RT-Thread Studio入门(4)— 使用邮箱发送按键状态
RT-Thread Studio使用邮箱发送按键状态
我们在上一个工程(RT-Thread Studio使用轮询法检测按键)的基础上,使用邮箱发送信息给另一个线程,然后对该信息进行处理
一、邮箱的介绍
邮箱是RT-Thread中的一种线程间通信方法,特点是开销比较低,效率较高。邮箱中的每一封邮件只能容纳固定的 4 字节内容(针对 32位处理系统,指针的大小即为 4 个字节,所以一封邮件恰好能够容纳一个指针)。典型的邮箱也称作交换消息,如下图所示,线程或中断服务例程把一封4 字节长度的邮件发送到邮箱中,而一个或多个线程可以从邮箱中接收这些邮件并进行处理。(引用自RT-Thread文档中心)

二、创建按键状态邮箱
我们通过动态方法创建一个邮箱
首先,定义一个邮箱控制块结构体指针
/* 定义一个按键状态邮箱控制块结构体指针*/
rt_mailbox_t key_mailbox = RT_NULL;
然后使用动态邮箱创建函数创建一个邮箱
/* 使用动态创建方法创建一个邮箱 */
key_mailbox = rt_mb_create ("key mailbox", /* 邮箱名称 */
4, /* 邮箱容量,即该邮箱最多可以保存几封邮件 */
RT_IPC_FLAG_FIFO); /* 采用FIFO方式进行线程等待 */
邮箱创建成功后会返回邮箱对象的句柄,如果邮箱创建失败,则返回RT_NULL
/* 判断邮箱是否创建成功 */
if( key_mailbox != RT_NULL)
rt_kprintf("key mailbox create succeed. \n");
else
rt_kprintf("key mailbox create failure. \n");
三、发送邮件
在按键被按下时,我们向邮箱中发送对应的邮件,使用非等待方式发送邮件
if (rt_pin_read(PIN_WK_UP) == PIN_HIGH)
{
/* 按键WK_UP按下,按键按下处理*/
rt_kprintf("WK_UP pressed!\n");
/* 发送"WK_UP pressed!"字符串地址到key_mailbox邮箱中 */
rt_mb_send(key_mailbox, (rt_uint32_t)&"WK_UP pressed!");
}
else if (rt_pin_read(PIN_KEY0) == PIN_LOW)
{
/* 按键KEY0按下,按键按下处理*/
rt_kprintf("KEY0 pressed!\n");
/* 发送"KEY0 pressed!"字符串地址到key_mailbox邮箱中 */
rt_mb_send(key_mailbox, (rt_uint32_t)&"KEY0 pressed!");
}
else if (rt_pin_read(PIN_KEY1) == PIN_LOW)
{
/* 按键KEY0按下,按键按下处理*/
rt_kprintf("KEY1 pressed!\n");
/* 发送"KEY1 pressed!"字符串地址到key_mailbox邮箱中 */
rt_mb_send(key_mailbox, (rt_uint32_t)&"KEY1 pressed!");
}
else if (rt_pin_read(PIN_KEY2) == PIN_LOW)
{
/* 按键KEY0按下,按键按下处理*/
rt_kprintf("KEY2 pressed!\n");
/* 发送"KEY2 pressed!"字符串地址到key_mailbox邮箱中 */
rt_mb_send(key_mailbox, (rt_uint32_t)&"KEY2 pressed!");
}
其中,邮件发送函数rt_mb_send(),第一个参数为邮箱对象句柄的结构体指针,第二个参数为邮件内容。若邮箱已满,则将该邮件直接丢弃。
四、接收邮件
为了方便,我们直接在主线程中接收邮件,然后对邮件进行处理,我们将超时时间设置为永久等待。
#include 其中要特别注意的是接收邮件函数的第二个参数,需要填入的是我们用来接收邮件的变量的地址,因为我们的邮件是一个字符串指针,所以该参数应该为一个字符串指针的指针,即要在字符串指针变量前加入取地址符&
五、实现效果
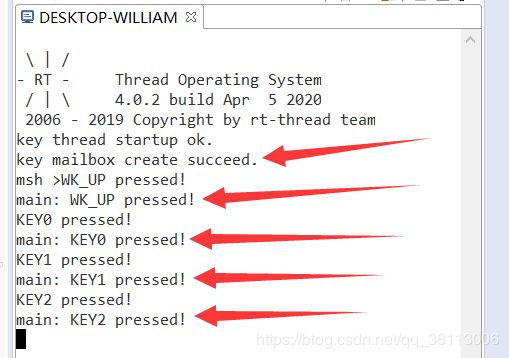
可以看到,邮箱创建成功,同时在main线程中也接收到了邮件,且接收正确。
六、代码
最后,把app_key.c的代码贴上:
/*
* Copyright (c) 2006-2020, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2020-04-06 william the first version
*/
#include