深度解析OPENAI-MADDPG
Zee带你看RL代码系列
学习强化学习,码代码的能力必须要出众,要快速入门强化学习 搞清楚其中真正的原理,读源码是一个最简单的最直接的方式。最近创建了一系列该类型文章,希望对大家有多帮助。
另外,我会将所有的文章及所做的一些简单项目,放在
文章目录
- Zee带你看RL代码系列
- 深度解析MADDPG
- MADDPG原理
- 程序架构
- ENV 部分
- 具体子环境
- Make_World
- reset world
- 此外此函数中定义奖励 和 观察
- Environment
- Trainer
- P_train 主要是为了建立actor
- Q_train 建立critic
- 主体部分 MADDPGAgentTrainer
- 参数 以及 分布
- PdType
- Pd
深度解析MADDPG
MADDPG原理
OpenAI 2017论文《Multi-Agent Actor-Critic for Mixed Cooperative-Competitive Environments》
知乎已经比较详细介绍了
本文主要分析该开源程序的架构。
该程序主要是对 文章中的environment的实验进行房展
在试验中 存在 agent 和landmarks
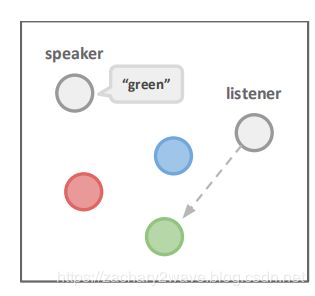
实验一:speak 不能动 但是可以看,listener说一个颜色 listener 就到一个颜色的landmark上去
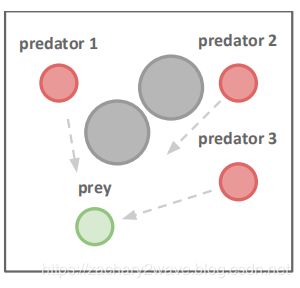
实验二:在这种经典的捕食者-食饵游戏变体中,N个较慢的Predator在Landmark阻碍下追赶速度更快的Prey
每一个Predator碰撞到prey,代理人得到奖励,而对手受到惩罚。
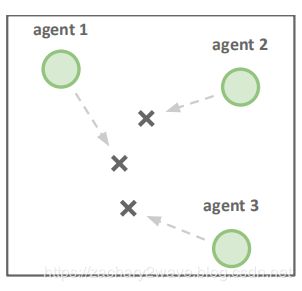
实验三 agent必须通过进行合作,以达到Landmark。必须躲避其他agent 到达相同的地标。
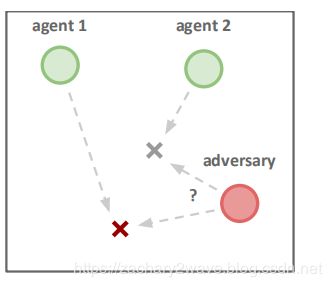
实验四:N个agent要到N个landmark上去,然而,一个adversary也希望到达目标地标,这个adversary不知道哪个地标是正确的。agent 根据adversary到正确地点的距离受到负reward。
算法github
环境github
程序架构
强化学习的主要两个部分即 环境 和 算法
环境 主要是通过 主函数中 make-env创建
def make_env(scenario_name, arglist, benchmark=False):
from multiagent.environment import MultiAgentEnv
import multiagent.scenarios as scenarios
# load scenario from script
scenario = scenarios.load(scenario_name + ".py").Scenario()
# create world
world = scenario.make_world()
# create multiagent environment
if benchmark:
env = MultiAgentEnv(world, scenario.reset_world, scenario.reward, scenario.observation, scenario.benchmark_data)
else:
env = MultiAgentEnv(world, scenario.reset_world, scenario.reward, scenario.observation)
return env
算法 主要是通过主函数中 get_trainers创建
def get_trainers(env, num_adversaries, obs_shape_n, arglist):
trainers = []
model = mlp_model
trainer = MADDPGAgentTrainer
for i in range(num_adversaries):
trainers.append(trainer(
"agent_%d" % i, model, obs_shape_n, env.action_space, i, arglist,
local_q_func=(arglist.adv_policy=='ddpg')))
for i in range(num_adversaries, env.n):
trainers.append(trainer(
