列函数来实现预期的功能,这是建模问题;
(2) 如何找出一组合理的评价标准,来评估函数的好坏,这是评价问题;
(3) 如何快速找到性能最佳的函数,这是优化问题(比如说,机器学习中梯度下降法)。
2.4 为什么要用神经网络?
深度学习的概念源于人工神经网络的研究。含多隐层的多层感知机就是一种深度学习结构。所以说到深度学习,就不能不提神经网络。
“神经网络,是一种由具有自适应性的简单单元构成的广泛并行互联的网络,它的组织结构能够模拟生物神经系统对真实世界所作出的交互反应。”
那为什么要用神经网络学习呢?
在人工智能领域,有两大主流。第一个是符号主义。符号主义的理念是,知识是信息的一种表达形式,人工智能的核心任务,就是处理好知识表示、知识推理和知识运用。核心方法论是,自顶向下设计规则,然后通过各种推理,逐步解决问题。很多人工智能的先驱(比如CMU的赫伯特•西蒙)和逻辑学家,很喜欢这种方法。但这个的发展,目前看来并不太好。
还有一个就是试图编写一个通用模型,然后通过数据训练,不断改善模型中的参数,直到输出的结果符合预期,这个就是连接主义。连接主义认为,人的思维就是某些神经元的组合。因此,可以在网络层次上模拟人的认知功能,用人脑的并行处理模式,来表征认知过程。这种受神经科学的启发的网络,被称之人工神经网络(Artificial Neural Network,简称ANN)。这个网络的升级版,就是目前非常流行的深度学习。
机器学习在本质就是寻找一个好用的函数。而人工神经网络最“牛逼”的地方在于,它可以在理论上证明:只需一个包含足够多神经元的隐藏层,多层前馈网络能以任意进度逼近任意复杂度的连续函数。这个定理也被称之为通用近似定理(Universal Approximation Theorem)。这里的“Universal”,也有人将其翻译成“万能的”,由此可见,这个定理的能量有多大。换句话说,神经网络可在理论上解决任何问题。
3.1 M-P神经元模型是什么?
现在所讲的神经网络包括深度学习,都在某种程度上,都是在模拟大脑神经元的工作机理,它就是上世纪40年代提出但一直沿用至今的“M-P神经元模型”。
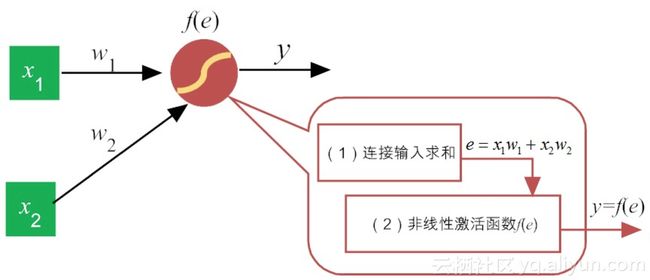
在这个模型中,神经元接收来自n个其它神经元传递过来的输入信号,这些信号的表达,通常通过神经元之间连接的权重(weight)大小来表示,神经元将接收到的输入值按照某种权重叠加起来,并将当前神经元的阈值进行比较,然后通过“激活函数(activation function)”向外表达输出(这在概念上就叫感知机)。

3.3 激活函数是怎样的一种存在?
神经元的工作模型存在“激活(1)”和“抑制(0)”等两种状态的跳变,那么理想型的激活函数(activation functions)就应该是阶跃函数,但这种函数具有不光滑、不连续等众多不“友好”的特性。为什么说它“不友好”呢,这是因为在训练网络权重时,通常依赖对某个权重求偏导、寻极值,而不光滑、不连续等通常意味着该函数无法“连续可导”。

