zynq学习笔记——EMIO方式模拟SCCB时序进行读写操作
一、SCCB介绍
SCCB是OmniVision Serial Camera Control Bus的简称,即OV公司的串行摄像机控制总线。OV公司定义的SCCB是一个3线结构,但是,为了缩减Sensor的pin封装,SCCB大多采用2线方式。
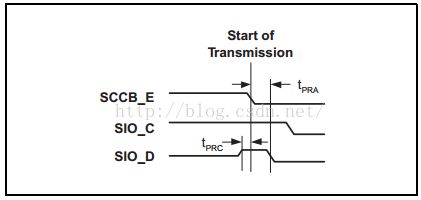
开始传输数据
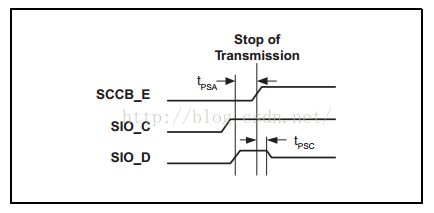
结束数据传输
传输规则
一个基本传输单元称作一个相
一个相包含总共9比特,前8比特为数据,第9比特为 Don't-Care bit 不关心比特,该第9比特的数据取决于
传输任务是读还是写。一个传输任务的最大相个数是3

3相写传输规则
提供些传输,主机能将1byte数据写至指定从机

ID Address表示指定从机的地址
Sub-address表示从机的寄存器
后面是数据,1字节数据
3个相为后一位都是Don't-Care bits
2相写传输规则

2相写传送是在2相读传送前的,它的目的是指明主机要从哪个从机的哪个寄存器读数据。
2相读传输规则

在2相读前面必须有2相写或者3相写,否则2相读没有办法读出哪个寄存器发的数据,主机必须将NA bit置为1(否则OV摄像头会把SIOD拉低)
“X”表示Don't-Care bit。意思是Master可以不关注此bit。从OV给的手册来看,Slave也可以驱动此bit为低,然后Master来确认响应。当然,Master也可以不关注。在SCCB手册中,这部分说的比较含糊,所以,简单来说,在SCCB中,Master不关注是否传输数据有错误发生。说实话,为了所做的设计可靠,还是应该关注的。
二、EMIO介绍
zynq的GPIO,分为两种,MIO(multiuse I/O)和EMIO(extendable multiuse I/O)

MIO分配在bank0和bank1直接与PS部分相连,EMIO分配在bank2和接和PL部分相连。除了bank1是22-bit之外,其他的bank都是32-bit。所以MIO有53个引脚可供我们使用,而EMIO有64个引脚可供我们使用。
使用EMIO的好处就,当MIO不够用时,PS可以通过驱动EMIO控制PL部分的引脚,接下来就来详细介绍下EMIO的使用。
EMIO的使用和MIO的使用其实是非常相似的。区别在于,EMIO的使用相当于,是一个PS + PL的结合使用的例子。所以,EMIO需要分配引脚,以及编译综合生成bit文件。
三、例子1、新建vivado 工程,create一个block design,添加zynq PS核

2、运行自动连接

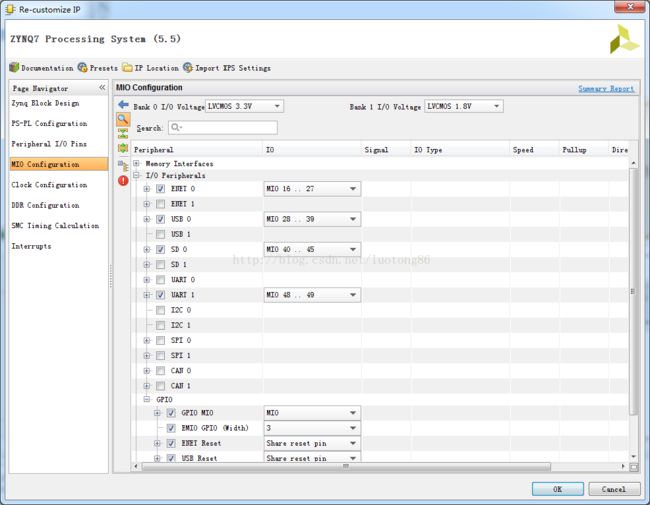
3、双击PS IP进行配置,增加三个EMIO,其中两个是SCCB的数据和时钟,另外一个拿来做复位
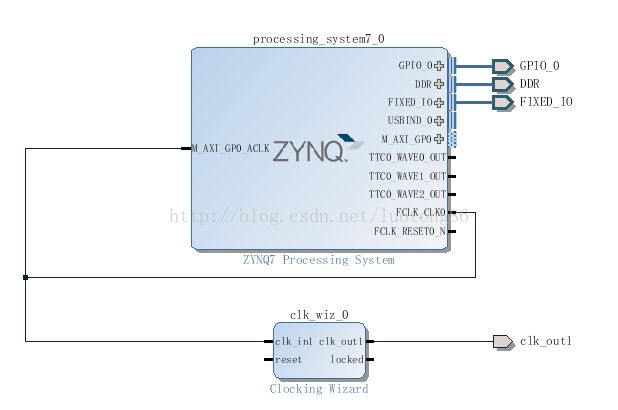
4、把新增的EMIO连接出来,并把时钟接好
5、增加一个clock IP,修改输出频率为24Mhz,把输出管脚接出
5、create HDL wrapper,生产HDL顶层文件,双击打开,可以看到刚才接出来的EMIO管脚名为gpio_0_tri_io

