STM32用PWM实现小电机的正反转
2019年7月23日
做小车的第三天。
/*********************记得这是自己上一年暑假写的代码(已删除了,现在就是想把最新的代码和思路分享出来),当时自己把小电机的前进后退调出来之后,一直想控制速度,那时候自己急于求成啊,就想快点把它弄懂,可是那时候就知道一个思路然后就猛干了。现在是时候进行一下弥补了
***********************/
大概思路就是:用TIM1和TIM4两个时钟共8个通道,用PWM来控制小车的4个轮子。
TIM1中的PA8 A9代表左前轮, A10 A11代表左后轮;
TIM4中的PB6 B7代表右前轮,B8 B9代表右后轮
还是老样子把完整的代码贴出来。
timer.h
// An highlighted block
#ifndef __TIMER_H
#define __TIMER_H
#include "sys.h"
void TIM4_PWM_Init();
void TIM1_PWM_Init();
void Prun(); //前进
void Nrun(); //后退
void Tleft(); //左转
void Trighet();//右转
#endiftimer.c
// An highlighted block
#include "timer.h"
#include "led.h"
//TIM4 PWM部分初始化
//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM4_PWM_Init()
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //使能定时器4时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9; //
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
//初始化TIM4
TIM_TimeBaseStructure.TIM_Period = 99; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =719; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM4 Channel/2/3/4 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC1Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM4 OC1
TIM_OC2Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM4 OC2
TIM_OC3Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM4 OC3
TIM_OC4Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM4 OC4
TIM_OC1PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR1上的预装载寄存器
TIM_OC2PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR2上的预装载寄存器
TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR3上的预装载寄存器
TIM_OC4PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR4上的预装载寄存器
TIM_ARRPreloadConfig(TIM4,ENABLE);
TIM_Cmd(TIM4, ENABLE); //使能TIM4
}
void TIM1_PWM_Init()
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); //使能定时器1时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIO外设
//设置该引脚为复用输出功能,输出TIM1 PWM脉冲波形
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_9|GPIO_Pin_10|GPIO_Pin_11; //TIM_CHX
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIO
//初始化TIM1
TIM_TimeBaseStructure.TIM_Period = 99; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =719; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM4 Channel/2/3/4 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OutputNState=TIM_OutputState_Disable;//高级定时器有一个输出N不使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OCInitStructure.TIM_OCNPolarity=TIM_OCPolarity_High;//
TIM_OCInitStructure.TIM_OCIdleState=TIM_OCIdleState_Reset;//这三个是高级定时器要配置的
TIM_OCInitStructure.TIM_OCNIdleState=TIM_OCIdleState_Reset;//
//TIM_OCInitStructure.TIM_Pulse=10;
TIM_OC1Init(TIM1, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM1 OC1
TIM_OC2Init(TIM1, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM1 OC2
TIM_OC3Init(TIM1, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM1 OC3
TIM_OC4Init(TIM1, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM1 OC4
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //使能TIM1在CCR1上的预装载寄存器
TIM_OC2PreloadConfig(TIM1, TIM_OCPreload_Enable); //使能TIM1在CCR2上的预装载寄存器
TIM_OC3PreloadConfig(TIM1, TIM_OCPreload_Enable); //使能TIM1在CCR3上的预装载寄存器
TIM_OC4PreloadConfig(TIM1, TIM_OCPreload_Enable); //使能TIM1在CCR4上的预装载寄存器
TIM_ARRPreloadConfig(TIM1,ENABLE);//使能自动重装载值
TIM_CtrlPWMOutputs(TIM1,ENABLE);//主输出使能
TIM_Cmd(TIM1, ENABLE); //使能TIM1
}
//TIM1中的PA8 A9代表左前轮, A10 A11代表左后轮; TIM4中的PB6 B7代表右前轮,B8 B9代表右后轮
void Prun()
{
TIM_SetCompare1(TIM1,10); //左前前进
TIM_SetCompare2(TIM1,0);
TIM_SetCompare3(TIM1,10); //左后前进
TIM_SetCompare4(TIM1,0);
TIM_SetCompare1(TIM4,10); //右前前进
TIM_SetCompare2(TIM4,0);
TIM_SetCompare3(TIM4,10); //右后前进
TIM_SetCompare4(TIM4,0);
}
void Nrun()
{
TIM_SetCompare1(TIM1,0); //左前后退
TIM_SetCompare2(TIM1,10);
TIM_SetCompare3(TIM1,0); //左后后退
TIM_SetCompare4(TIM1,10);
TIM_SetCompare1(TIM4,0); //右前后退
TIM_SetCompare2(TIM4,10);
TIM_SetCompare3(TIM4,0); //右后后退
TIM_SetCompare4(TIM4,10);
}
void Tleft() // 原地左转 左边的两个轮子往后转,右边的两个轮子往前转
{
TIM_SetCompare1(TIM1,0); //左前后退
TIM_SetCompare2(TIM1,10);
TIM_SetCompare3(TIM1,0); //左后后退
TIM_SetCompare4(TIM1,10);
TIM_SetCompare1(TIM4,10); //右前前进
TIM_SetCompare2(TIM4,0);
TIM_SetCompare3(TIM4,10); //右后前进
TIM_SetCompare4(TIM4,0);
}
void Trighet()
{
TIM_SetCompare1(TIM1,10); //左前前进
TIM_SetCompare2(TIM1,0);
TIM_SetCompare3(TIM1,10); //左后前进
TIM_SetCompare4(TIM1,0);
TIM_SetCompare1(TIM4,0); //右前后退
TIM_SetCompare2(TIM4,10);
TIM_SetCompare3(TIM4,0); //右后后退
TIM_SetCompare4(TIM4,10);
}// A code block
**进行一些简单说明**
上面的重装载值arr=99,预分频系数psc=719;
T=arr * psc /72M,结果为1ms,也就是频率为1KHz;
PWM模式设置为TIM_OCMode_PWM1,arr=99,
这样一来占空比调整比较方便:
arr=10——占空比为10%;
arr=20——占空比为20%;
上面的占空比我设置的是10%,电机转的比较慢(还可以),你可以根据你自己的情况进行自己更改。
main.c
// An highlighted block
#include "delay.h"
//#include "key.h"
#include "sys.h"
#include "timer.h"
int main(void)
{
delay_init(); //延时函数初始化
TIM4_PWM_Init();
TIM1_PWM_Init();
while(1)
{
Prun();//前进
}
}
下面插一张自己调试的图片:
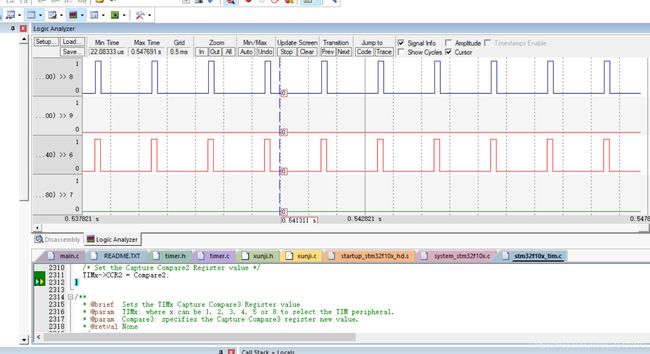
这次应该没什么问题了,如果你们发现什么问题,希望多多指正。
博客经常上ou。