图像处理理论(七)——LBP, Fisherface, Viola-Jones
LBP(续)
圆形LBP算子
基本的LBP算子的最大缺陷在于它只覆盖了一个固定半径范围内的小区域,这显然不能满足不同尺寸和频率纹理的需要。为了适应不同尺度的纹理特征,并达到灰度和旋转不变性的要求,Ojala等对LBP算子进行了改进,将3x3邻域扩展到任意邻域,并用圆形邻域代替了正方形邻域,改进后的LBP算子允许在半径为R的圆形邻域内有任意多个像素点。从而得到了诸如半径为R的圆形区域内含有P个采样点的LBP算子。比如下图定了一个5x5的邻域:
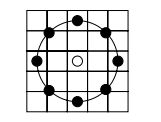
上图内有八个黑色的采样点,每个采样点的值可以通过下式计算:
通过上式可以计算任意个采样点的坐标,但是计算得到的坐标未必完全是整数,所以可以通过双线性插值来得到该采样点的像素值:
LBP等价模式
一个LBP算子可以产生不同的二进制模式,对于半径为R的圆形区域内含有P个采样点的LBP算子将会产生 2p 2 p 种模式。很显然,随着邻域集内采样点数的增加,二进制模式的种类是急剧增加的。例如:5×5邻域内20个采样点,有 220 2 20 =1,048,576种二进制模式。如此多的二值模式无论对于纹理的提取还是对于纹理的识别、分类及信息的存取都是不利的。
同时,过多的模式种类对于纹理的表达是不利的。例如,将LBP算子用于纹理分类或人脸识别时,常采用LBP模式的统计直方图来表达图像的信息,而较多的模式种类将使得数据量过大,且直方图过于稀疏。因此,需要对原始的LBP模式进行降维,使得数据量减少的情况下能最好的代表图像的信息。
为了解决二进制模式过多的问题,提高统计性,Ojala提出了采用一种“等价模式”(Uniform Pattern)来对LBP算子的模式种类进行降维。Ojala等认为,在实际图像中,绝大多数LBP模式最多只包含两次从1到0或从0到1的跳变。因此,Ojala将“等价模式”定义为:当某个LBP所对应的循环二进制数从0到1或从1到0最多有两次跳变时,该LBP所对应的二进制就称为一个等价模式类。如00000000(0次跳变),00000111(只含一次从0到1的跳变),10001111(先由1跳到0,再由0跳到1,共两次跳变)都是等价模式类。除等价模式类以外的模式都归为另一类,称为混合模式类。
通过这样的改进,二进制模式的种类大大减少,而不会丢失任何信息。模式数量由原来的 2p 2 p 种减少为 p(p−1)+2 p ( p − 1 ) + 2 种。这种丢掉2次以上跳变信息的方法,实际上就是一种高频滤波。
LBP特征匹配
如果将以上得到的LBP值直接用于人脸识别,其实和不提取LBP特征没什么区别,会造成计算量准确率等一系列问题。我们可以将一副人脸图像分为7x7的子区域,并在子区域内根据LBP值统计其直方图,以直方图作为其判别特征。这样做的好处是在一定范围内避免图像没完全对准的情况,同时也对LBP特征做了降维处理。
对于得到的直方图特征,有多种方法可以判别其相似性。常见的有Histogram intersection和Chi square statistic。
Histogram intersection
Histogram intersection出自以下论文:
《The Pyramid Match Kernel: Discriminative Classification with Sets of Image Features》
Kristen Grauman,Boston College本科(2001)+MIT硕士(2003)+MIT博士(2006),University of Texas at Austin教授,Marr Prize(2011)。导师是Trevor Darrell。
绝对的美女,靠脸吃饭都没问题的那种。
个人主页:
http://www.cs.utexas.edu/~grauman/
从她的主页来看,她手下有很多亚裔学生。还有一些在线课程,其中有部分是博士课程,只适合高手挑战。David Courtnay Marr,1945~1980,英国神经学家和生理学家。Trinity College, Cambridge博士(1972),MIT教授。35岁死于白血病。他在神经科学,尤其是视觉方面有重大贡献。
Marr Prize由International Conference on Computer Vision颁发,2年一次,是CV界的最高荣誉。何恺明是去年(2017)的新晋得主。
假设图像或其他数据的特征可以构成直方图,根据直方图间距的不同可以得到多种类型的直方图:
H的下标每增加1,则直方图间距变为原来的两倍。 H−1 H − 1 表示每个样本都有自己的bin,而 HL H L 表示所有的样本都在一个bin中。
两个数据集的相似度可以用下式来匹配:
其中, wi=12i,Ni=I(Hi(y),Hi(z))−I(Hi−1(y),Hi−1(z)) w i = 1 2 i , N i = I ( H i ( y ) , H i ( z ) ) − I ( H i − 1 ( y ) , H i − 1 ( z ) ) 。
I的计算方法如下图所示:
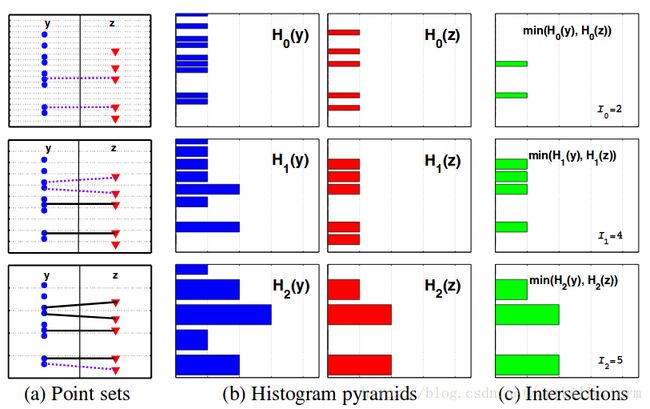
(a)里的y和z代表两种数据分布,三幅图代表三层金字塔,每一层里有间距相等的虚线。
可以看到红点蓝点的位置是固定的,但是根据直方图宽度的不同可以划到不同的直方图里,如(b)所示。
(c)图就是L的计算结果,是通过(b)里两种直方图取交集得来的。
注意:这里的I表示的是交集里元素的个数(即(a)中的连线数),而不是交集的个数(即(c)中的绿条个数)。
Chi square statistic
在《数学狂想曲(五)》中,我们给出了 χ2 χ 2 检验的原理和公式。这里仅对于直方图相似度给出最后的公式:
其中,i为图像的某块小区域,j为小区域内直方图的某一列的值。 wj w j 是每块小区域的权重,比如在人脸区域中,眼睛、嘴巴等区域包含的信息量更为丰富,那么这些区域的权重就可以设置的大一些。
参考
http://blog.csdn.net/smartempire/article/details/23249517
LBP方法
http://blog.csdn.net/dujian996099665/article/details/8886576
LBP算法的研究及其实现
https://mp.weixin.qq.com/s/iFlnZ8z5baUdWCZxIGkq5g
机器学习实战——LBP特征提取
Fisherface
Fisherface由Peter N. Belhumeur, Joao P. Hespanha和David J. Kriegman于1997年提出。
Peter N. Belhumeur,Brown University本科(1985)+Harvard University博士(1993),Yale University和Columbia University教授。
Joao P. Hespanha,Instituto Superior Técnico, Lisbon, Portugal本硕(1991,1993)+ Yale University博士。UCSB教授。
David J. Kriegman,Princeton University本科(1983)+Stanford University硕博(1984,1989)。UCSD教授。
论文:
《Eigenfaces vs. Fisherfaces: Recognition Using Class Specific Linear Projection》
Eigenfaces的主要原理基于PCA,而Fisherface的主要原理基于LDA(参见《机器学习(三十一)》)。这里不再赘述。
参考:
http://blog.csdn.net/smartempire/article/details/23377385
Fisherface(LDA)
Viola-Jones
Viola-Jones方法由Paul Viola和Michael Jones于2001年提出。
Paul Viola,MIT本科(1988)+博士(1995)。先后在微软、Amazon担任研究员。
Michael Jones,MIT博士(1997)。现为Mitsubishi electric research laboratories研究员。
论文:
《Rapid Object Detection using a Boosted Cascade of Simple Features》
《Robust real-time face detection》
《An Extended Set of Haar-like Features for Rapid Object Detection》
《Learning Multi-scale Block Local Binary Patterns for Face Recognition》
《Implementing the Viola-Jones Face Detection Algorithm》
概述
和之前的方法不同,Viola-Jones不仅是一个算法,更是一个框架,前DL时代的人脸检测一般都采用该框架。其准确度也由Fisherface时代的不到70%,上升到90%以上。当然,这里所用的数据集以今天的眼光来看,只能算作玩具了——基本都是正面、无遮挡的标准照,光照也比较理想。但不管怎么说,这也是第一个进入商业实用阶段的目标检测框架,目前大多数的商业化产品仍然基于该框架。
Viola-Jones框架主要有三个要点:
1.Haar-like特征,AdaBoost算法和Cascade结构。Haar-like特征利用积分图像(Integral Image)快速的计算矩形区域的差分信号;
2.AdaBoost算法选择区分能力强的特征结合Stump函数做弱分类器,然后把若干这些弱分类器线性组合在一起增强分类性能;
3.Cascade结构做Early decision快速抛弃明显不是人脸的扫描窗口。
下面我们分别描述一下这几个要点。
Integral image
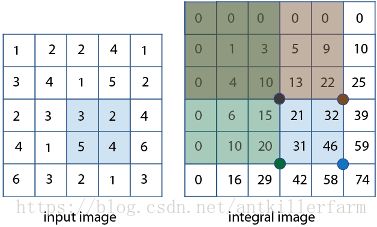
Integral image一种计算差分数据的快速方法。
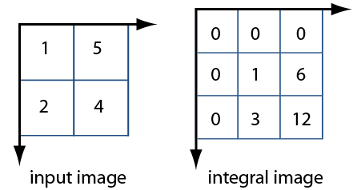
上图左侧是图像的像素值,右侧是相应的积分图。
由
参考:
http://www.mathworks.com/help/vision/ref/integralimage.html
Integral image
Cascade分类器
Cascade分类器,简单来说,就是先将几个通过Adaboost方法得到的强分类器进行排序,排序原则是简单的放在前边。因为通常来说人脸只占一小部分,所以可以很放心地在前几层分类器就拒绝掉大部分非人脸区域。只要前一级拒绝了,就不在进入下一级分类器,这可以大大提高速度。其本质是一颗退化决策树。
参考
https://www.jianshu.com/p/024ad859c8de
人脸检测的Viola-Jones方法
http://c.blog.sina.com.cn/profile.php?blogid=ab0aa22c890006v0
从Viola&Jones的人脸检测说起
http://www.cnblogs.com/hrlnw/archive/2013/10/23/3374707.html
Viola Jones Face Detector
ORB
ORB(Oriented FAST and Rotated BRIEF)特征,从它的名字中可以看出它是对FAST特征点与BREIF特征描述子的一种结合与改进,这个算法是由Ethan Rublee,Vincent Rabaud,Kurt Konolige以及Gary R.Bradski在2011年一篇名为“ORB:An Efficient Alternative to SIFT or SURF”的文章中提出。
参考:
http://www.cnblogs.com/ronny/p/4083537.html
ORB特征点检测
直方图反向投影
http://www.cnblogs.com/zsb517/archive/2012/06/20/2556508.html
opencv直方图反向投影