opencv图片变形 仿射 旋转 透视 弯曲 鱼眼特效
文章目录
- 1. 仿射变换
- 2. 旋转
- 2.1 demo
- 3. 透视变换
- 3.1 demo
- 4. 弯曲
- 4.1 S形状
- 4.2 波浪形
- 5. 鱼眼特效
- 6. 结构定义
- 结构定义(中文)
- 参考文档
1. 仿射变换
可将图片变换为平行四边形
/**@brief从三对对应点计算仿射变换。
@param src[] :原图上取三点坐标(三角形)
@param dst[] :目标三点坐标
@param return :返回2*3的变换矩阵
*/
CV_EXPORTS Mat getAffineTransform( const Point2f src[], const Point2f dst[] );
/ ** @brief对图像应用仿射变换。
函数warpAffine使用指定的矩阵转换源图像:
@param src输入图像。
@param dst输出图像,其大小为dsize,并且与src类型相同。
@param M \ f $ 2 \ times 3 \ f $转换矩阵。
@param dsize输出图像的大小。
@param标志插值方法( 详见 结构定义)
@param borderMode像素外推方法( 详见 结构定义)
borderMode =#BORDER_TRANSPARENT,表示目标图像中的像素对应于源图像中的“异常值”不会被该功能修改。
@param borderValue边界不变时使用的值;默认情况下为0。
@sa warpPerspective,调整大小,重新映射,getRectSubPix,转换
*/
CV_EXPORTS_W void warpAffine( InputArray src, OutputArray dst,
InputArray M, Size dsize,
int flags = INTER_LINEAR,
int borderMode = BORDER_CONSTANT,
const Scalar& borderValue = Scalar());
2. 旋转
/ ** @brief计算2D旋转的仿射矩阵。
@param center源图像中旋转的中心。
@param angle旋转角度,以度为单位。 正值表示逆时针旋转(坐标原点假定为左上角)。
@param scale各向同性比例因子。
@sa getAffineTransform,warpAffine,变换
* /
CV_EXPORTS_W Mat getRotationMatrix2D( Point2f center, double angle, double scale );
2.1 demo
int MPT_test_warpAffine(std::string file)
{
Point2f srcTri[3];
Point2f dstTri[3];
Mat rot_mat(2, 3, CV_32FC1);
Mat warp_mat(2, 3, CV_32FC1);
Mat src, warp_dst, warp_rotate_dst;
// 加载源图像
src = imread(file, 1);
// 设置目标图像的大小和类型与源图像一致
warp_dst = Mat::zeros(src.rows, src.cols, src.type());
// 设置源图像和目标图像上的三组点以计算仿射变换
srcTri[0] = cv::Point2f(0, 0);
srcTri[1] = cv::Point2f(src.cols - 1, 0);
srcTri[2] = cv::Point2f(0, src.rows - 1);
dstTri[0] = cv::Point2f(0, 0);
dstTri[1] = cv::Point2f(src.cols - 1, src.rows * 0.5);
dstTri[2] = cv::Point2f(0, src.rows * 0.5);
// 求得仿射变换
warp_mat = getAffineTransform(srcTri, dstTri);
// 对源图像应用上面求得的仿射变换
warpAffine(src, warp_dst, warp_mat, warp_dst.size());
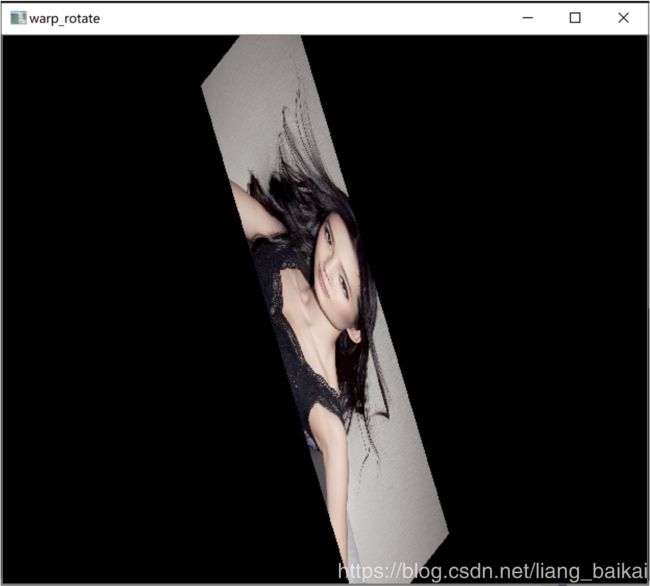
/** 对图像扭曲后再旋转 */
// 计算绕图像中点顺时针旋转50度缩放因子为0.6的旋转矩阵
Point center = Point(warp_dst.cols / 2, warp_dst.rows / 2);
double angle = -50.0;
double scale = 0.6;
// 通过上面的旋转细节信息求得旋转矩阵
rot_mat = getRotationMatrix2D(center, angle, scale);
// 旋转已扭曲图像
warpAffine(warp_dst, warp_rotate_dst, rot_mat, warp_dst.size());
// 显示结果
namedWindow("src", CV_WINDOW_NORMAL);
namedWindow("warp", CV_WINDOW_NORMAL);
namedWindow("warp_rotate", CV_WINDOW_NORMAL);
imshow("src", src);
imshow("warp", warp_dst);
imshow("warp_rotate", warp_rotate_dst);
waitKey(0);
return 0;
}
3. 透视变换
可将矩形图片变换成梯形
根据4组点变换 返回3*3矩阵
CV_EXPORTS Mat getPerspectiveTransform( const Point2f src[], const Point2f dst[] );
/ ** @brief将透视转换应用于图像。
@param src输入图像。
@param dst输出图像,其大小为dsize,并且与src类型相同。
@param M \ f $ 3 \ times 3 \ f $转换矩阵。
@param dsize输出图像的大小。
@param标志插值方法
@param borderMode像素外推方法(#BORDER_CONSTANT或#BORDER_REPLICATE)。
@param borderValue边界不变时使用的值;默认情况下,它等于0。