6、创建约束文件,我的摄像头的SIOD接到了W8,SIOC接到了V8,RESET接到AB11,XCLK接到W11

7、综合,生成bit文件,导出hardware并启动SDK,创建项目,添加如下代码
EMIO_init.h
#ifndef EMIO_INIT_H_
#define EMIO_INIT_H_
#include"xgpiops.h"
int EMIO_SCCB_init(void);
#define SIOD_PIN 54
#define SIOC_PIN 55
#define RESET_PIN 56
#define DIRECTION_INPUT 0
#define DIRECTION_OUTPUT 1
void CLOCK_HIGH(void);
void CLOCK_LOW(void);
void DATA_HIGH(void);
void DATA_LOW(void);
void DATA_INPUT(void);
void DATA_OUTPUT(void);
int GET_DATA(void);
void SCCB_reset(void);
#endif /* EMIO_INIT_H_ */EMIO_init.c
#include "xgpiops.h"
#include "EMIO_init.h"
static XGpioPs psGpioInstancePtr;
int EMIO_SCCB_init(void)
{
XGpioPs_Config* GpioConfigPtr;
int xStatus;
GpioConfigPtr = XGpioPs_LookupConfig(XPAR_PS7_GPIO_0_DEVICE_ID);
if(GpioConfigPtr == NULL)
return XST_FAILURE;
xStatus = XGpioPs_CfgInitialize(&psGpioInstancePtr,GpioConfigPtr,GpioConfigPtr->BaseAddr);
if(XST_SUCCESS != xStatus)
print("EMIO INIT FAILED \n\r");
XGpioPs_SetDirectionPin(&psGpioInstancePtr, SIOC_PIN,DIRECTION_OUTPUT);
XGpioPs_SetDirectionPin(&psGpioInstancePtr, SIOD_PIN,DIRECTION_OUTPUT);
XGpioPs_SetDirectionPin(&psGpioInstancePtr, RESET_PIN,DIRECTION_OUTPUT);
XGpioPs_SetOutputEnablePin(&psGpioInstancePtr, SIOC_PIN,1);
XGpioPs_SetOutputEnablePin(&psGpioInstancePtr, SIOD_PIN,1);
XGpioPs_SetOutputEnablePin(&psGpioInstancePtr, RESET_PIN,1);//
return xStatus;
}
void SCCB_reset(void)
{
XGpioPs_WritePin(&psGpioInstancePtr,RESET_PIN, 0);
usleep(50*1000);
XGpioPs_WritePin(&psGpioInstancePtr,RESET_PIN, 1);
}
void CLOCK_HIGH(void)
{
XGpioPs_WritePin(&psGpioInstancePtr,SIOC_PIN, 1);
}
void CLOCK_LOW(void)
{
XGpioPs_WritePin(&psGpioInstancePtr,SIOC_PIN, 0);
}
int GET_DATA(void)
{
return XGpioPs_ReadPin(&psGpioInstancePtr,SIOD_PIN);
}
void DATA_INPUT(void)
{
XGpioPs_SetDirectionPin(&psGpioInstancePtr, SIOD_PIN,DIRECTION_INPUT);//
}
void DATA_OUTPUT(void)
{
XGpioPs_SetDirectionPin(&psGpioInstancePtr, SIOD_PIN,DIRECTION_OUTPUT);//
}
void DATA_HIGH(void)
{
XGpioPs_WritePin(&psGpioInstancePtr,SIOD_PIN, 1);
}
void DATA_LOW(void)
{
XGpioPs_WritePin(&psGpioInstancePtr,SIOD_PIN,0);
}SCCB_ctrl.h
#ifndef SCCB_CTRL_H_
#define SCCB_CTRL_H_
void sccb_start(void);
void sccb_end(void);
void sccb_sendbyte( unsigned char value );
