Python脚本破解图形验证码(tesserocr和pytesseract)
在学习之前,我们先了解OCR、tesseract、tesserocr、pytesseract和opencv这几个跟图片处理有关的库。
OCR(Optical Character Recognition)光学字符识别,是指通过扫描字符,然后通过其形状将其翻译成电子文本的过程。
tesseract是一个OCR,在Windows、Linux和Mac OS下均可安装。
tesserocr 和 pytesseract 是对tesseract封装的一个Python库,可以用来识别图片中的字符。pytesseract是Google的Tesseract-OCR引擎包装器。所以在使用tesserocr和pytesseract之前,我们需要安装tesseract。至于怎么安装我就不说了,网上一搜一大把。
opencv是一个基于BSD许可(开源)发行的跨平台计算机视觉库,也可以用于图片处理。
既然是破解图形验证码,我们就得先了解一下图片的有关知识。
绝大部分图片是 RGB 类型的,即是用RGB(红绿蓝)三原色组成的图片。在图像处理中,用RGB三个分量(R:Red,G:Green,B:Blue),即红、绿、蓝三原色来表示真彩色,R分量,G分量,B分量的取值范围均为0~255,比如电脑屏幕上的一个红色的像素点的三个分量的值分别为:255,0,0
像素点

我们的图片是由一个一个的像素点组成的,像素是图像的最小单元,我们右键——>属性去查看图片的信息,看到图片的尺寸1024*1024

即宽度是1024个像素,高度也是1024个像素,也就是说这张图片是由一个1024 * 1024的像素点矩阵构成的,这个矩阵是1024行,1024列,共有1024 * 1024 = 1048576个像素点。
因为一个像素点的颜色是由RGB三个值来表现的,所以一个像素点矩阵对应三个颜色向量矩阵,分别是R矩阵,G矩阵,B矩阵,它们也都是1024 *1024大小的矩阵。我们可以理解为这张图片是由3个1024*1024的矩阵重和起来的,才形成了这张图片最后的效果。
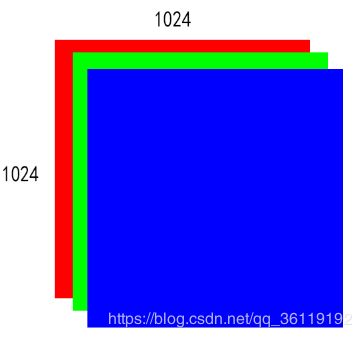
如下:
这个是R矩阵中的一部分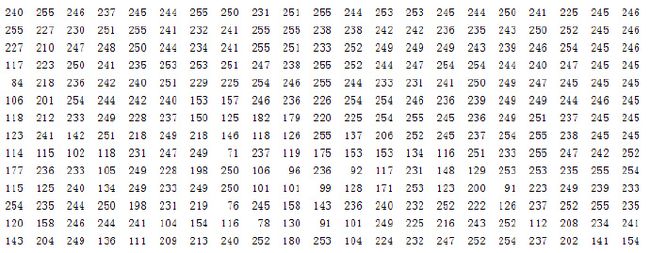
这个是G矩阵中的一部分
这个是B矩阵中的一部分
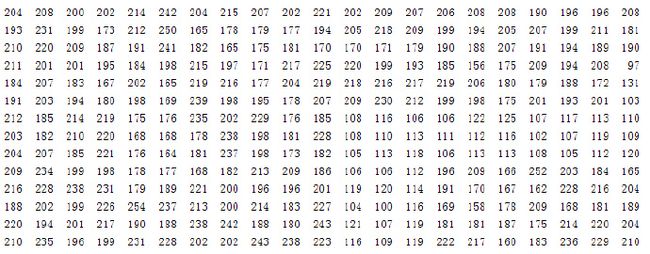
比如每个矩阵的第一行第一列的值分别为:R:240,G:223,B:204,所以这个像素点的颜色就是(240,223,204)。如果图片某个地方显示的是红色,那么这个地方的像素值就是:R:255 G:0 B:0 (255,0,0) 。
