基于ZYNQ的中断的使用(1)
基于ZYNQ的软中断的使用
- 参考文献
- 项目简述
- ZYNQ中断描述
- PL端设计
- PS端设计
- CPU0代码
- CPU1代码
- 测试结果
- 总结
参考文献
[1]、V3学院
[2]、 judyzhong
项目简述
接触过单片机、ARM的同学应该都了解中断,因为这是保证CPU实时性的前提。学到这里的同学会不免发出疑惑,为什么FPGA没事有实时性的要求呢,因为FPGA本身就是并发执行,这也是其本身最重要的特性。ZYNQ中有两个CPU,又分为不同的中断类型,将在下面的文章中一一介绍。如果学不会中断,那么ZYNQ的学习将没有意义。
工程描述:运行ZYNQ的两个ARM核,利用ZYNQ的软中断,用CPU0中断CPU1,同时CPU1中断CPU0。
本次实验所用到的软硬件环境如下:
1、VIVADO 2019.1
2、米联客MZ7015FA开发板
ZYNQ中断描述
ZYNQ中的中断主要包括三种类型,如下:
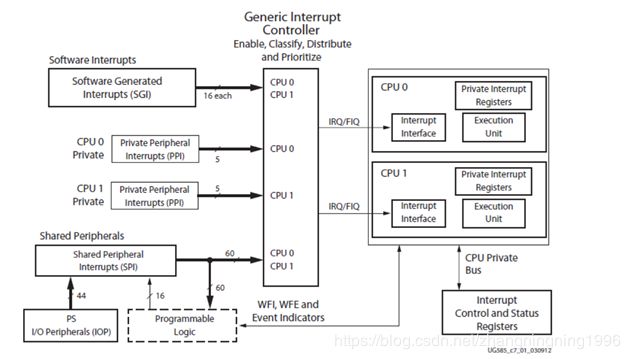
从上面可以看出三种终端类型包括:
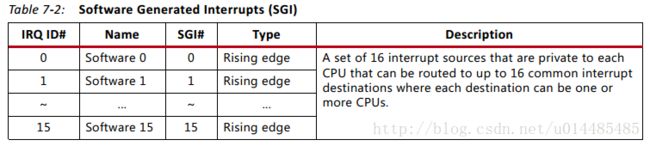
1.软件中断(SGI,Software generatedinterrupts,中断号0-15)(16–26 reserved) :被路由到一个或者两个CPU上,通过写ICDSGIR寄存器产生SGI.
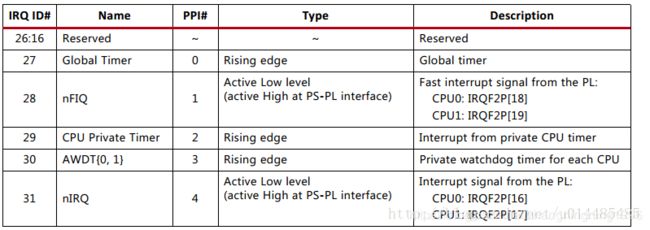
2.私有外设中断(PPI,private peripheralinterrupts ,中断号27-31):每个CPU都有一组PPI,包括全局定时器、私有看门狗定时器、私有定时器和来自PL的FIQ/IRQ.
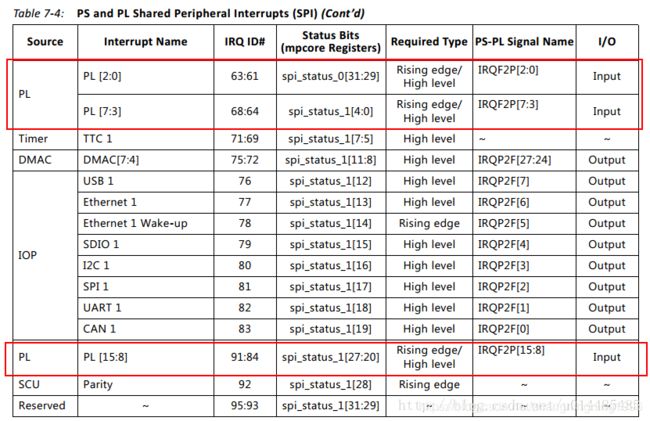
3.共享外设中断(SPI,shared peripheralinterrupts,中断号32-95):由PS和PL上的各种I/O控制器和存储器控制器产生,这些中断信号被路由到相应的CPU. 其中共享中断包括外设中断和PL中断
中断控制器(GIC,generic interrupt controller ):用于集中管理从PS和PL产生的中断信号的资源集合。控制器可以使能、关使能、屏蔽中断源和改变中断源的优先级,并且会将中断送到对应的CPU中,CPU通过私有总线访问这些寄存器。
