Arduino结合HX711实现8路信号采集称重
说明:使用两块Arduino实现8路Sensor同时采集,并输出控制信号
写作目的主要是为了作为学习笔记
Arduino & Sensor接线图
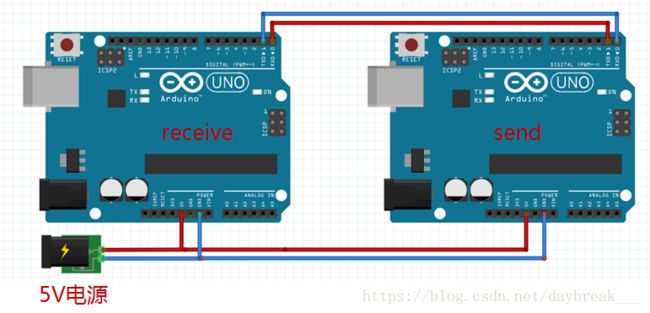
1、双机通讯连线图
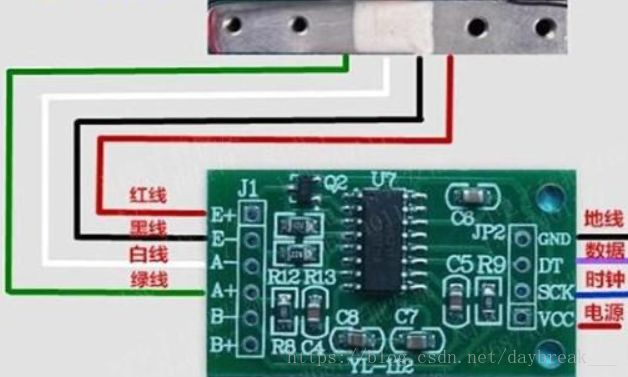
2、HX711和Sensor的连线图
3、将8个Sensor的SCK全部接到receive板的D2引脚
4、8个DATA线分别接至receive板的D3-D10引脚
5、将8路继电器模组控制引脚接到Send板的D2-D9
6、Send板的D10和D11作为接受信号引脚
注意Sensor和Arduino进行共地
HX711库文件
1、下载链接
链接:github链接.
2、将下载到的HX711 Master文件夹放入Arduino的libraries文件夹中并加载,所有需要用的函数,如偏差设定,系数设定等都在库文件里有定义,详细请查看库文件对于库函数的定义,当然也可以自己修改库函数,以方便实际使用需求
示例代码
1、send板代码
#include 发送字符中的a,b,c,#是作为标志符,以作为后续receive函数对接收到的数据进行分割处理
2、receive板代码
#include 控制代码的输出
数据的读取和双机通讯功能实现后便可以利用,接收到的数据进行一些其他的控制代码书写