图片的灰度化
在理解了一张图片是由一个像素点矩阵构成之后,我们就知道我们对图像的处理就是对这个像素点矩阵的操作,想要改变某个像素点的颜色,我们只要在这个像素点矩阵中找到这个像素点的位置,比如第x行,第y列,所以这个像素点在这个像素点矩阵中的位置就可以表示成(x,y),因为一个像素点的颜色由红、绿、蓝三个颜色变量表示,所以我们通过给这三个变量赋值,来改变这个像素点的颜色,比如改成红色(255,0,0),可以表示为(x,y,(R=255,G=0,B=0))x行y列的像素值为(255,0,0)。
那么什么叫图片的灰度化呢?其实很简单,就是让像素点矩阵中的每一个像素点都满足下面的关系:R=G=B(就是红色变量的值,绿色变量的值,和蓝色变量的值,这三个值相等),此时的这个值叫做灰度值。
一般灰度处理经常使用下面几种方法来进行处理。
方法1 平均值法:
- 灰度化后的R=(处理前的R + 处理前的G +处理前的B)/ 3
- 灰度化后的G=(处理前的R + 处理前的G +处理前的B)/ 3
- 灰度化后的B=(处理前的R + 处理前的G +处理前的B)/ 3
方法2 加权平均法(处理效果最好):
- 灰度化后的R = 处理前的R * 0.3+ 处理前的G * 0.59 +处理前的B * 0.11
- 灰度化后的G = 处理前的R * 0.3+ 处理前的G * 0.59 +处理前的B * 0.11
- 灰度化后的B = 处理前的R * 0.3+ 处理前的G * 0.59 +处理前的B * 0.11
方法3 最大值发:
灰度化后的R、G、B=处理前的R、G、B中的最大值
https://blog.csdn.net/L0_o_0f/article/details/80180111
如下是利用python将图片进行灰度化处理后的效果,直接利用的PIL库Image类的方法(应该用的是方法2来进行灰度化)
from PIL import Image
img=Image.open("1.jpg")
img.convert("L").show() #将图片进行灰度化处理并且显示图片的二值化
什么叫图像的二值化?二值化就是让图像的像素点矩阵中的每个像素点的灰度值为0(黑色)或者255(白色),也就是让整个图像呈现只有黑和白的效果。在灰度化的图像中灰度值的范围为0~255,在二值化后的图像中的灰度值范围是0或者255。
- 黑色:二值化后的R = 二值化后的G = 二值化后的B = 0
- 白色:二值化后的R = 二值化后的G = 二值化后的B = 255
那么一个像素点在灰度化之后的灰度值怎么转化为 0 或者255呢?比如灰度值为120,那么在二值化后到底是0还是255?