"agent_%d" % i, model, obs_shape_n, env.action_space, i, arglist,
local_q_func=(arglist.good_policy=='ddpg')))
return trainers
在每一次迭代中,都会计算所有agent的动作
然后将所有agent的动作送入 step ,并得到reward ,在这里reward对agent都是相同的。
每一个agent都拥有自己的经验池,并将所有的都进行更新。
同样每次都对所有的agent都运行一遍update
ENV 部分
[外链图片转存失败(img-Axl8rtat-1566778968182)(./image/Scenarios( Multiagent文件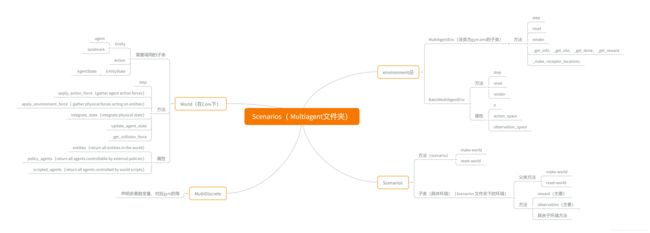 夹).png)]
夹).png)]
在ENV的部分调用过程中,都是通过调用具体环境,即Scenario下的子类环境,然后用该场景下的两个方法
Make-world 和 reset-world。创建具体的环境。
总体流程是
- 调用环境 make-env(train)
- 具体环境建立
- Make-world 创建 agent 初始化各个agent
- reset-world初始化各个agent
- 创建env
- 为每个agent创建 状态-动作空间
- step 和reward等环境
具体子环境
Make_World
创建过程中
1、循环调用core中的agent 向 world 中增加 agent 和 landmark
agent 包含以下参数
- movable: True or Flase 可以不可以移动
- silent :True or Flase 可以不可以交流
- Bline :True or Flase 可以不可以观察
- Unoise、Cnoise :True or Flase U动作噪声 C 交流噪声
- state 状态
- action 动作
2、world 中定义了 agent运动的基本方式,主要利用两个函数
- apply_action_force: 将动作加上噪声
- apply_environment_force :将agent的 运动 加在状态上,需要通过get_collision_force判断是不是碰撞
- integrate_state : 求积分 更改 将速度增加在 P上
- update_agent_state:将交流动作加上噪声
reset world
利用循环将各个agent 的动作 通信动作 初始化
此外此函数中定义奖励 和 观察
Environment
将world 输入到 MultiagentEnv或者BatchMultiAgentEnv 以创建
该函数的输入是
world=Scenario.make_world()
reset_callback=scenario.reset_world,
reward_callback=scenario.reward,
observation_callback= scenario.observation,
info_callback=scenario.done
done_callback=None,
shared_viewer=True
该环境下存在 reset 和 step函数
该step也是调用 world 下的 step , 但是该处的step可以确定agent的动作顺序
for i, agent in enumerate(self.agents):
self._set_action(action_n[i], agent, self.action_space[i])
Trainer
在这里每一个agent都需要建立一个trainer ,然后添加在在trainer list中
trainer(name = "agent_%d" % i, model = model,
obs_shape_n = [env.observation_space[i].shape for i in range(env.n)]
# env.n 是agent的个数 这个地方传进去一个list
env.action_space = env.action_space,i = agent的序号,arglist=None
local_q_func = (arglist.adv_policy=='ddpg'))
其中最主要关注的是model,obs_shape_n, env.action_space
其中输入model是一个 网络,这个网络即是critic 又是actor
def mlp_model(input, num_outputs, scope, reuse=False, num_units=64, rnn_cell=None):
with tf.variable_scope(scope, reuse=reuse):
out = input
out = layers.fully_connected(out, num_outputs=num_outputs, activation_fn=None)
return out
**Trainer **主要包含
一个类:MADDPGAgentTrainer 在该类中调用P—train,Q—trian,利用function来建立所利用的函数。
四个子函数:
- P—train
- Q—trian
- discount_with_dones
- make_update_exp
主要是依赖于tensorflow的function建立的
P_train 主要是为了建立actor
总体思路流程是 建立actor 建立 critic 然后将critic 的输出 和 actor输出 当做loss 来训练actor
self.act, self.p_train, self.p_update, self.p_debug = p_train(scope=self.name,
make_obs_ph_n = obs_ph_n, act_space_n = act_space_n,
# 所有agent的状态空间 一个个tensor 所有agent的动作空间(list)
p_index=agent_index,
p_func = model, q_func = model,
# 创建actor 和 critic
optimizer=tf.train.AdamOptimizer(learning_rate=args.lr), # 优化算法
grad_norm_clipping=0.5,
# 梯度修剪
local_q_func=local_q_func, num_units=args.num_units)
程序流程
将动作空间创建为概率分布。
为动作空间的概率分布和状态空间生成placeholder
生成actor P P P 并得到$ P$ 可训练函数
p = p_func(p_input,(状态的placeholder),
int(act_pdtype_n[p_index].param_shape()[0]),
scope="p_func", num_units=num_units)
p_func_vars = U.scope_vars(U.absolute_scope_name("p_func"))
这个地方P 是一个 输出层的tensor
根据 P P P 输出的分布 采样 得到动作
并计算动作的均值 生成P-reg
act_pd 是把p这个function 传到其中,然后flatparam 又把这个地方取出来 然后 平方根 然后 求平均? 这个地方为什么要sample 两边??
之后,将actor生成的action 与 状态 节课 送进去 生成 Q critic 。
并将q的输出求均值 然后 得到总LOSS
loss = pg_loss + p_reg * 1e-3
然后得到了 critic 部分 即 训练函数 train ,该函数是 输入是 状态和 动作 输出是loss
train = U.function(inputs=obs_ph_n + act_ph_n, outputs=loss, updates=[optimize_expr])
同时也得到了act部分 即 训练函数 act
在该函数下 同样生成target 网络 ,生成方式与 p的生成方式是一样的都是利用model
更新target网络用的是
update_target_p = make_update_exp(p_func_vars, target_p_func_vars)
所以最终生成3个函数 act(actor)、train(critic) 、update_target_p(更新actor)
Q_train 建立critic
形式与P_trian一样 建立 critic 然后建立 traget critic 其Loss 表示为
如果用本地Q函数的时候 loss 利用本地数据
loss = tf.reduce_mean(tf.square(q - target_ph))
建立train的时候,不论是不是输入的 是不是 local 但是都是利用 全局数据
train = U.function(
inputs=obs_ph_n + act_ph_n + [target_ph],
outputs=loss,
updates=[optimize_expr])
q_values = U.function(obs_ph_n + act_ph_n, q)
Train 也输出的是Loss 而不是Q值 .
其他与之前类似。
主体部分 MADDPGAgentTrainer
利用p-train 创建actor 利用Q train 创建critic 调用replay buffer 创建经验回放池
利用经验回放来收集数据
self.replay_buffer.add(obs, act, rew, new_obs, float(done))
update
在更新的时候先计算每一个样本的target q 然后输入 Q和P的train 训练。
参数 以及 分布
在train开始的时候,程序把不同种类的动作建立成了各种不同的分布。 最后的动作输出的是分布,根据分布最后采样得到输出值。
- Box 连续空间->DiagGaussianPdType (对角高斯概率分布)
- Discrete离散空间->SoftCategoricalPdType(软分类概率分布)
- MultiDiscrete连续空间->SoftMultiCategoricalPdType (多变量软分类概率分布)
- 多二值变量连续空间->BernoulliPdType (伯努利概率分布)
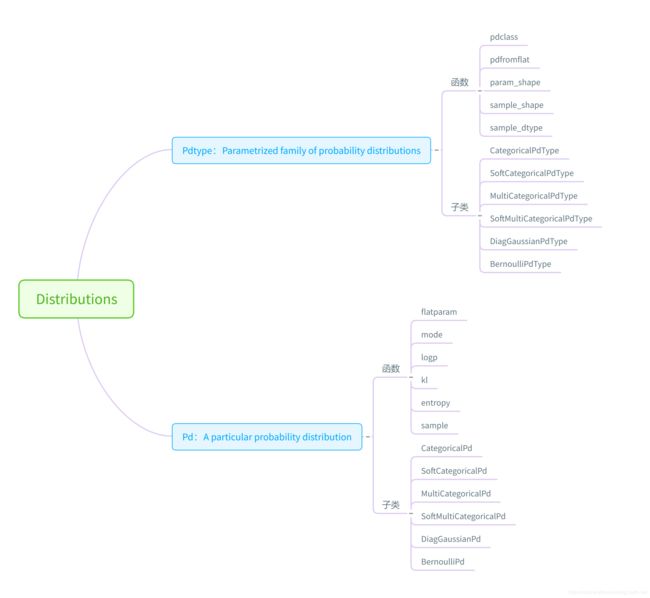
PdType
一个大类 下面有5个可以被继承函数 和5个子类
| name | Box | Discrete | MultiDiscrete | MultiBinary | 暂时没有对应 | 暂时没有对应 |
|---|---|---|---|---|---|---|
| pdclass(返回的是类) | DiagGaussianPd | SoftCategoricalPd | SoftMultiCategoricalPd | BernoulliPd | CategoricalPdType | MultiCategoricalPdType |
| pdfromflat(返回带输入的类) | pdclass()(flat) | pdclass()(flat) | 带有low 和 high的参数的Pdclass | pdclass()(flat) | pdclass()(flat) | 带有low 和 high的参数的Pdclass |
| param_shape | 2倍输入变量size | size | size | size | size | size |
| sample_shape | size | size | size | size | size | size |
| sample_dtype | tf.float32 | tf.float32 | tf.float32 | tf.int32 | tf.int32 | tf.int32 |
子函数必须有的函数
-
sample_placeholder
为创建图中的placeholder
-
param_placeholder
为 创建图中的placeholder
Pd
| CategoricalPd | SoftCategoricalPd | MultiCategoricalPd | SoftMultiCategoricalPd | DiagGaussianPd | BernoulliPd | |
|---|---|---|---|---|---|---|
| init | 输入tensor | 输入tensor | 从tensor 分离出均值 和 方差 | 计算sigmoid(tensor) | ||
| flatparam | 返回输入tensor | 返回输入tensor | 返回输入tensor | 返回输入tensor | ||
| logp | 返回tensor中最大的那个的位置 | 输出softmax(输入tensor) | 返回均值 | 使变量变0 或者变1 | ||
| logp | 计算稀疏softmax交叉熵 | 计算稀疏softmax交叉熵 | 计算稀疏softmax交叉熵 | 计算稀疏softmax交叉熵 | 计算稀疏softmax交叉熵 | 计算稀疏softmax交叉熵 |
| KL | 计算与目标的KL散度 | 计算与目标的KL散度 | 计算与目标的KL散度 | 计算与目标的KL散度 | 计算与目标的KL散度 | 计算与目标的KL散度 |
| entropy | 交叉熵 | 交叉熵 | 交叉熵 | 交叉熵 | 交叉熵 | 交叉熵 |
| sample | 输入tensor 采样 | 输入tensor 采样 | 输入tensor 采样 | 输入tensor 采样 | 输入tensor 采样 | 输入tensor 采样 |