因此,我们通常用Sigmoid函数来代替阶跃函数。这个函数可以把较大变化范围内输入值(x)挤压输出在(0,1)范围之内,故此这个函数又称为“挤压函数(Squashing function)”。
3.4 卷积函数又是什么?
所谓卷积,就是一个功能和另一个功能在时间的维度上的“叠加”作用。
由卷积得到的函数h一般要比f和g都光滑。利用这一性质,对于任意的可积函数f,都可简单地构造出一列逼近于f的光滑函数列,这种方法被称之为函数的光滑化或正则化。
在时间的维度上的“叠加作用”,如果函数是离散的,就用求累积和来刻画。如果函数是连续的,就求积分来表达。
4.1机器学习的三个层次
大致可分为三类:
(1)监督学习(Supervised Learning):
监督学习基本上就是“分类(classification)”的代名词。它从有标签的训练数据中学习,然后给定某个新数据,预测它的标签(given data, predict labels)。
简单来说,监督学习的工作,就是通过有标签的数据训练,获得一个模型,然后通过构建的模型,给新数据添加上特定的标签。
整个机器学习的目标,都是使学习得到的模型,能很好地适用于“新样本”,而不是仅仅在训练样本上工作得很好。通过训练得到的模型,适用于新样本的能力,称之为“泛化(generalization)能力”。
(2)非监督学习(Unsupervised Learning):
与监督学习相反的是,非监督学习所处的学习环境,都是非标签的数据。非监督学习,本质上,就是“聚类(cluster)”的近义词。
简单来说,给定数据,从数据中学,能学到什么,就看数据本身具备什么特性(given data, learn about that data)。我们常说的“物以类聚,人以群分”说得就是“非监督学习”。这里的“类”也好,“群”也罢,事先我们是不知道的。一旦我们归纳出“类”或“群”的特征,如果再要来一个新数据,我们就根据它距离哪个“类”或“群”较近,就“预测”它属于哪个“类”或“群”,从而完成新数据的“分类”或“分群”功能。
(3)半监督学习(Semi-supervised Learning):
这类学习方式,既用到了标签数据,又用到了非标签数据。
给定一个来自某未知分布的有标记示例集L={(x1, y1), (x2, y2), …, (xl, yl)},其中xi是数据,yi是标签。对于一个未标记示例集U = {xl+1, x l+1, … , xl+u},I《u,于是,我们期望学得函数 f:X→Y 可以准确地对未标识的数据xi预测其标记yi。这里均为d维向量, yi∈Y为示例xi的标记。
半监督学习就是以“已知之认知(标签化的分类信息)”,扩大“未知之领域(通过聚类思想将未知事物归类为已知事物)”。但这里隐含了一个基本假设——“聚类假设(cluster assumption)”,其核心要义就是:“相似的样本,拥有相似的输出”。
5.2 认识“感知机”
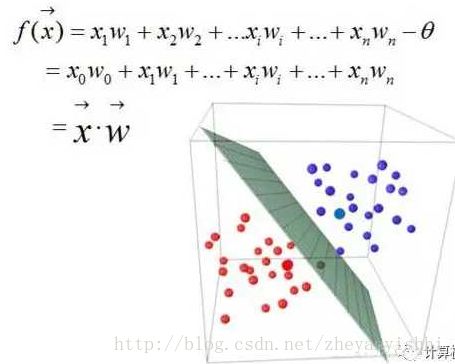
所谓的感知机,其实就是一个由两层神经元构成的网络结构,它在输入层接收外界的输入,通过激活函数(含阈值)的变换,把信号传送至输出层,因此它也称之为“阈值逻辑单元(threshold logic unit)”。
所有“有监督”的学习,在某种程度上,都是分类(classification)学习算法。而感知机就是有监督的学习,所以,它也是一种分类算法。
5.3 感知机是如何学习的?
对象本身的特征值,一旦确定下来就不会变化。因此,所谓神经网络的学习规则,就是调整权值和阈值的规则(这个结论对于深度学习而言,依然是适用的)。
假设我们的规则是这样的:
其中ep = y- y’,y为期望输出,y’是实际输出,所以,具体说来,ep是二者的差值。
5.4 感知机的训练法则
感知机的学习规则:对于训练样例(x,y)(需要注意的是,这里粗体字x表示训练集合),若当前感知机的实际输出y’,假设它不符合预期,存在“落差”,那么感知机的权值依据如公式规则调整:

其中,η∈(0,1)称为学习率(learning rate)
这里需要注意的是,学习率η的作用是“缓和”每一步权值调整强度的。它本身的大小,也是比较难以确定的。如果η太小,网络调参的次数就太多,从而收敛很慢。如果η太大,容易错过了网络的参数的最优解。因此,合适的η大小,在某种程度上,还依赖于人工经验。
5.5 感知机的表征能力
1969年,马文·明斯基和西摩尔· 派普特(Seymour Papert)在出版了《感知机:计算几何简介”》一书[2], 书中论述了感知机模型存在的两个关键问题:
(1)单层的神经网络无法解决不可线性分割的问题,典型例子如异或门电路(XOR Circuit);
(2)更为严重的问题是,即使使用当时最先进的计算机,也没有足够计算能力,完成神经网络模型所需要的超大的计算量(比如调整网络中的权重参数)。
鉴于明斯基的江湖地位(1969年刚刚获得大名鼎鼎的图灵奖),他老人家一发话不要紧,直接就把人工智能的研究,送进一个长达近二十年的低潮,史称“人工智能冬天(AI Winter)”。
6.1 复杂网络解决“异或”问题
感知机之所以当初无法解决“非线性可分”问题,是因为相比于深度学习这个复杂网络,感知机太过于简单”。
想解决“异或”问题,就需要使用多层网络。这是因为,多层网络可以学习更高层语义的特征,其特征表达能力更强。因此,我们在输入层和输出层之间,添加一层神经元,将其称之为隐含层(“隐层”)。于是隐层和输出层中的神经元都有激活函数。

1958年Frank Rosenblatt提出感知机的概念。1965年Alexey Grigorevich Ivakhnenko提出了多层人工神经网络的设想。而这种基于多层神经网络的机器学习模型,后来被人们称为“深度学习”。
6.2 多层前馈神经网络
常见的多层神经网络如图所示。在这种结构中,每一层神经元仅仅与下一层的神经元全连接。而在同一层,神经元彼此不连接,而且跨层的神经元,彼此间也不相连。这种被简化的神经网络结构,被称之为“多层前馈神经网络(multi-layer feedforward neural networks)”。
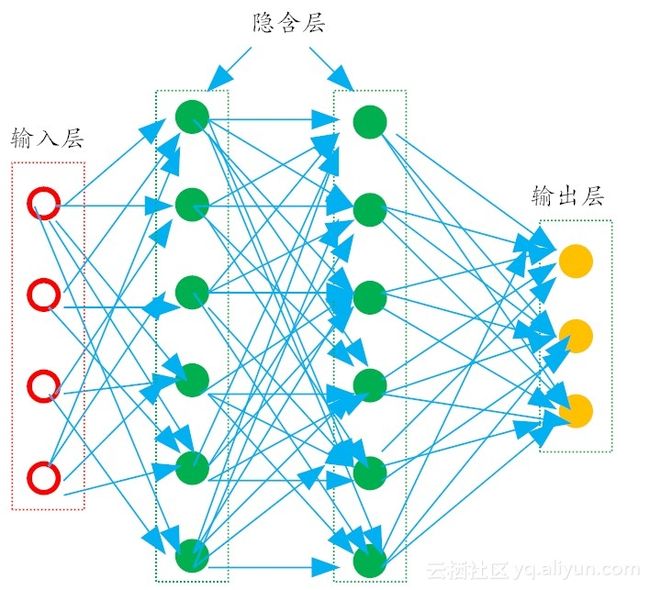
在多层前馈神经网络中,输入层神经元主要用于接收外加的输入信息,在隐含层和输出层中,都有内置的激活函数,可对输入信号进行加工处理,最终的结果,由输出层“呈现”出来。
这里需要说明的是,神经元中的激活函数,并不限于我们前面提到的阶跃函数、Sigmod函数,还可以是现在深度学习常用的ReLU(Rectified Linear Unit)和sofmax等。
简单来说,神经网络的学习过程,就是通过根据训练数据,来调整神经元之间的连接权值(connection weight)以及每个功能神经元的输出阈值。换言之,神经网络需要学习的东西,就蕴含在连接权值和阈值之中。
6.3 误差逆传播算法
对于相对复杂的前馈神经网络,其各个神经元之间的链接权值和其内部的阈值,是整个神经网络的灵魂所在,它需要通过反复训练,方可得到合适的值。而训练的抓手,就是实际输出值和预期输出值之间存在着“误差”。
在机器学习中的“有监督学习”算法里,在假设空间中,构造一个决策函数f,对于给定的输入X,由f(X)给出相应的输出Y,这个实际输出值Y和原先预期值Y’可能不一致。于是,我们需要定义一个损失函数(loss function),也有人称之为代价函数(cost function)来度量这二者之间的“落差”程度。这个损失函数通常记作L(Y,Y)= L(Y, f(X)),为了方便起见,这个函数的值为非负数(请注意:这里的大写Y和Y’,分别表示的是一个输出值向量和期望值向量,它们分别包括多个不同对象的实际输出值和期望值)。
常见的损失函数有如下3类:

