【论文阅读】改进的基于均值滤波的单幅图像去雾算法研究
改进的基于均值滤波的单幅图像去雾算法研究
吴延海,张婧,陈康
西安科技大学 学报, 2016
本文是在《基于单幅图像的快速去雾》基础上进行改进。主要改进有以下几点:
- 对《基于单幅图像的快速去雾》求出的L进行直方图修正。(也就是T的修正)
- 采用四叉树分裂算法求A,避免图中局部高亮雾图对A的影响。
- 对恢复的图像进行后处理。
1.投射图T
与《基于单幅图像的快速去雾》一样,求出:
V ( x ) = min ( min ( e m a v , 0.9 ) M a v e ( x ) , M ( x ) ) V(x)=\min \left(\min \left(e m_{\mathrm{av}}, 0.9\right) M_{\mathrm{ave}}(x), M(x)\right) V(x)=min(min(emav,0.9)Mave(x),M(x))
此处 V ( x ) = A ( 1 − t ( x ) ) V(x)=A(1-t(x)) V(x)=A(1−t(x))。
此后对V进行修正。这里修正的原因是:
由于天空或明亮区域不满足暗原色先验规律,故造成大面积的色彩失真,均值滤波对天空区域或明亮区域的大气散射函数去雾力度过大,导致本来相差几个像素值被放大到几倍或几十倍,特别是当R,G,B三通道方向不一致时,所有的落差得到叠加,这就形成了天空或明亮区域的色彩失真。
ps:这里故事讲的有问题,其实原文基于均值滤波,并没有任何地方关系到暗通道先验,所以修正的理由有问题,问题提的有问题。
于是,作者经过大量实验(没有详细描述、证明)发现天空区域或者明亮区域的归一化直方图有以下特点:
- 天空区域的亮度值高于非天空区域,并且几乎不会交接;(天空区域亮度高,且近似空间连续)
- 天空区域在直方图右端分布较集中,表现为一个显著的尖峰。(天空区域在直方图的右端,即灰度值明显高区其他区域)
故本文提出一个天空区域的保护因子Thr(其实就是一个阈值),避免天空失真。(其实去雾中天空色彩失真的大部分原因是A值评估的不准确)。本文修正方法如下:
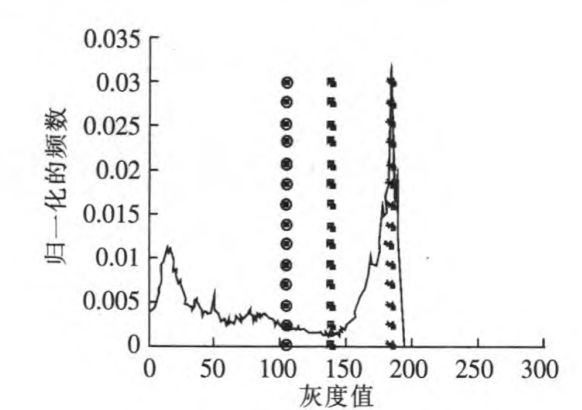
- 对V(x)做归一化直方图R(x),取R(x)最大值点对应的灰度值为a。(如上图a=190,目测结果)。
- 利用大津法对R(x)进行阈值分割,即为b(上图b=100)。
- 在a、b之间找到直方图的最小极值点c(上图为c=140)。故Thrr=c=140.
- 实验中得出一个先验模式: R ( T h r ) < 0.0015 R(Thr)<0.0015 R(Thr)<0.0015,则认为存在天空区域,此时 T h r = A − T h r r Thr = A-Thrr Thr=A−Thrr,即直方图中尖峰宽度([140,190]);否则不存在天空区域,设定Thr=0.1。(感觉这里比较没有说服力,天空判断过于粗糙,难以应对复杂场景)。
至此,重新修正V得:
V ( x ) = min ( a b s ( I − A ) T h r , 1 ) ⋅ ω ⋅ min ( min ( e m a v , 0.9 ) M a v e ( x ) , M ( x ) ) \begin{array}{c}{V(x)=\min \left(\frac{a b s(I-A)}{T h r}, 1\right) \cdot \omega \cdot \min (\min }{\left(e m_{\mathrm{av}}, 0.9\right) M_{\mathrm{ave}}(x), M(x) )}\end{array} V(x)=min(Thrabs(I−A),1)⋅ω⋅min(min(emav,0.9)Mave(x),M(x))
其中 ω = 0.95 \omega=0.95 ω=0.95,表示去雾程度,与DCP论文一样。I为雾图。
2.大气光A
通常选择雾天退化图像中雾浓度最大的像素点的值作为大气光A的强度。但是实际场景往往是比较复杂,特别是存在明亮区域或白色物体时,大气光的估计会出现较大的偏差。而DCP论文采用按通道图最大的前0.1%像素点的最亮点作为A。但这种方法慢,而且途中存在白色物体时不准确。
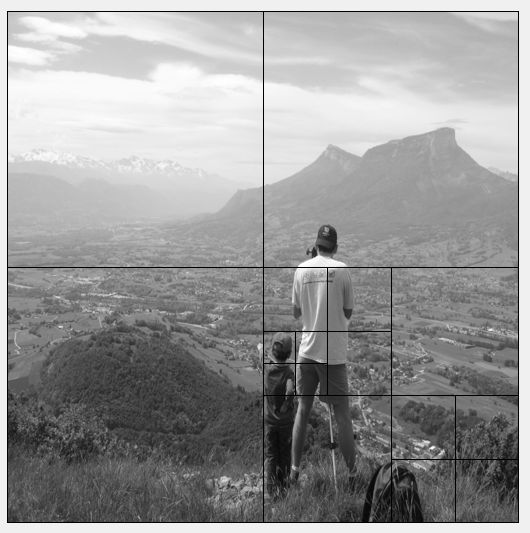
本文采用四叉树分裂算法求A(该方法出自下文)。
Kim J H,Jang W D,Sim J Y,et a1.Optimized contrastenhancement for real-time image and video dehazing [J].Journal of Visual Communication&Image Representation,2013,24(3):410—425.
方法步骤:
- 首先求出图像的通道最小值
- 然后将通道最小值图像划分成4个区域,分别计算各区域平均亮度,取区域中均值最大的区域重复划分,直到该区域的大小小于给定阈值,一般设阈值为20×20。
- 最后根据所标记图像的位置计算原雾图中R,G,B通道中此块的均值作为A值。
附四叉树分裂算法matlab代码:
I = imread('img\example-02-haze.png');
% 1.注意图像size必须是2的n次方
I = imresize(I,[512 512]);
% 2.输入图像必须是单通道图像
I = rgb2gray(I);
S = qtdecomp(I,0.9);
% 在途中绘制四分结果
for dim = [512 256 128 64 32 16 8 4 2 1];
numblocks = length(find(S==dim));
if (numblocks > 0)
[values, r, c] = qtgetblk(I, S, dim);%读取S中所有尺寸为dim x dim的block,r和c是所有块的左上角点位置
values(1:end,1,:)=0;%直接修改所有block的左、上边界为黑色。注意values是三维矩阵!!
values(1,1:end,:)=0;
I= qtsetblk(I,S,dim,values);%直接用修改后的block去替换S中的现有block
end
end
I(end,1:end) = 0;
I(1:end,end) = 0;
figure, imshow(I,[])
3.图像色调调整(去雾结果后处理)
原因是恢复后的图相色调偏暗,所以需进行色调调整。不是重点,不再详细介绍,通常采用伽马校正也可。
4.本文的另一个有意义的地方是客观评价更为科学,采用可见边梯度法对去雾算法做客观评价。该盲评价方法出自下文
Hautiere N , Tarel J P , Aubert D , et al. Blind contrast enhancement assessment by gradient ratioing at visible edges.(Report)[J]. Image Analysis & Stereology, 2011, 27(2):87-95.
吴延海, 张烨, 马孟新. 基于NSCT变换和压缩感知的图像融合[J]. 西安科技大学学报, 2015(04):480-485.
该方法用复原后的新增可见边之比、可见边的规范化梯度均值和时间来评价图像的复原效果。
e = n r − n 0 n 0 r = g ‾ r g ‾ 0 \begin{aligned} e &=\frac{n_{\mathrm{r}}-n_{0}}{n_{0}} \\ r &=\frac{\overline{g}_{\mathrm{r}}}{\overline{g}_{0}} \end{aligned} er=n0nr−n0=g0gr
n 0 n_0 n0和 n r n_r nr分别代表原图像和去雾图像中的可见边的数目,则e表示新增可见边的比例。 g ‾ 0 \overline{g}_{0} g0和 g ‾ r \overline{g}_{\mathrm{r}} gr分别表示原有图像和去雾图的平均梯度,通常e和r越大表示复原图像的质量越高。