python openCV学习——基本的图像处理
文章目录
- 图片读取
- 显示图片
- 保存图片
- 通道分离
图片读取
# cv2.imread(filename[, flags])
img = cv2.imread('D:/screenshot.png', flags = cv2.IMREAD_UNCHANGED)
cv2.IMREAD_UNCHANGED表示保留原图片格式。
如果是彩色图片,那么img是一个三维数组。或者说,是一个二维数组,数组中每个元素是一个表示RBGA的四元数组。
常用的flags还有灰度图像输出,cv2.IMREAD_GRAYSCALE。此时,img是一个真正的二维数组,数组的每个元素是一个表示当前像素点的灰度值。
我们可以通过numpy库打印img的维度信息
print(numpy.array(img).shape)
# 输出 (540,960,4)
# 刚好是我设置的手机的分辨率
显示图片
cv2.namedWindow('window_name')
cv2.imshow('window_name', mat)
# or
cv2.imshow('window_name',mat)
namedWindow()打开一个窗口,imshow()在打开的窗口中显示图片。mat表示要显示的图片。
坑:实际上测试的时候,这句代码是显示不出图片的。从StackOverFlow中找到原因:imshow()必须和cv2.waitKey()配合使用。
cv2.imshow('window_name',mat)
cv2.waitKey()
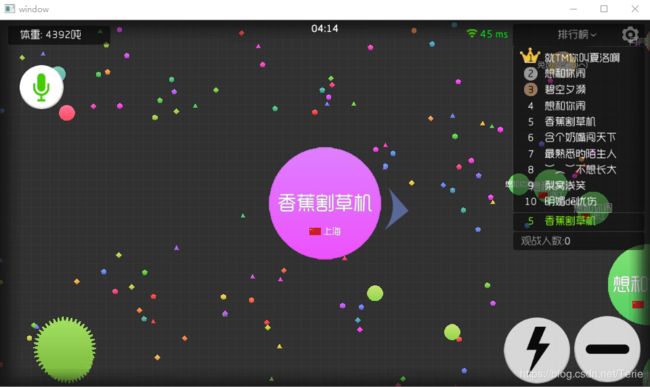
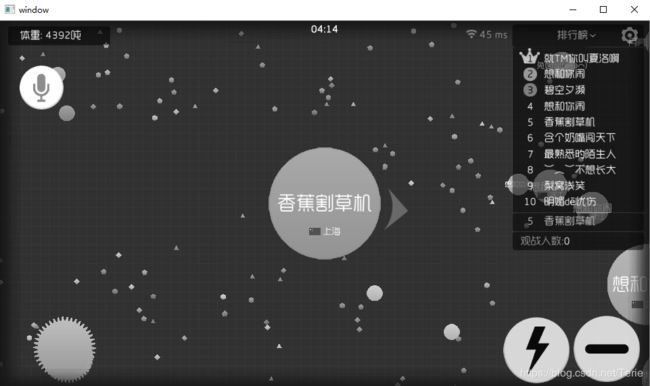
上面讲到的两种图片读取的格式显示效果分别如下:
保存图片
retval = cv2.imwrite(filename, img[, params]) # retval = True or False
我将用cv2.IMREAD_UNCHANGE格式读取的图片的所有像素的红色通道置零,并保存。图片如下:

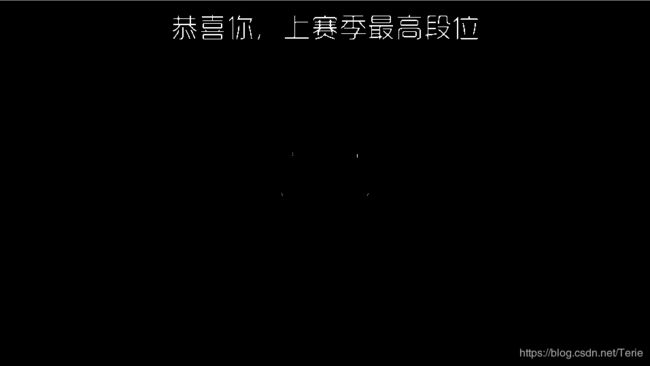
通道分离
通道分离和cv2.inRange()结合可以精确提取图中的指定颜色。
下面实例将一张png读取成RGB,然后对三个通道分离成三张灰度图,将用cv2.inRange()对三个通道的值进行限制,输出三张二值化的图像。最后将三张图像取交集:
count = 0
def show_img(img):
global count
cv2.imshow('win'+str(count), img)
count += 1
cv2.waitKey()
def main():
img_path = "./pictures/screenshot.png"
img = cv2.imread(img_path)
# 通道分离,注意顺序是 蓝,绿, 红
b_img = img[:,:,0]
g_img = img[:,:,1]
r_img = img[:,:,2]
# 选择范围
r_dst = cv2.inRange(r_img, 90, 115)
g_dst = cv2.inRange(g_img, 120, 135)
b_dst = cv2.inRange(b_img, 75, 95)
show_img(r_img)
show_img(g_img)
show_img(b_img)
show_img(r_dst)
show_img(g_dst)
show_img(b_dst)
# 取交集
img_dir = np.multiply(np.multiply(r_dst, g_dst), b_dst)
show_img(img_dir)
if __name__=="__main__":
main()