ubuntu16.04 下ROS操作系统学习笔记(一)ROS-kinetic安装
1.解决VMware运行Ubuntu无法跨系统复制粘贴的问题,需要运行一下三行命令。
$ sudo apt-get autoremove open-vm-tools
$ sudo apt-get install open-vm-tools
$ sudo apt-get install open-vm-tools-desktop2.更新清华大学源,至于如何更新换源网上教程很多,这里给出参考网址[Ubuntu]修改 Ubuntu16.04 源为清华大学,下面为主要步骤。
$ sudo gedit /etc/apt/sources.list下面为更换的内容,对应版本不同需要对应不同的源
# 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释
deb Tsinghua Open Source Mirror xenial main restricted universe multiverse
# deb-src Tsinghua Open Source Mirror xenial main restricted universe multiverse
deb Tsinghua Open Source Mirror xenial-updates main restricted universe multiverse
# deb-src Tsinghua Open Source Mirror xenial-updates main restricted universe multiverse
deb Tsinghua Open Source Mirror xenial-backports main restricted universe multiverse
# deb-src Tsinghua Open Source Mirror xenial-backports main restricted universe multiverse
deb Tsinghua Open Source Mirror xenial-security main restricted universe multiverse
# deb-src Tsinghua Open Source Mirror xenial-security main restricted universe multiverse
# 预发布软件源,不建议启用
# deb Tsinghua Open Source Mirror xenial-proposed main restricted universe multiverse
# deb-src Tsinghua Open Source Mirror xenial-proposed main restricted universe multiverse
$ sudo apt-get update 3.安装ros https://blog.csdn.net/softimite_zifeng/article/details/78632211
添加软件源
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
添加密钥
$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
安装ros
$ sudo apt-get update
$ sudo apt-get install ros-kinetic-desktop-full
初始化rosdp
$ sudo rosdep init
$ rosdep update
ROS环境配置,使得之后每打开一个终端系统都会把ros环境给刷新上。
$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
安装rosinstall等相关软件
$ sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
到这一步ros就是安装完成了。
4. 测试ros:使用roscore命令启动ROS Master
$ roscore
如果出现上图所示界面则表明安装成功。
这里面的ros版本是:1.12.14。
发布版本号是kinetic。
ROS_MASTER_URI=http://zhiqianghe:11311/代表是主机资源地址。这个是由于我们的ros是分布式的系统。所以可能分布在不同主机上面。由于我们的roscore只能存在一个,所以我们其他的机器想要访问的话,我们需要访问这样一个主机资源地址。
默认的安装路径为:/opt/ros/kinetic
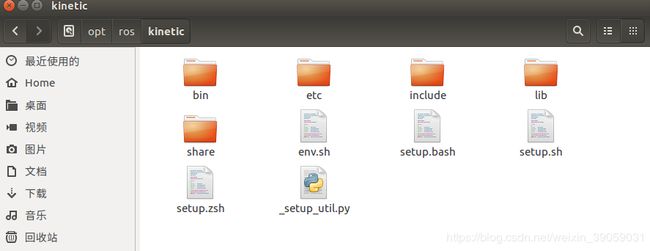
bin文件:里面放置的一般都是一些可执行的文件。在ros系统下面bin文件夹下面都是一些ros可以执行的命令,我们经常在终端下面执行的命令。
etc文件:夹下面主要是一些ros相关的配置文件。
include文件:include下面是通过终端安装的功能包代码的头文件。也就是说我们在创建自己的功能包的时候,可以调用这个文件下已有的功能包的头文件就可以啦。
lib文件夹:文件下下面是一些python文件和一些可执行的文件。lib文件夹下面就是我们通过终端安装的一些可执行包的程序。也就是这些功能包当中的节点。我们运行这些节点就可以启动这些功能包里面相应的功能。
share文件夹:里面也是一些功能包,也是我们通过终端进行安装的。里面有一些cmake的配置文件,还有一些放置了话题消息的一些具体格式。还有一些服务的接口定义。是一些功能包里面的接口信息,如话题,服务等。
我的微信公众号名称:深度学习与先进智能决策
微信公众号ID:MultiAgent1024
公众号介绍:主要研究强化学习、计算机视觉、深度学习、机器学习等相关内容,分享学习过程中的学习笔记和心得!期待您的关注,欢迎一起学习交流进步!