@sa warpAffine,调整大小,重新映射,getRectSubPix,perspectiveTransform
* /
CV_EXPORTS_W void warpPerspective( InputArray src, OutputArray dst,
InputArray M, Size dsize,
int flags = INTER_LINEAR,
int borderMode = BORDER_CONSTANT,
const Scalar& borderValue = Scalar());
3.1 demo
int MPT_test_warpPerspective(std::string file)
{
Point2f srcTri[4];
Point2f dstTri[4];
Mat warpPerspective_mat(3, 3, CV_32FC1);
Mat src, warpPerspective_dst;
// Load the image
src = imread(file, IMREAD_COLOR);
// Set the dst image the same type and size as src
warpPerspective_dst = Mat::zeros(src.rows, src.cols, src.type());
// 设置四组点,求出变换矩阵
srcTri[0] = Point2f(0, 0);
srcTri[1] = Point2f(src.cols - 1, 0);
srcTri[2] = Point2f(0, src.rows - 1);
srcTri[3] = Point2f(src.cols - 1, src.rows - 1);
dstTri[0] = Point2f(0, src.rows * 0.13);
dstTri[1] = Point2f(src.cols * 0.9, 0);
dstTri[2] = Point2f(src.cols * 0.2, src.rows * 0.7);
dstTri[3] = Point2f(src.cols * 0.8, src.rows);
warpPerspective_mat = getPerspectiveTransform(srcTri, dstTri);
//透视变换
warpPerspective(src, warpPerspective_dst, warpPerspective_mat, src.size());
namedWindow("src", 0);
imshow("src", src);
namedWindow("warpPerspective", 0);
imshow("warpPerspective", warpPerspective_dst);
waitKey(0);
return 0;
}
4. 弯曲
4.1 S形状
int MPT_test_S_change(std::string file) {
double RANGE = 1000;
double PI = 3.1415926;
Mat src = imread(file, IMREAD_COLOR);
Mat dst(src.rows, src.cols, CV_8UC3, Scalar(0));
for (int i = 0; i < dst.rows; i++) {
double temp = (dst.cols - RANGE) / 2 + (dst.cols - RANGE) * sin((2 * PI * i) / dst.rows + PI) / 2;
for (int j = int(temp + 0.5); j < RANGE + temp; j++) {
int m = (int)((j - temp) * (src.cols) / RANGE);
if (m >= src.cols)
m = src.cols - 1;
if (m < 0)
m = 0;
dst.at(i, j)[0] = src.at(i, m)[0];
dst.at(i, j)[1] = src.at(i, m)[1];
dst.at(i, j)[2] = src.at(i, m)[2];
}
}
namedWindow("S形变形", CV_WINDOW_NORMAL);
imshow("S形变形", dst);
cv::waitKey(0);
return 0;
}
4.2 波浪形
int MPT_test_2S_change(std::string file) {
double RANGE = 100;
double PI = 3.1415926;
Mat src = imread(file, IMREAD_COLOR);
Mat dst(src.rows, src.cols, CV_8UC3, Scalar(0));
for (int j = 0; j < dst.cols; j++) {
double temp = RANGE + RANGE * sin(j * PI * 2 / dst.cols);//利用sin函数得到一段正弦波,将图像映射到两个正弦波中即得到波浪形
for (int i = int(temp); i < dst.rows + temp - 2 * RANGE; i++) {
int m = (int)((i - temp) * (src.rows) / (dst.rows - RANGE));
if (m >= src.rows)
m = src.rows - 1;
if (m < 0)
m = 0;
dst.at(i, j)[0] = src.at(m, j)[0];
dst.at(i, j)[1] = src.at(m, j)[1];
dst.at(i, j)[2] = src.at(m, j)[2];
}
}
namedWindow("波浪变形", CV_WINDOW_NORMAL);
imshow("波浪变形", dst);
cv::waitKey(0);
return 0;
}
5. 鱼眼特效
int MPT_test_fish_change(std::string file) {
double PI = 3.1415926;
Mat src = imread(file, IMREAD_COLOR);
cv::resize(src, src, Size(1080, 1080));
Mat dst(src.rows, src.cols, CV_8UC3, Scalar(0));
for (int id = 0; id < dst.rows; id++) {