这就涉及到取一个阀值的问题。
常用的二值化方法:
方法1:
取阀值为127(相当于0~255的中数),让灰度值小于等于127的变为0(黑色),灰度值大于127的变为255(白色),这样做的好处是计算量小速度快,但是缺点也是很明显的,因为这个阀值在不同的图片中均为127。但是不同的图片,他们的颜色 分布差别很大,所以用127做阀值,效果肯定是不好的。
方法2:
取阀值为计算像素点矩阵中的所有像素点的灰度值的平均值
(像素点1灰度值+...+像素点n灰度值)/ n = 像素点平均值avg
然后让每一个像素点与像素点平均值比较,小于等于avg的像素点就为0(黑色),大于avg的 为255(白色)
方法3:
使用直方图方法(也叫双峰法)来寻找阀值,直方图是图像的重要特质。直方图方法认为图像由前景和背景组成,在灰度直方图上,前景和背景都形成高峰,在双峰之间的最低谷处就是阀值所在。取到阀值之后再一 一比较就可以了。
下面的代码是我们自己写的二值化的处理,我们取得阈值为127。
# 图片二值化
from PIL import Image
img = Image.open('1.jpg')
Img = img.convert('L') #灰度化处理
threshold = 127 #我们自己定义的阈值
table = []
for i in range(256):
if i < threshold:
table.append(0)
else:
table.append(1)
# 图片二值化
photo = Img.point(table, '1')
photo.save("test.jpg") #得到二值化处理后图片test.jpg
Image.open("test.jpg").show() #显示二值化处理后的图片下面是利用opencv库里面的方法来进行二值化处理
import cv2 as cv
import numpy as np
#全局阈值
def threshold_demo(image):
gray = cv.cvtColor(image, cv.COLOR_RGB2GRAY) #把输入图像灰度化
#直接阈值化是对输入的单通道矩阵逐像素进行阈值分割。
ret, binary = cv.threshold(gray, 0, 255, cv.THRESH_BINARY | cv.THRESH_TRIANGLE)
print("threshold value %s"%ret)
cv.namedWindow("binary0", cv.WINDOW_NORMAL)
cv.imshow("binary0", binary)
#局部阈值
def local_threshold(image):
gray = cv.cvtColor(image, cv.COLOR_RGB2GRAY) #把输入图像灰度化
#自适应阈值化能够根据图像不同区域亮度分布,改变阈值
binary = cv.adaptiveThreshold(gray, 255, cv.ADAPTIVE_THRESH_GAUSSIAN_C,cv.THRESH_BINARY, 25, 10)
cv.namedWindow("binary1", cv.WINDOW_NORMAL)
cv.imshow("binary1", binary)
#用户自己计算阈值
def custom_threshold(image):
gray = cv.cvtColor(image, cv.COLOR_RGB2GRAY) #把输入图像灰度化
h, w =gray.shape[:2]
m = np.reshape(gray, [1,w*h])
mean = m.sum()/(w*h) #阈值取平均值
ret, binary = cv.threshold(gray, mean, 255, cv.THRESH_BINARY)
cv.namedWindow("binary2", cv.WINDOW_NORMAL)
cv.imshow("binary2", binary)
src = cv.imread('1.jpg')
cv.namedWindow('input_image', cv.WINDOW_NORMAL) #设置为WINDOW_NORMAL可以任意缩放
cv.imshow('input_image', src)
threshold_demo(src)
local_threshold(src)
custom_threshold(src)
cv.waitKey(0)
cv.destroyAllWindows()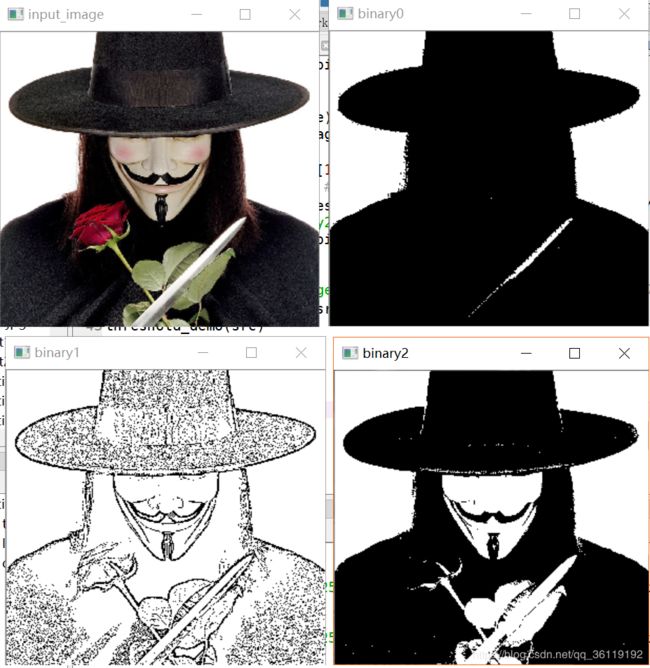
图形验证码破解
未完待续。。。