Linux下s3c-2410开发环境的搭建
本博客主要内容参照了s3c-2410开发光盘中的2410-S实验指导书@2006.11.pdf,文档位于光盘下linux/doc目录中, 在配置的过程中遇到了不少问题, 花了一天时间才配置完成, 为了防止自己忘记, 所以记录一下,以此缅怀。s3c-2410实验指导书下载 http://download.csdn.net/detail/gatieme/7105979
tftp烧写linux内核文档下载 http://download.csdn.net/detail/gatieme/7105963
s3c-2410快速开发手册 http://download.csdn.net/detail/gatieme/7105947
1开发工具软件的安装
将博创兴业科技有限公司提供的附带开发工具光盘插入CDROM,然后执行以下命令:
mount /dev/cdrom /mnt
若系统不识别/dev/cdrom 的话,可以用如下命令,假设CDROM 为从盘,即为/dev/hdb,则:
mount –t iso9660 /dev/hdb /mnt
然后进入到光盘目录下, 执行install.sh安装脚本,这样开发环境就会被建立
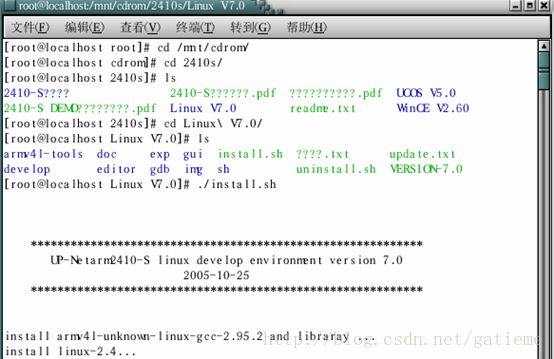
安装脚本程序将自动建立/arm2410s 目录,并将所有开发软件包安装到/arm2410s 目录下,
同时自动配置编译环境,建立合适的符号连接
注意: 安装完成后看一下主编译器Armv4l-unknown-linux-gcc 是否在
/opt/host/armv4l/bin/,如果不是这个路径,请使用vi 修改/root/.bash_profile 文件中PATH
变量为PATH=$PATH:$HOME/bin:/opt/host/armv4l/bin/ , 存盘后执行: source
/root/.bash_profile,则以后armv4l-unknown-linux-gcc 会自动搜索到,可以在终端上输入
armv,然后按tab 键,会自动显示armv4l-unknown-linux-
2Linux 开发软件的安装目录结构
/arm2410s 下的文件说明
*********************************************************************************
* busybox-1.00-pre10 Busybox-1.00 源代码
*********************************************************************************
* doc arm2410-S linux 使用说明书
*********************************************************************************
* Qt Qt 应用程序和库的源代码
*********************************************************************************
* insight-6.0 Linux 下源代码查看器
*********************************************************************************
* root 2410-S平台根文件系统
*********************************************************************************
* kernel-2410s 2410-S平台linux 内核源代码
*********************************************************************************
* demos 所有实验演示程序
*********************************************************************************
* vivi 系统引导程序
*********************************************************************************
* zImage ARMLINUX-2.4 内核压缩映象文件
*********************************************************************************
* root.cramfs 根文件系统映象文件
*********************************************************************************
* img 内核镜像
*********************************************************************************
* yaffs.tar.bz2 demos 演示程序的压缩文件
*********************************************************************************
* exp 实验例程源码
*********************************************************************************sh脚本信息描述
*********************************************************************************
* mount-dos.sh linux 下挂装windows 的分区示例脚本
*********************************************************************************
* mnt_udisk.sh MOUNT U 盘
*********************************************************************************
* mkroot.sh 制作根文件系统的脚本
*********************************************************************************编译器安装路径所示:
*********************************************************************************
arm-elf-gcc-2.95.3 /opt/host/armv4l 应用开发库和头文件
*********************************************************************************
Armv4l-unknown-linux-gcc /opt/host/armv4l/bin 主编译器
*********************************************************************************3安装和配置超级终端minicom
下载此链接http://download.csdn.net/detail/gatieme/7105653下的minicom安装包,由于minicom依赖于lrzsz, 因此我们里面也附带了lrzsz的安装包(该安装包为rpm包, 仅限于RedHat和使用RedHat同类内核的Linux系统如CentOS)
依次执行
rpm -ivh lrzsz-0.12.20-27.fc12.i686.rpm
rpm -ivh minicom-2.2-5.fc8.i386.rpm
安装完毕后进行配置...
4配置主机与arm板的共享目录
配置信息
修改/etc/exports 文件,其格式如下:
共享目录 可以连接的主机(读写权限,其他参数)
例如:
/arm2410s 192.168.81.*(rw,sync)表示将本机的/arm2410s 目录共享给ip 地址为192.168.81.1-192.168.81.254 的所有计算机,可以读取和写入。
配置完成后,可用如下办法简单测试一下NFS 是否配置好了:在宿主机上自己mount 自己,
看是否成功就可以判断NFS 是否配好了。
例如在宿主机/目录下执行:
mount 192.168.81.32:/arm2410s /mnt
ls /mnt其中192.168.0.10 应为主机的IP 地址。
然后到/mnt/目录下看是否可以列出/arm2410s 目录下的所有文件和目录,可以则说明
mount 成功,NFS 配置成功。
说明
我们配置共享目录主要目的在于, 连接上arm板以后, 将主机与arm配置为同一网段, 就可以将主机上的共享磁盘分区直接挂载到arm板上, 这样省去我们来来回回传送文件的麻烦, 主机上和arm板上对共享目录的修改是同步的。
其挂载命令参照下面的信息
Mount -t nfs 192.168.81.32:/home/gatieme/arm /host就将我们主机(IP192.168.81.32)上的共享文件目录/home/gatieme/arm挂载到了2410上/host目录下, 这样我们进去/host目录下,就等同于进入到/home/gatieme/arm目录下
在配置过程中,需要注意
① 为了保证arm板和主机的连接顺畅, 最好将防火墙全部禁止, 同时关闭selinux
② 每次修改了/etc/exports文件后一定要重启nfs服务器
③ 必须保证主机和arm板网络在同一网段, 且必须ping通
至此开发环境就配置好了,
我们连接好s3c-2410后,将共享目录挂载到arm板上,这样我们就可以在主机和arm板上进行嵌入式编程了
至此开发环境就配置好了,
我们连接好s3c-2410后,将共享目录挂载到arm板上,这样我们就可以在主机和arm板上进行嵌入式编程了
对于在mount过程中可能出现的各种错误,我进行了总结,
详细信息请参照,另外一篇博文http://blog.csdn.net/gatieme/article/details/22273425