Fusiello极线校正方法的原理及C++实现
在三维重建中,极线校正是很重要的一个环节,其作用就是把左右两个图像的进行变换,使其左右图像的极线左右平行。通俗一点说也就是,使左图像中某一行(或列)中的每一个点,都出现在右图像中对应的行(或列)中。这样做可以极大地减少立体匹配的计算量。
在opencv中其实也是自带了极线校正的API,如stereoRectify()函数,能够很好的进行极线校正。但是这篇文章是对Fusiello极线校正经典方法的介绍,所以就不过多的说opencv里的东西。
Fusiello极线校正方法的原理其实挺简单的,下面是核心代码,对着代码将他的作用。Ps:这里不讲基本的立体几何知识。
原理可以看论文A compact algorithm for rectification of stereo pairs
void mystereoRectify(Mat Po1, Mat Po2,
Vector2d dL, Vector2d dR,
Mat &Tran1, Mat &Tran2,
Mat &Pn1, Mat &Pn2
)
{
Mat c1,c2,X,v1,v2,v3,R1,T1,R2,T2,K1,K2,R;
//分解P矩阵为K,R,T
art(Po1,K1,R1,T1);
art(Po2,K2,R2,T2);
//计算两相机光心坐标
c1 = - Po1.colRange(0,3).inv() * Po1.colRange(3,4);
c2 = - Po2.colRange(0,3).inv() * Po2.colRange(3,4);
v1 = c1-c2;
v2 = R1.rowRange(2,3).t().cross(v1);
v3 = v1.cross(v2);
vconcat(v1.t()/norm(v1),v2.t()/norm(v2),X);
vconcat(X,v3.t()/norm(v3),R);
K.at(0,1)=0;
K1.at(0,2) = K1.at(0,2) + dL(0,0);
K1.at(1,2) = K1.at(1,2) + dL(1,0);
K2.at(0,2) = K2.at(0,2) + dR(0,0);
K2.at(1,2) = K2.at(1,2) + dR(1,0);
hconcat(R, -R*c1, X);
Pn1 = K1 * X;
hconcat(R, -R*c2, X);
Pn2 = K2 * X;
Tran1 = Pn1.colRange(0,3) * Po1.colRange(0,3).inv();
Tran2 = Pn2.colRange(0,3) * Po2.colRange(0,3).inv();
} void mystereoRectify(Mat Po1, Mat Po2, //Po1,Po2分别是左右图像对应的投影矩阵
Vector2d dL, Vector2d dR, //dL和dR是用于设置图像变换过程中的中心平移距离
Mat &Tran1, Mat &Tran2, //Tran1和Tran2是输出
Mat &Pn1, Mat &Pn2 //Pn1和Pn2是左右图像校正后的投影矩阵
) art(Po1,K1,R1,T1);//分解投影矩阵P为K本质矩阵,R旋转矩阵,T平移矩阵
art(Po2,K2,R2,T2); c1 = - Po1.colRange(0,3).inv() * Po1.colRange(3,4);//计算出两个相机坐标的光心坐标
c2 = - Po2.colRange(0,3).inv() * Po2.colRange(3,4); v1 = c1-c2; //以c1和c2的连线作为新的X轴
v2 = R1.rowRange(2,3).t().cross(v1); //用新的X轴和原来的Z轴叉乘计算出新的Y轴
v3 = v1.cross(v2); //用新的X轴和Y轴叉乘计算出新的Z轴
vconcat(v1.t()/norm(v1),v2.t()/norm(v2),X);//合并成新的旋转矩阵R
vconcat(X,v3.t()/norm(v3),R); K1.at(0,1)=0;
K2.at(0,1)=0;
K1.at(0,2) = K1.at(0,2) + dL(0,0); //按照输入的dL和dR中的平移值修改K矩阵中的cx和cy
K1.at(1,2) = K1.at(1,2) + dL(1,0); //从而实现图像的平移
K2.at(0,2) = K2.at(0,2) + dR(0,0); //主要的目的是尽量让变换后的图像保持在图像中心,
K2.at(1,2) = K2.at(1,2) + dR(1,0); //避免变换后损失过多的图像 hconcat(R, -R*c1, X);//根据新的本质矩阵K和旋转矩阵计算出新的投影矩阵,平移矩阵T不变
Pn1 = K1 * X;
hconcat(R, -R*c2, X);
Pn2 = K2 * X; Tran1 = Pn1.colRange(0,3) * Po1.colRange(0,3).inv();//分别计算出左右两图的校正矩阵
Tran2 = Pn2.colRange(0,3) * Po2.colRange(0,3).inv();校正结果如下:
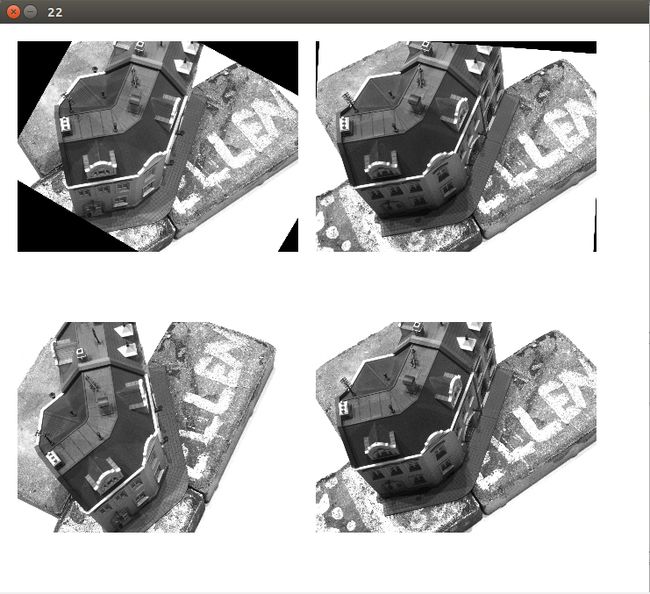
上面两个是极线校正后的图像,下面两个是原图像。
效果还是不错的,这个Fusiello极线校正方法虽然很简单,但是也存在一定的BUG,我发现一个就是必须要保证输入的左图像为真实的左图像,具体点说,就是左右两张图像不能颠倒,左图像必须是在现实中的左边拍的照,右图像必须是在现实物体右边拍的照。调转了就会导致校正后的图像完全颠倒过来,原因呢也想过,主要是因为左右图像调转后光心也左右互换,然后校正的x轴与正常放置校正的x轴是完全相反的,所以会导致图像的颠倒。
完整的源码下载链接:http://download.csdn.net/download/fsencen/10268864