损失函数值越小,说明实际输出和预期输出的差值就越小,也就说明我们构建的模型越好。
神经网络学习的本质,其实就是利用“损失函数(loss function)”,来调节网络中的权重(weight)。
调神经网络的权值,有两大类方法比较好使。第一种方法就是“误差反向传播(Error Back propagation,简称BP)”。简单说来,就是首先随机设定初值,然后计算当前网络的输出,然后根据网络输出与预期输出之间的差值,采用迭代的算法,反方向地去改变前面各层的参数,直至网络收敛稳定。
BP算法非常经典,在很多领域都有着经典的应用,当时它的火爆程度在绝不输给现在的“深度学习”。但后来大家发现,实际用起来它还是有些问题。比如说,在一个层数较多网络中,当它的残差反向传播到最前面的层(即输入层),其影响已经变得非常之小,甚至出现梯度扩散(gradient-diffusion),严重影响训练精度。
再后来,第二类改进方法就孕育而生了。它就是当前主流的方法,也就是“深度学习”常用的“逐层初始化”(layer-wise pre-training)训练机制,不同于BP的“从后至前”的训练参数方法,“深度学习”采取的是一种从“从前至后”的逐层训练方法。
7.3到底什么是梯度?
在单变量的实值函数中,梯度就可以简单地理解为只是导数,或者说对于一个线性函数而言,梯度就是线的斜率。但对于多维变量的函数,它的梯度概念就不那么容易理解了。
在向量微积分中,标量场的梯度其实是一个向量场(vector field)。对于特定函数的某个特定点,它的梯度就表示从该点出发,该函数值增长最为迅猛的方向(direction of greatest increase of a function)。
梯度最明显的应用,就是快速找到多维变量函数的极(大/小)值。
“梯度递减”的问题所在,那就是它很容易收敛到局部最小值。
7.5 重温神经网络的损失函数
相比于神经网络输入、输出层设计的简单直观,它的隐含层设计,可就没有那么简单了。依赖于“工匠”的打磨,它就是一个体力活,需要不断地“试错”。
但通过不断地“折腾”,研究人员掌握了一些针对隐层的启发式设计规则(如下文即将提到的BP算法),以此降低训练网络所花的开销,并尽量提升网络的性能。
为了达到理想状态,我们希望快速配置好网络参数,从而让这个损失函数达到极小值。这时,神经网络的性能也就接近最优!
8.1 BP神经网络
BP算法,是一个典型的双向算法。更确切来说,它的工作流程是分两大步走:
(1)正向传播输入信号,输出分类信息(对于有监督学习而言,基本上都可归属于分类算法);
(2)反向传播误差信息,调整全网权值(通过微调网络参数,让下一轮的输出更加准确)。
8.2.1正向传播信息
类似于感知机,每一个神经元的功能都可细分两大部分:(1)汇集各路链接带来的加权信息;(2)加权信息在激活函数的“加工”下,神经元给出相应的输出
到第一轮信号前向传播的输出值计算出来后,实际输出向量与预期输出的向量之间的误差就可计算出来。下面我们就用“误差”信息反向传播,来逐层调整网络参数。为了提高权值更新效率,这里就要用到下文即将提到的“反向模式微分法则(chain rule)”。
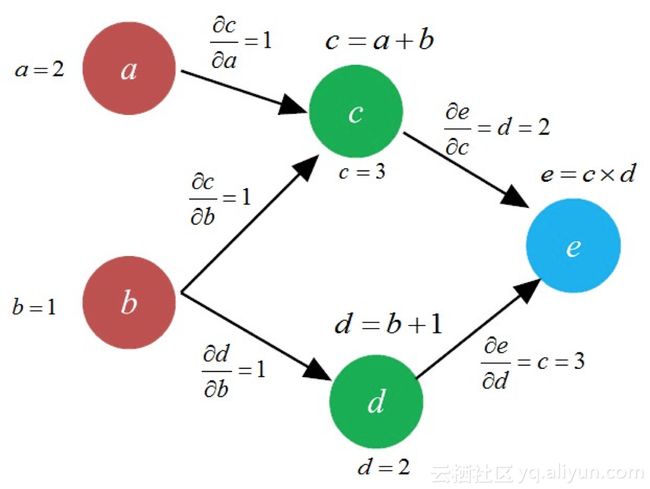
8.2.2 求导中的链式法则
一般化的神经网络示意图:
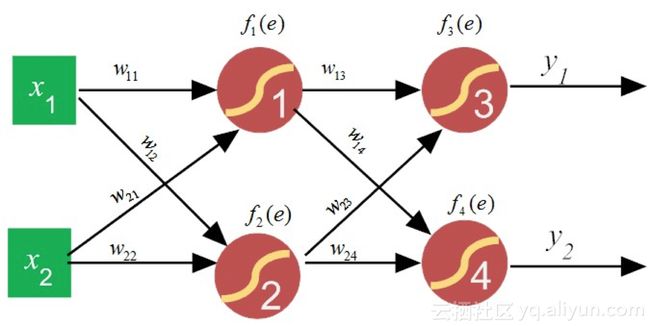
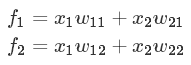
为了简化理解,暂时假设神经元没有激活函数(或称激活函数为y=xy=x),于是对于隐含层神经元,它的输出可分别表示为:
然后,对于输出层神经元有:

于是,损失函数 L 可表示为公式:
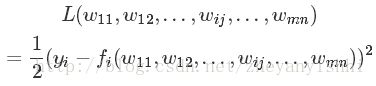
这里 Y 为预期输出值向量(由 y1,y2,...,yi,... 等元素构成),实际输出向量为 fi(w11,w12,...,wij,...,wmn) 。
对于有监督学习而言,在特定训练集合下,输入元素 xi 和预期输出 yi 都可视为常量。由此可以看到,损失函数 L ,在本质上,就是一个单纯与权值 wij 相关的函数(即使把原本的激活函数作用加上去,除了使得损失函数的形式表现得更加复杂外,并不影响这个结论)。
于是,损失函数 L 梯度向量可表示为公式:

其中,这里的 eij 是正交单位向量。为了求出这个梯度,需要求出损失函数 L 对每一个权值 wij 的偏导数。
链式求导示例图:
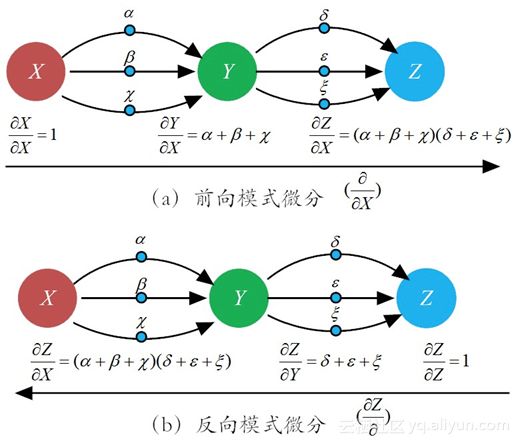
当网络结构简单时,即使 X 到 Z 的每一个路径都使用前向模式微分(forward-mode differentiation)”,也不会有很多路径,但一旦网络结构的复杂度上去了,这种“前向模式微分”,就会让求偏导数的次数和神经元个数的平方成正比。这个计算量,就很可能是成为机器“难以承受的计算之重”。
为了避免这种海量求导模式,数学家们另辟蹊径,提出了一种称之为“反向模式微分(reverse-mode differentiation)”。取代之前的简易的表达方式,我们用下面的公式的表达方式来求 X 对 Z 的偏导:

前向模式微分方法,其实就是我们在高数课堂上学习的求导方式。在这种求导模式中,强调的是某一个输入(比如 X )对某一个节点(如神经元)的影响。因此,在求导过程中,偏导数的分子部分,总是根据不同的节点总是不断变化,而分母则锁定为偏导变量“ ∂X ”,保持定不变。
反向模式微分方法则有很大不同。首先在求导方向上,它是从输出端(output)到输入端进行逐层求导。其次,在求导方法上,它不再是对每一条“路径”加权相乘然后求和,而是针对节点采纳“合并同类路径”和“分阶段求解”的策略。先求 Y 节点对 Z 节点的”总影响”(反向第一层),然后,再求节点 X 对节点 Z 的总影响(反向第二层)。
特别需要注意的是, ∂Z/∂Y 已经在第一层求导得到。在第二层仅仅需要求得 ∂Y/∂X ,然后二者相乘即可得到所求。这样一来,就大大减轻了第二层的求导负担。在求导形式上,偏导数的分子部分(节点)不变,而分母部分总是随着节点不同而变化。
利用链式法则,反向模式微分方法就能避免冗余对所有路径只求一次导数,大大加快了运行速度!BP算法把网络权值纠错的运算量,从原来的与神经元数目的平方成正比,下降到只和神经元数目本身成正比。其功劳,正是得益于这个反向模式微分方法节省的计算冗余。
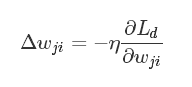
8.2.3 误差反向传播
误差反向传播通过梯度下降算法,迭代处理训练集合中的样例,一次处理一个样例。对于样例 d ,如果它的预期输出和实际输出有“误差”,BP算法抓住这个误差信号 Ld ,以“梯度递减”的模式修改权值。也就是说,对于每个训练样例 d ,权值 wji 的校正幅度为 Δwji (需要说明的是, wji 和 wij 其实都是同一个权值, wji 表示的是神经元 j 的第 i 个输入相关的权值,这里之所以把下标“ j ”置于“ i ”之前,仅仅表示这是一个反向更新过程而已):
在这里, Ld 表示的是训练集合中样例 d 的误差,分解到输出层的所有输出向量, Ld 可表示为:

其中:
yj 表示的是第 j 个神经单元的预期输出值。
y'j 表示的 j 个神经单元的实际输出值。
outputs 的范围是网络最后一层的神经元集合。
下面我们推导出 ∂Ld/∂wji 的一个表达式,以便在上面的公式中使用梯度下降规则。
首先,我们注意到,权值 wji 仅仅能通过 netj 影响其他相连的神经元。因此利用链式法则有:
在这里, netj=∑iwjixji ,也就是神经元 j 输入的加权和。 xji 表示的神经 j 的第 i 个输入。需要注意的是,这里的 xji 是个统称,实际上,在反向传播过程中,在经历输出层、隐含层和输入层时,它的标记可能有所不同。
由于在输出层和隐含层的神经元对“纠偏”工作,承担的“责任”是不同的,至少是形式不同,所以需要我们分别给出推导。
(1)在输出层,对第 i 个神经元而言,省略部分推导过程,上一公式的左侧第一项为:
为了方便表达,我们用该神经元的纠偏“责任(responsibility)” δ(1)j 描述这个偏导,即:
这里 δ(1)j 的上标“(1)”,表示的是第1类(即输出层)神经元的责任。如果上标为“(2)”,则表示第2类(即隐含层)神经元的责任,见下面的描述。
(2)对隐含层神经元jj的梯度法则(省略了部分推导过程),有:

其中:
fj 表示神经单元jj的计算输出。
netj 表示的是神经单元jj的加权之和。
Downstream(j) 表示的是在网络中神经单元jj的直接下游单元集合。
在明确了各个神经元“纠偏”的职责之后,下面就可以依据类似于感知机学习,通过如下加法法则更新权值:
对于输出层神经元有:
对于隐含层神经元有:

在这里, η∈(0,1) 表示学习率。在实际操作过程中,为了防止错过极值, η 通常取小于0.1的值。 hj 为神经元j的输出。 xjk 表示的是神经单元 j 的第 k 个输入。
题外话:
LeCun成功应用BP神经网络在手写邮编识别之后,与LeCun同在一个贝尔实验室的同事Vladimir Vapnik(弗拉基米尔·万普尼克),提出并发扬光大了支持向量机 (Support Vector Machine) 算法。
SVM作为一种分类算法,对于线性分类,自然不在话下。在数据样本线性不可分时,它使用了所谓“核机制(kernel trick)”,将线性不可分的样本,映射到高维特征空间 (high-dimensional feature space),从而使其线性可分。自上世纪九十年代初开始,SVM在图像和语音识别等领域,获得了广泛而成功的应用。
在手写邮政编码的识别问题上,LeCun利用BP算法,把错误率整到5%左右,而SVM在1998年就把错误率降到低至0.8%。这远超越同期的传统神经网络算法。
就这样,万普尼克又把神经网络研究送到了一个新的低潮!