YOLO-v3边框预测与回归
YOLO-v3边框预测与回归
- 模型说明
- yolo层前面的conv计算output参数说明
- yolo层Inference和回归计算
- yolo层计算和训练
- Logistics计算:
- 检测框坐标计算:
- IOU计算:
- 计算梯度Δ值:
我们读yolov3论文时都知道边框预测的公式,然而难以准确理解为何作者要这么做,这里我依据Darknet代码来总结解释一下个人的见解,总结串联一下学习时容易遇到的疑惑,期待对大家有所帮助,理解错误的地方还请大家批评指正,我只是个小白哦,发出来也是为了与大家多多交流,看看理解的对不对。
模型说明
假设模型如下所示,下面的分析在此模型基础上:
layer filters size/stride input output
0 conv 16 3 x 3 / 1 512 x 512 x 3 -> 512 x 512 x 16 0.226 BFLOPs
1 max 2 x 2 / 2 512 x 512 x 16 -> 256 x 256 x 16
2 conv 32 3 x 3 / 1 256 x 256 x 16 -> 256 x 256 x 32 0.604 BFLOPs
3 max 2 x 2 / 2 256 x 256 x 32 -> 128 x 128 x 32
4 conv 64 3 x 3 / 1 128 x 128 x 32 -> 128 x 128 x 64 0.604 BFLOPs
5 max 2 x 2 / 2 128 x 128 x 64 -> 64 x 64 x 64
6 conv 64 3 x 3 / 1 64 x 64 x 64 -> 64 x 64 x 64 0.302 BFLOPs
7 max 2 x 2 / 2 64 x 64 x 64 -> 32 x 32 x 64
8 conv 64 3 x 3 / 1 32 x 32 x 64 -> 32 x 32 x 64 0.075 BFLOPs
9 max 2 x 2 / 1 32 x 32 x 64 -> 32 x 32 x 64
10 conv 64 1 x 1 / 1 32 x 32 x 64 -> 32 x 32 x 64 0.008 BFLOPs
11 conv 30 1 x 1 / 1 32 x 32 x 64 -> 32 x 32 x 30 0.004 BFLOPs
12 yolo
cfg文件中的yolo层参数设置:
[yolo]
mask = 1,2,3 #使用anchor的索引, 1,2,3表示使用下面定义的anchors中的2,3,4个anchor
anchors = 10,14, 23,27, 37,58, 81,82, 135,169, 344,319
classes=5 #类别数目
num=6
jitter=.3 #数据增强手段,此处jitter为随机调整宽高比的范围
ignore_thresh = .7 #计算IOU阈值大小.当预测的检测框与ground true的IOU大于ignore_thresh的时候,参与loss的计算,否则,检测框的不参与loss计算。
truth_thresh = 1
random=1
yolo层前面的conv计算output参数说明
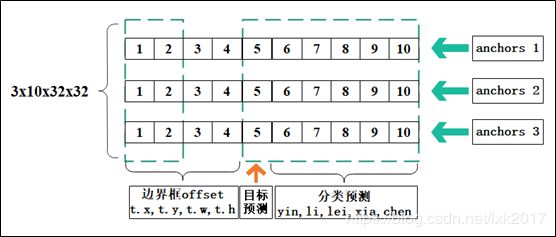
yolov3模型中,yolo层前面一层的卷积核个数为3*(4+1+classes),人脸识别模型最后一层conv卷积核个数为3*(4+1+5)=30,五个类:yin,li,lei,xia,chen,之所以这样设置,会在下面说明。由上面模型可以看出,11 conv层计算结果为32x32x30个参数,这些计算出来的参数所代表的含义如下如所示:

前四个[1,2,3,4]为边界框预测,经过计算得到的b.x,b.y,b.w,b.h与数据集中的label标签对应,标签数据如下图,第5个为目标(object)预测,最后6,7,8,9,10是分类预测,每一组代表一类。
yolo层Inference和回归计算
流程图如下:

yolo层计算和训练
Logistics计算:
该部分只针对[1、2、5、6、7、8、9、10]做计算,[3、4]不做计算,后面会说明[3、4]不做计算:

对应代码:
for (b = 0; b < l.batch; ++b){
for(n = 0; n < l.n; ++n){
int index = entry_index(l, b, n*l.w*l.h, 0);
activate_array(l.output + index, 2*l.w*l.h, LOGISTIC);
index = entry_index(l, b, n*l.w*l.h, 4);
activate_array(l.output + index, (1+l.classes)*l.w*l.h, LOGISTIC);
}
}
检测框坐标计算:
检测框坐标(b_x,b_y,b_w,b_h),分别指(中心点x,中心点y,宽w,高h),坐标计算公式如下:

其中tx,ty,tw,th是一系列conv计算得到的值,cx,cy为feature map中的坐标,feature map大小为32x32,则(cx,cy)为(0,0)到(31,31)1024个点,p_w,p_h为cfg中anchors尺寸,上图cfg中的anchors 1,anchors 2,anchors 3分别为23,27, 37,58, 81,82 ,到此,已经计算出我们预测的框的坐标了。

代码:
box get_yolo_box(float *x, float *biases, int n, int index, int i, int j, int lw, int lh, int w, int h, int stride)
{
box b;
b.x = (i + x[index + 0*stride]) / lw;
b.y = (j + x[index + 1*stride]) / lh;
b.w = exp(x[index + 2*stride]) * biases[2*n] / w;
b.h = exp(x[index + 3*stride]) * biases[2*n+1] / h;
return b;
}
IOU计算:
计算出每个feature map单元所对应的预测框位置和大小,就可以与ground truth 对比,计算IOU:
下面图示IOU=area/(area1+area2-area)

计算梯度Δ值:
PS:这里有一个问题,不管FasterRCNN还是YOLO,都不是直接回归bounding box的长宽(就像这样b_w=p_w t_w’),而是要做一个对数变换,实际预测的是log(⋅)。这是因为如果不做变换,直接预测相对形变t_w’, 那么要求t_w^’>0,因为框的长宽不可能是负数。这样,是在做一个有不等式条件约束的优化问题,没法直接用SGD来做。所以先取一个对数变换,将其不等式约束去掉,就可以了。
梯度Δ值的计算与预测框坐标的计算相反,对于前四组x、y、w、h来说:

其中G_x,G_y, G_w, G_h是label标签里面的值,就是ground truth的值,p_w,p_h分别为23,27, 37,58, 81,82。

scale为(2-truth.w*truth.h)。
float delta_yolo_box(box truth, float *x, float *biases, int n, int index, int i, int j, int lw, int lh, int w, int h, float *delta, float scale, int stride)
{
box pred = get_yolo_box(x, biases, n, index, i, j, lw, lh, w, h, stride);
float iou = box_iou(pred, truth);
float tx = (truth.x*lw - i);
float ty = (truth.y*lh - j);
float tw = log(truth.w*w / biases[2*n]);
float th = log(truth.h*h / biases[2*n + 1]);
delta[index + 0*stride] = scale * (tx - x[index + 0*stride]);
delta[index + 1*stride] = scale * (ty - x[index + 1*stride]);
delta[index + 2*stride] = scale * (tw - x[index + 2*stride]);
delta[index + 3*stride] = scale * (th - x[index + 3*stride]);
return iou;
}
对于第五组object回归来说:best_iou>l.ignore_thresh,Δobj=0,否则Δobj=0-l.output。另外,YOLO会对每个bounding box给出是否是object的置信度预测,用来区分objects和背景。这个值使用logistic回归。当某个bounding box与ground truth的IoU大于其他所有bounding box时,target给1;如果某个bounding box不是IoU最大的那个,但是IoU也大于了某个阈值(我们取0.7),那么我们忽略它(既不惩罚,也不奖励),这个做法是从Faster RCNN借鉴的。我们对每个ground truth只分配一个最好的bounding box与其对应(这与Faster RCNN不同)。如果某个bounding box没有被分配到任何一个ground truth对应,那么它对边框位置大小的回归和class的预测没有贡献,我们只惩罚它的objectness,即试图减小其confidence。

对于后面5个class组来说,如果预测框是该类,则Δc=1-l.output,否则Δc=0-l.output.
代码:
void delta_yolo_class(float *output, float *delta, int index, int class, int classes, int stride, float *avg_cat)
{
int n;
if (delta[index]){
delta[index + stride*class] = 1 - output[index + stride*class];
if(avg_cat) *avg_cat += output[index + stride*class];
return;
}
for(n = 0; n < classes; ++n){
delta[index + stride*n] = ((n == class)?1 : 0) - output[index + stride*n];
if(n == class && avg_cat) *avg_cat += output[index + stride*n];
}
}
到此,32x32x30个值都已经计算出梯度Δ值,在训练的时候,使用平方误差损失。利用梯度Δ值可以计算出square error,并且使用梯度可以进行反向传播backward_yolo,更新网络: