这几天帮学长研究这篇论文,整理了这些笔记,由于我在CV方面刚刚入门,博客中可能会有很多错误与不当之处,希望大家能多多指正。
附上我自己修改的C++代码,可以运行在windows环境下:
链接:https://pan.baidu.com/s/1nnQO9HEkiaRLYHRAIzNDaw
提取码:jarz
代码参考自:https://github.com/coderSkyChen/MBS_Cplus_c-
1. Introduction
显著性目标检测目的是得到显著图(saliency map),现有技术要求高质量和高速度。
论文的核心算法是基于最小化栅格距离 (MBD) 变换提出。 这个算法对像素值波动的鲁棒性很好, 因此可以直接用在 raw 像素值上, 而不必经过区域抽象化预处理(region abstraction, 处理之后可得到超像素)。但是, 由于 MBD 算法的复杂度很高且计算耗时, 本文提出一种 “近似 MBD” 转换的FastMBD 算法,同时提供了误差边界分析。
3. Fast Approximate MBD Transform
3.1. Background: Distance Transform
图像距离变换的目的是计算相对于一组背景种子像素的距离图。
![]()
D(t)就是我们要求得的距离图。F是路径代价函数,它有很多种选择:
1.geodesic path cost function:

2.Minimum Barrier Distance

所以,我们的目标是让D(t)最小,而D(t)表示从种子(背景)点集合(在下文中我们会看到取图像边界一周的像素为种子集合S)到当前处理的像素点t的所有路径(注意是四邻接)中路径代价函数的最小值。如果路径代价函数采用MBD,那么就是每条路径中包含的最大像素值与最小像素值之差。如果采用geodesic path cost function,就是路径中后一像素减去前一像素的绝对值之和。
不妨仔细想一下,用geodesic path cost function的话,因为它最终的值是路径绝对值差分之和,即使我们的路径都是在相似的像素之间(比如一条完全在背景内的路径,背景像素差异不大)会把许多小的差异值累积起来,会导致越往图像中间走累积的小误差越来越大,这也是论文中图4下面一行的结果中间是模糊的原因。而用MBD,由于它只关注路径中像素最大值减去最小值,所以对于这些小误差并不会累积,而且路径从背景走到前景时,像素值差异会很大,这样计算出的D(t)具有很好的效果。
3.2. Fast MBD Transform by Raster Scan
FastMBD 是使用一种迭代的方法得到近似的 MBD 值。
通过下式进行迭代:

其中P(y)·
3.3. Approximation Error Analysis
FastMBD (Eqn. 4)的更新规则与Dijkstra算法求解最短路径问题具有相同的性质。但是,从[30]中可以看出,由于矩阵的非光滑性,使得类dijkstra算法不能准确地求解MBD变换。FastMBD的收敛解一般不等于精确的MBD变换。
定义1:图L的最大本地误差:εL
![]()
定义为在L上共享一条边或一个角的一对像素之间的最大绝对像素值差。
当种子集S是单个元素或者相互连接时,相应的误差以2εL为界,这是很松弛的一个边界。
在接下来的工作中,我们给出了一个FastMBD的收敛解是精确的非平凡充分条件。
首先根据下式取整函数将图像L离散化:
![]()
得到引理1:

它告诉我们,对于图上的每一个非种子点x,如果这个图的种子集合S相连的话,那么每个像素点和种子点之间的MBD距离与离散之后图的最小MBD距离D(x)小于一个定值εL。这个引理的用处在于告诉我们Fast*算法也能得到一个让我们较为满意的解。
推论2:

它告诉我们如果图L是整数类型的像素值,并且是4邻接的,如果种子集合相互连接且εL等于1,那么FastMBD的收敛解是精确的值。εL等于1的条件可以通过双线性插值对整值图像进行上采样来实现。注意,由于在Eqn. 3中使用了MBD的公式,所以MBD对上采样和模糊[8]非常鲁棒。因此,推论2可以作为FastMBD在极限下精确的理论保证。
除了最坏情况误差边界外,在实际中,均值误差和收敛速度更为重要。
我们在PASCAL-S数据集上运行FastMBD算法进行了测试,均值误差小于10/255,速度提升了100倍。
4. Minimum Barrier Salient Object Detection
本节讨论了基于fast-MSD的显著性物体检测的系统实现。
4.1. MBD Transform for Salient Object Detection
为了捕获图像边界连通性线索,我们将图像边界上的像素设置为种子,并使用FastMBD计算每个颜色通道的MBD变换。然后将所有颜色通道的MBD映射按像素级添加到一起,形成一个组合MBD map B,其像素值进一步缩放,使最大值为1。我们在FastMBD中使用了三个通道,发现增加通道的数量并不能提高性能。

上图中间一列显示了分别用MBD(上)和geodesic distance得到的distance maps。也就是我们上一段提到的最终组合的图B。最后一列显示了相应的最终显著性图。由于geodesic distance对像素值波动的敏感性,其中心区域具有模糊性。
Y.Wei, F.Wen,W. Zhu, and J. Sun. Geodesic saliency using background priors. In ECCV. 2012.中提到了一种在geodesic distance图上采用自适应边缘权值裁剪方法,解决了小权值累积的问题,但是本文中没有用,所以中心仍有模糊。MBD方法则不存在这个问题。
4.2. Combination with Backgroundness Cue
假设背景区域与图像边界区域有相似的外观,结合基于外观的背景线索,对该方法进行了扩展。这种基于外观的线索在显著区域与图像边界接触时具有较强的鲁棒性,与MBD map B捕捉到的几何线索互补。我们提出了一个更有效的方法来利用这一背景线索使用颜色空间增白。
首先计算Image Boundary Contrast (IBC) Map 图像边界对比图 U,用来突出与图像边界在外观上有高对比度的区域。考虑4个边界区域:上、下、左、右。每个区域是 r 个像素宽,计算每个区域的均值和协方差矩阵,然后IBC Map:
![]()
可以根据马氏距离均值颜色的距离计算:

Uk被归一化,值在[0,1]之间。上述公式相当于在白化的颜色空间中测量色差。在加白的颜色空间中,由于加白空间的坐标是去相关和归一化的,因此欧几里德距离样本均值可以更好地表示像素的特殊性。最终的IBC图u计算公式:
当其中一个图像区域大部分被前景占据时,上述公式更加具有鲁棒性。最后我们缩放U的值,让它最大值为1。
最终,我们把B和U线性组合相加,得到图B+,可以大大提升性能。
4.3. Postprocessing
首先,为了在保持有效边界细节的同时平滑S,我们在S上应用形态学平滑步骤,先膨胀后腐蚀。通过对宽度为δ的源图像进行腐蚀(膨胀),得到了膨胀重建的标记图。δ由下式得到:
![]()
其中a是预定义常数,s是B的平均像素值。
为了计算在许多显著的目标检测数据集中观察到的中心偏差,我们用一个无参数中心映射C逐像素乘S,定义如下:

最后,我们对S的值进行缩放,使其最大值为1,并对S进行对比度增强操作,该操作使用sigmoid函数增强前景和背景区域的对比度:

b是一个预定义的参数,用于控制对比度级别。
5. Experiments
在我们的处理中,输入图像先被调整为最大维数是300像素,在9式中的a值取50,假设颜色值在[0,1]内,我们把11式中的b设定为10。在4.2节中提到的边界宽度 r 取30。我们其实在实践中会发现我们的算法对这些参数的设定并不敏感。
缺陷:
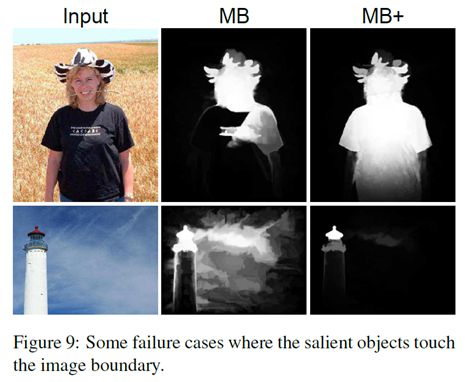
图像边界和前景相互接触时,会导致MB的效果不好,如果前景和背景像素差异大,那么MB+可以解决这类问题,如果前背景差异不大,MB+效果也会不好。
算法流程
1. 将待处理图像resize为最大维度300像素,分解为三通道的三幅灰度图像
2. dowork -> computeSaliency -> fastMBS ->getSaliencyMap,得到MBmap,它是把上一步每个通道代表的灰度图像分别计算D(t),再全部累加起来得到的。
参照论文算法流程图:

3. 根据4.3节9式,进行先膨胀后腐蚀的平滑,得到morphmat。
4. 根据4.3节11式,增大前景和背景的对比度,得到smallres。
5. resize回原来大小,得到res。