for (int jd = 0; jd < dst.cols; jd++) {
double xd = jd * 2.0 / dst.cols - 1.0;
double yd = id * 2.0 / dst.cols - 1.0;
double rd = sqrt(xd * xd + yd * yd);
double phid = atan2(yd, xd);
double xs = asin(rd) * 2 / PI * cos(phid);
double ys = asin(rd) * 2 / PI * sin(phid);
int is = round((ys + 1.0) * dst.rows / 2.0);
int js = round((xs + 1.0) * dst.cols / 2.0);
if (is > dst.rows || is < 0 || js>dst.cols || js < 0)
continue;
dst.at(id, jd)[0] = src.at(is, js)[0];
dst.at(id, jd)[1] = src.at(is, js)[1];
dst.at(id, jd)[2] = src.at(is, js)[2];
}
}
cv::resize(dst, dst, Size(1080, 720));
cv::namedWindow("鱼眼特效", CV_WINDOW_NORMAL);
cv::imshow("鱼眼特效", dst);
cv::imwrite("../image/fisheye.jpg", dst);
cv::waitKey(0);
return 0;
}
6. 结构定义
enum BorderTypes {
BORDER_CONSTANT = 0, //!< `iiiiii|abcdefgh|iiiiiii` with some specified `i`
BORDER_REPLICATE = 1, //!< `aaaaaa|abcdefgh|hhhhhhh`
BORDER_REFLECT = 2, //!< `fedcba|abcdefgh|hgfedcb`
BORDER_WRAP = 3, //!< `cdefgh|abcdefgh|abcdefg`
BORDER_REFLECT_101 = 4, //!< `gfedcb|abcdefgh|gfedcba`
BORDER_TRANSPARENT = 5, //!< `uvwxyz|abcdefgh|ijklmno`
BORDER_REFLECT101 = BORDER_REFLECT_101, //!< same as BORDER_REFLECT_101
BORDER_DEFAULT = BORDER_REFLECT_101, //!< same as BORDER_REFLECT_101
BORDER_ISOLATED = 16 //!< do not look outside of ROI
};
enum InterpolationFlags{
/** nearest neighbor interpolation */
INTER_NEAREST = 0,
/** bilinear interpolation */
INTER_LINEAR = 1,
/** bicubic interpolation */
INTER_CUBIC = 2,
/** resampling using pixel area relation. It may be a preferred method for image decimation, as
it gives moire'-free results. But when the image is zoomed, it is similar to the INTER_NEAREST
method. */
INTER_AREA = 3,
/** Lanczos interpolation over 8x8 neighborhood */
INTER_LANCZOS4 = 4,
/** Bit exact bilinear interpolation */
INTER_LINEAR_EXACT = 5,
/** mask for interpolation codes */
INTER_MAX = 7,
/** flag, fills all of the destination image pixels. If some of them correspond to outliers in the
source image, they are set to zero */
WARP_FILL_OUTLIERS = 8,
/** flag, inverse transformation
For example, #linearPolar or #logPolar transforms:
- flag is __not__ set: \f$dst( \rho , \phi ) = src(x,y)\f$
- flag is set: \f$dst(x,y) = src( \rho , \phi )\f$
*/
WARP_INVERSE_MAP = 16
};
结构定义(中文)
enum InterpolationFlags {
/**最近邻插值*/
INTER_NEAREST = 0,
/**双线性插值*/
INTER_LINEAR = 1
/**双三次插值*/
INTER_CUBIC = 2
/**使用像素面积关系重新采样。它可能是图像抽取的首选方法,因为它提供无云纹的结果。但是当图像放大时,它类似于INTER_NEAREST方法。 */
INTER_AREA = 3,
/**在8x8邻域上进行Lanczos插值*/
INTER_LANCZOS4 = 4
/**位精确双线性插值*/
INTER_LINEAR_EXACT = 5
/**内插代码的掩码*/
INTER_MAX = 7
/**标志,填充所有目标图像像素。如果其中一些对应于源图像,它们设置为零*/
WARP_FILL_OUTLIERS = 8
/** 标志,逆变换例如,#linearPolar或#logPolar转换为:-__not__标志未设置:\ f $ dst(\ rho,\ phi)= src(x,y)\ f $-设置了标志:\ f $ dst(x,y)= src(\ rho,\ phi)\ f $ */
WARP_INVERSE_MAP = 16
};
参考文档
参考文档