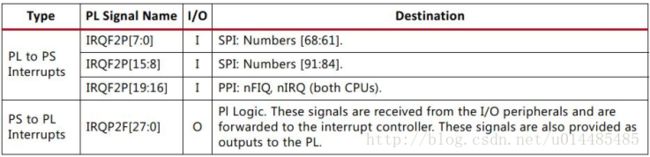
PL和PS之间的中断有:
两个CPU都具有各自16个软件中断,CPU可以中断自己,也可以中断其他CPU,上升沿触发,不可修改
CPU的私有中断,这些中断都是固定死的,不能修改:
共享中断就是一些端口共用一个中断请求线, PL部分有16个共享中断,他们的触发方式可以设置
这些中断的使用在接下来的文章中都会进行相应的讲解,本篇文章我们主要讲解软中断,软中断CPU可以中断自己,也可以中断其他CPU,上升沿触发,不可修改。
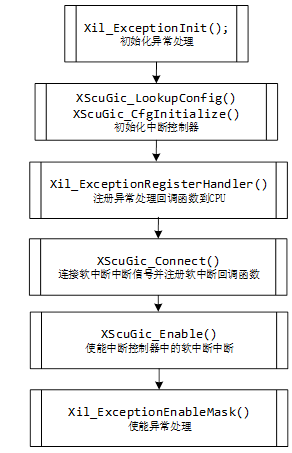
ZYNQ中断的整个注册流程如下,上面三种类型的中断都遵循下面的过程,只是稍许细节不一样,详细的情况可以观察我们下面给出的代码:
PL端设计
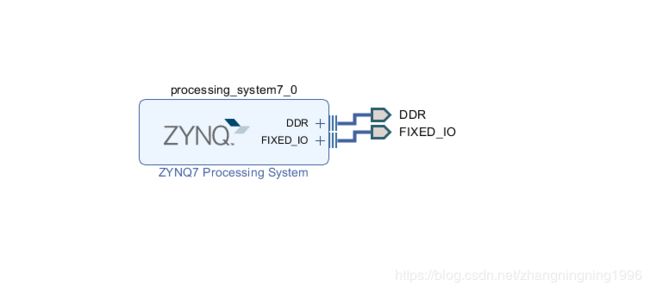
因为我们这篇文章主要讲解两个CPU之间的中断,那么关于PL侧的设计将没有什么重要设计,只需要例化相应的ZYNQ IP核,然后分配相应的DDR3即可。相应的Block Design如下:
PS端设计
这里因为要跑双核程序,那么就需要进行相应的设置,详细的设置可以观察博主的这篇文章基于ZYNQ的双核CPU之间的通信,注意这里的设置特别重要,否则ZYNQ的双核无法正常工作。
CPU0代码
这里我们废话不多说直接给出CPU0的代码:
这里使用了13,14软中断
#include 这里需要特别注意软中断的触发函数:
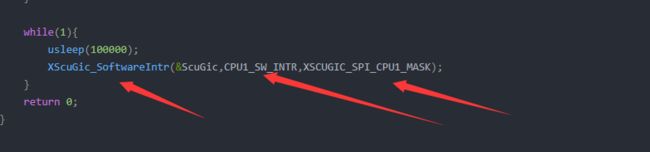
第二个参数是软中断编号,第三个参数是CPU编号。
CPU1代码
CPU1的代码如下:
#include 这里特别提醒何为中断,中断的频率肯定不会太高,因为那样就不是中断了,当频率特别高的时候中断会因为响应不及时而出现错误。
测试结果
我们将代码进行双核运行的必要控制,并且下板可以观察到如下现象:
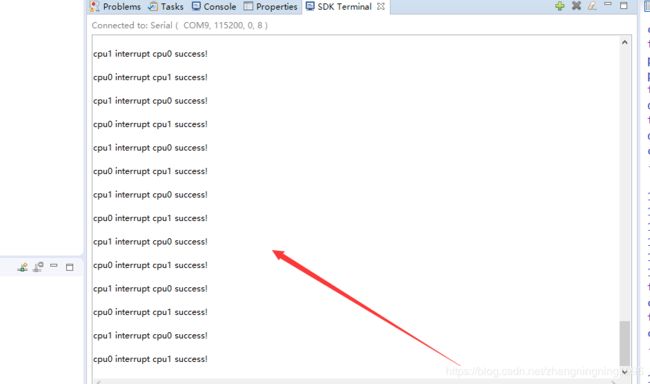
从上面的实验结果我们可以看出我们的软中断实验成功执行,进而验证了我们实验的正确性。
总结
创作不易,认为文章有帮助的同学们可以关注、点赞、转发支持。为行业贡献及其微小的一部分。或者对文章有什么看法或者需要更近一步交流的同学,可以加入下面的群:
