卷积神经网络参数说明
由于神经网络中有不同的层结构,不同类型的层又有不同的参数,所有就根据Caffe官网的说明文档做了一个简单的总结。
1. Vision Layers
1.1 卷积层(Convolution)
类型:CONVOLUTION
例子
layers { name: "conv1" type: CONVOLUTION bottom: "data" top: "conv1" blobs_lr: 1 # learning rate multiplier for the filters blobs_lr: 2 # learning rate multiplier for the biases weight_decay: 1 # weight decay multiplier for the filters weight_decay: 0 # weight decay multiplier for the biases convolution_param { num_output: 96 # learn 96 filters kernel_size: 11 # each filter is 11x11 stride: 4 # step 4 pixels between each filter application weight_filler { type: "gaussian" # initialize the filters from a Gaussian std: 0.01 # distribution with stdev 0.01 (default mean: 0) } bias_filler { type: "constant" # initialize the biases to zero (0) value: 0 } }}
blobs_lr: 学习率调整的参数,在上面的例子中设置权重学习率和运行中求解器给出的学习率一样,同时是偏置学习率为权重的两倍。
weight_decay:
卷积层的重要参数
必须参数:
num_output (c_o):过滤器的个数
kernel_size (or kernel_h and kernel_w):过滤器的大小
可选参数:
weight_filler [default type: 'constant' value: 0]:参数的初始化方法
bias_filler:偏置的初始化方法
bias_term [default true]:指定是否是否开启偏置项
pad (or pad_h and pad_w) [default 0]:指定在输入的每一边加上多少个像素
stride (or stride_h and stride_w) [default 1]:指定过滤器的步长
group (g) [default 1]: If g > 1, we restrict the connectivityof each filter to a subset of the input. Specifically, the input and outputchannels are separated into g groups, and the ith output group channels will beonly connected to the ith input group channels.
通过卷积后的大小变化:
输入:n * c_i * h_i * w_i
输出:n * c_o * h_o * w_o,其中h_o = (h_i + 2 * pad_h - kernel_h) /stride_h + 1,w_o通过同样的方法计算。
1.2 池化层(Pooling)
类型:POOLING
例子
layers { name: "pool1" type: POOLING bottom: "conv1" top: "pool1" pooling_param { pool: MAX kernel_size: 3 # pool over a 3x3 region stride: 2 # step two pixels (in the bottom blob) between pooling regions }}卷积层的重要参数
必需参数:
kernel_size (or kernel_h and kernel_w):过滤器的大小
可选参数:
pool [default MAX]:pooling的方法,目前有MAX, AVE, 和STOCHASTIC三种方法
pad (or pad_h and pad_w) [default 0]:指定在输入的每一遍加上多少个像素
stride (or stride_h and stride_w) [default1]:指定过滤器的步长
通过池化后的大小变化:
输入:n * c_i * h_i * w_i
输出:n * c_o * h_o * w_o,其中h_o = (h_i + 2 * pad_h - kernel_h) /stride_h + 1,w_o通过同样的方法计算。
1.3 Local Response Normalization (LRN)
类型:LRN
Local ResponseNormalization是对一个局部的输入区域进行的归一化(激活a被加一个归一化权重(分母部分)生成了新的激活b),有两种不同的形式,一种的输入区域为相邻的channels(cross channel LRN),另一种是为同一个channel内的空间区域(within channel LRN)
计算公式:对每一个输入除以
可选参数:
local_size [default 5]:对于cross channel LRN为需要求和的邻近channel的数量;对于within channel LRN为需要求和的空间区域的边长
alpha [default 1]:scaling参数
beta [default 5]:指数
norm_region [default ACROSS_CHANNELS]: 选择哪种LRN的方法ACROSS_CHANNELS 或者WITHIN_CHANNEL
2. Loss Layers
深度学习是通过最小化输出和目标的Loss来驱动学习。
2.1 Softmax
类型: SOFTMAX_LOSS2.2 Sum-of-Squares / Euclidean
类型: EUCLIDEAN_LOSS
2.3 Hinge / Margin
类型: HINGE_LOSS例子:
# L1 Normlayers { name: "loss" type: HINGE_LOSS bottom: "pred" bottom: "label"}# L2 Normlayers { name: "loss" type: HINGE_LOSS bottom: "pred" bottom: "label" top: "loss" hinge_loss_param { norm: L2 }}
可选参数:
norm [default L1]: 选择L1或者 L2范数
输入:
n * c * h * wPredictions
n * 1 * 1 * 1Labels
输出
1 * 1 * 1 * 1Computed Loss
2.4 Sigmoid Cross-Entropy
类型:SIGMOID_CROSS_ENTROPY_LOSS2.5 Infogain
类型:INFOGAIN_LOSS2.6 Accuracy and Top-k
类型:ACCURACY 用来计算输出和目标的正确率,事实上这不是一个loss,而且没有backward这一步。
3. 激励层(Activation / Neuron Layers)
一般来说,激励层是element-wise的操作,输入和输出的大小相同,一般情况下就是一个非线性函数。
3.1 ReLU / Rectified-Linear and Leaky-ReLU
类型: RELU例子:
layers { name: "relu1" type: RELU bottom: "conv1" top: "conv1"}
可选参数:
negative_slope [default 0]:指定输入值小于零时的输出。
ReLU是目前使用做多的激励函数,主要因为其收敛更快,并且能保持同样效果。
标准的ReLU函数为max(x, 0),而一般为当x > 0时输出x,但x <= 0时输出negative_slope。RELU层支持in-place计算,这意味着bottom的输出和输入相同以避免内存的消耗。
3.2 Sigmoid
类型: SIGMOID例子:
layers { name: "encode1neuron" bottom: "encode1" top: "encode1neuron" type: SIGMOID}
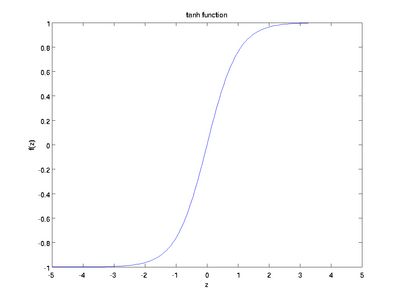
3.3 TanH / Hyperbolic Tangent
类型: TANH例子:
layers { name: "encode1neuron" bottom: "encode1" top: "encode1neuron" type: SIGMOID}
TANH层通过 tanh(x) 计算每一个输入x的输出,函数如下图。
3.3 Absolute Value
类型: ABSVAL例子:
layers { name: "layer" bottom: "in" top: "out" type: ABSVAL}
3.4 Power
类型: POWER例子:
layers { name: "layer" bottom: "in" top: "out" type: POWER power_param { power: 1 scale: 1 shift: 0 }}POWER层通过 (shift + scale * x) ^ power计算每一个输入x的输出。
3.5 BNLL
类型: BNLL例子:
layers { name: "layer" bottom: "in" top: "out" type: BNLL}BNLL (binomial normal log likelihood) 层通过 log(1 + exp(x)) 计算每一个输入x的输出。
4. 数据层(Data Layers)
数据通过数据层进入Caffe,数据层在整个网络的底部。数据可以来自高效的数据库(LevelDB 或者 LMDB),直接来自内存。如果不追求高效性,可以以HDF5或者一般图像的格式从硬盘读取数据。
4.1 Database
类型:DATA
必须参数:
source:包含数据的目录名称
batch_size:一次处理的输入的数量
可选参数:
rand_skip:在开始的时候从输入中跳过这个数值,这在异步随机梯度下降(SGD)的时候非常有用
backend [default LEVELDB]: 选择使用 LEVELDB 或者 LMDB
4.2 In-Memory
类型: MEMORY_DATA 必需参数: batch_size, channels, height, width: 指定从内存读取数据的大小 The memory data layer reads data directly from memory, without copying it. In order to use it, one must call MemoryDataLayer::Reset (from C++) or Net.set_input_arrays (from Python) in order to specify a source of contiguous data (as 4D row major array), which is read one batch-sized chunk at a time.
4.3 HDF5 Input
类型: HDF5_DATA 必要参数: source:需要读取的文件名batch_size:一次处理的输入的数量
4.4 HDF5 Output
类型: HDF5_OUTPUT 必要参数: file_name: 输出的文件名HDF5的作用和这节中的其他的层不一样,它是把输入的blobs写到硬盘
4.5 Images
类型: IMAGE_DATA 必要参数: source: text文件的名字,每一行给出一张图片的文件名和label batch_size: 一个batch中图片的数量 可选参数: rand_skip: 在开始的时候从输入中跳过这个数值,这在异步随机梯度下降(SGD)的时候非常有用 shuffle [default false]new_height, new_width: 把所有的图像resize到这个大小
4.6 Windows
类型:WINDOW_DATA4.7 Dummy
类型:DUMMY_DATADummy 层用于development 和debugging。具体参数DummyDataParameter。
5. 一般层(Common Layers)
5.1 全连接层Inner Product
类型:INNER_PRODUCT 例子:layers { name: "fc8" type: INNER_PRODUCT blobs_lr: 1 # learning rate multiplier for the filters blobs_lr: 2 # learning rate multiplier for the biases weight_decay: 1 # weight decay multiplier for the filters weight_decay: 0 # weight decay multiplier for the biases inner_product_param { num_output: 1000 weight_filler { type: "gaussian" std: 0.01 } bias_filler { type: "constant" value: 0 } } bottom: "fc7" top: "fc8"}必要参数:
num_output (c_o):过滤器的个数
可选参数:
weight_filler [default type: 'constant' value: 0]:参数的初始化方法
bias_filler:偏置的初始化方法
bias_term [default true]:指定是否是否开启偏置项
通过全连接层后的大小变化:
输入:n * c_i * h_i * w_i
输出:n * c_o * 1 *1
5.2 Splitting
类型:SPLIT Splitting层可以把一个输入blob分离成多个输出blobs。这个用在当需要把一个blob输入到多个输出层的时候。5.3 Flattening
类型:FLATTEN Flattening是把一个输入的大小为n * c * h * w变成一个简单的向量,其大小为 n * (c*h*w) * 1 * 1。5.4 Concatenation
类型:CONCAT 例子:layers { name: "concat" bottom: "in1" bottom: "in2" top: "out" type: CONCAT concat_param { concat_dim: 1 }}
可选参数:
concat_dim [default 1]:0代表链接num,1代表链接channels
通过全连接层后的大小变化:
输入:从1到K的每一个blob的大小n_i * c_i * h * w
输出:
如果concat_dim = 0: (n_1 + n_2 + ... + n_K) *c_1 * h * w,需要保证所有输入的c_i 相同。
如果concat_dim = 1: n_1 * (c_1 + c_2 + ... +c_K) * h * w,需要保证所有输入的n_i 相同。
通过Concatenation层,可以把多个的blobs链接成一个blob。
5.5 Slicing
The SLICE layer is a utility layer that slices an input layer to multiple output layers along a given dimension (currently num or channel only) with given slice indices.5.6 Elementwise Operations
类型:ELTWISE5.7 Argmax
类型:ARGMAX5.8 Softmax
类型:SOFTMAX5.9 Mean-Variance Normalization
类型:MVN
6. 参考
Caffe