void sccb_senddata(unsigned char subaddr,unsigned char value);
int sccb_readdata(unsigned char addr, unsigned char *value);
#endif /* SCCB_CTRL_H_ */SCCB_ctrl.c
#include "sleep.h"
#include "EMIO_init.h"
#define OV7670_WRITE_ADDR 0x42
#define OV7670_READ_ADDR 0x43
#define SCCB_DELAY usleep(10)
void sccb_start(void)
{
CLOCK_HIGH();
DATA_HIGH();
SCCB_DELAY;
DATA_LOW();
SCCB_DELAY;
CLOCK_LOW();
SCCB_DELAY;
}
void sccb_end(void)
{
DATA_LOW();
SCCB_DELAY;
CLOCK_HIGH();
SCCB_DELAY;
DATA_HIGH();
SCCB_DELAY;
}
int sccb_sendbyte( unsigned char value )
{
unsigned char tmp = value;
unsigned char i=0,ack;
for(i=0; i<8; i++)
{
if(tmp & 0x80 )
DATA_HIGH();
else
DATA_LOW();
SCCB_DELAY;
CLOCK_HIGH();
SCCB_DELAY;
CLOCK_LOW();
SCCB_DELAY;
tmp<<=1;
}
DATA_HIGH();
DATA_INPUT();
SCCB_DELAY;
CLOCK_HIGH();
ack = GET_DATA();
SCCB_DELAY;
CLOCK_LOW();
SCCB_DELAY;
DATA_OUTPUT();
if(ack==1)
{
return -1;
}
return 0;
}
unsigned char sccb_readbyte( unsigned char addr)
{
unsigned char i=0,data=0;
DATA_HIGH();
DATA_INPUT();
for(i=0; i<8; i++)
{
CLOCK_HIGH();
SCCB_DELAY;
data <<= 1;
if(GET_DATA())
data |= 1;
SCCB_DELAY;
CLOCK_LOW();
SCCB_DELAY;
}
DATA_OUTPUT();
DATA_HIGH();
SCCB_DELAY;
CLOCK_HIGH();
SCCB_DELAY;
CLOCK_LOW();
SCCB_DELAY;
DATA_HIGH();
return data;
}
int sccb_readdata(unsigned char addr, unsigned char *value)
{
// 两相写
sccb_start();
if(sccb_sendbyte(OV7670_WRITE_ADDR) != 0)
{
sccb_end();
return -1;
}
if(sccb_sendbyte(addr) != 0)
{
sccb_end();
return -1;
}
sccb_end();
SCCB_DELAY;
// 两相读
sccb_start();
if(sccb_sendbyte(OV7670_READ_ADDR) != 0)
{
sccb_end();
return -1;
}
*value = sccb_readbyte(addr);
sccb_end();
return 0;
}
void sccb_senddata(unsigned char addr,unsigned char value)
{
sccb_start();
sccb_sendbyte(OV7670_WRITE_ADDR);
sccb_sendbyte(addr);
sccb_sendbyte(value);
sccb_end();
}修改main函数,读取PID和VER寄存器,验证是否正确,实际上我读取到的VER是0X73
int main()
{
unsigned char data;
init_platform();
print("Hello World\n\r");
EMIO_SCCB_init();
SCCB_reset();
usleep(500*1000);
while(1)
{
//读取PID
data = 0;
if(sccb_readdata(0x0A,&data) != 0)
{
print("error\n\r");
}
else
{
if(data != 0x76)
print("error\n\r");
}
//读取VER
data = 0;
if(sccb_readdata(0x0B,&data) != 0)
{
print("error\n\r");
}
else
{
if(data != 0x73)
print("error\n\r");
}
}
cleanup_platform();
return 0;
}