LK光流算法及其opencv的自定义实现
折腾了一天LK光流算法,从原理、公式到代码,为了自己回顾方便以及其他读者参考,花了一些时间把今天所做的工作整理并分享出来
光流原理:
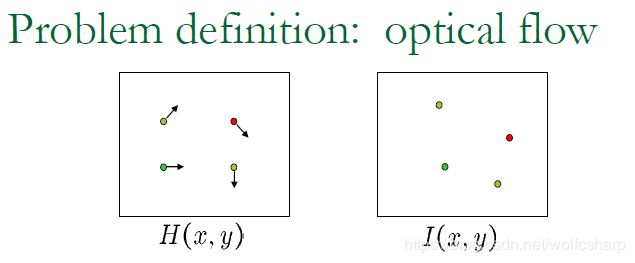
由于摄像机系统将三维场景转换为二维图像丢失了很多信息,因此要在二维图像中估计物体的运动情况就需要引入额外的信息。光流算法就是通过引入前后两帧图像的差异,从而将现实世界的运动场转换成成二维图像中的光流场。
前一帧图片表示为H(x,y),后一帧图片表示为I(x,y)

两帧图片在x方向有u个像素的位移,在y方向有v个像素的位移
光流问题推导三大假设:

(1)brightness constancy
H(x,y)中的点与I(x,y)中目标对应的点(注意不是像素对应的点)灰度值相等
可以列出方程:
H(x,y)= I(x+u,y+v)
(2)spatial coherence
认为相邻像素运动场近似相同,运动场是空间相关的
(3)small motion
微小的运动,这是光流算法work的基础
公式推导
因为假设(3),u、v都足够小,因此可以对I(x+u,y+v)进行泰勒级数展开,并且忽略高阶项:

由假设1,H(x,y)= I(x+u,y+v),所以
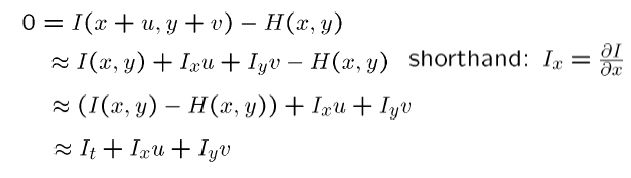
用矩阵表示即
![]()
以上方程是光流问题的基本求解方程。
Lucas-Kanade(LK)光流:
LK解法是光流基本方程解法中的一种,目前popular for稀疏光流的求解

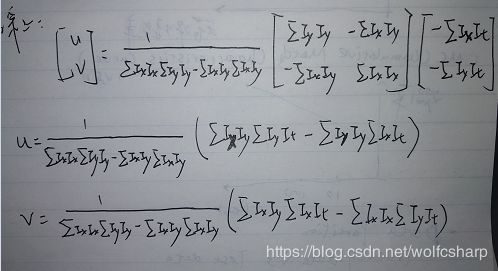
因为假设(2),光流场是spatial coherence的,因此取一个k by k的window,这里假设k=5,于是用最小二乘法有

公式

中的求和号是对k by k的window中的所有元素进行求和

下面的问题就是矩阵求逆的解法:
这里采用伴随矩阵求逆的方法,假设矩阵A,那么矩阵A的逆为
![]()
其中|A|是矩阵的秩,A*是矩阵A的伴随矩阵
百度的伴随矩阵求法:

所以,我们的问题求解为

公式推导完毕,下面是算法代码,代码已经添加注释,运行环境VS2013+opencv3.4.1
测试图片包,可以点击这里下载,里面包含多个场景的多帧图片
代码:
#include
#include "opencv2/imgproc/imgproc.hpp"
#include
#include "opencv2/core/core.hpp"
#include "opencv2/highgui/highgui.hpp"
#include
#include
#define ATD at
using namespace cv;
using namespace std;
//用两帧图片获得Ix
Mat get_Ix(Mat &src1, Mat &src2)
{
Mat Ix;
Mat kernal = Mat::ones(2, 2, CV_64FC1);
kernal.ATD(0, 0) = -1.0;
kernal.ATD(1, 0) = -1.0;
Mat dst1, dst2;
filter2D(src1, dst1, -1, kernal);
filter2D(src2, dst2, -1, kernal);
Ix = dst1 + dst2;
return Ix;
}
//用两帧图片获得Iy
Mat get_Iy(Mat &src1, Mat &src2)
{
Mat Iy;
Mat kernal = Mat::ones(2, 2, CV_64FC1);
kernal.ATD(0, 0) = -1.0;
kernal.ATD(0, 1) = -1.0;
Mat dst1, dst2;
filter2D(src1, dst1, -1, kernal);
filter2D(src2, dst2, -1, kernal);
Iy = dst1 + dst2;
return Iy;
}
//用两帧图片获得It
Mat get_It(Mat &src1, Mat &src2)
{
Mat It;
Mat kernal = Mat::ones(2, 2, CV_64FC1);
kernal = kernal.mul(-1);
Mat dst1, dst2;
filter2D(src1, dst1, -1, kernal);
kernal = kernal.mul(-1);
filter2D(src2, dst2, -1, kernal);
It = dst1 + dst2;
return It;
}
//取3*3的窗口,做9个值的和
Mat get_sum9(Mat &m)
{
Mat sum9;
Mat kernal = Mat::ones(3, 3, CV_64FC1);
filter2D(m, sum9, -1, kernal);
return sum9;
}
//LK算法实现
//输入:两帧图片 img1和img2
//输出:计算结果 u(x方向光流)和v(y方向光流)
void getLucasKanadeOpticalFlow(Mat &img1, Mat &img2, Mat &u, Mat &v)
{
Mat Ix = get_Ix(img1, img2);
Mat Iy = get_Iy(img1, img2);
Mat It = get_It(img1, img2);
Mat Ix2 = Ix.mul(Ix);
Mat Iy2 = Iy.mul(Iy);
Mat IxIy = Ix.mul(Iy);
Mat IxIt = Ix.mul(It);
Mat IyIt = Iy.mul(It);
Mat Ix2_sum9 = get_sum9(Ix2);
Mat Iy2_sum9 = get_sum9(Iy2);
Mat IxIy_sum9 = get_sum9(IxIy);
Mat IxIt_sum9 = get_sum9(IxIt);
Mat IyIt_sum9 = get_sum9(IyIt);
Mat det = (Ix2_sum9.mul(Iy2_sum9) - IxIy_sum9.mul(IxIy_sum9))*10;//A的行列式计算(二阶),这里*10是为了光流限幅
u = IxIy_sum9.mul(IyIt_sum9) - Iy2_sum9.mul(IxIt_sum9);//算出u*det
v = IxIy_sum9.mul(IxIt_sum9) - Ix2_sum9.mul(IyIt_sum9);//算出v*det
divide(u, det, u);//算出u
divide(v, det, v);//算出v
}
//在一张图片img上根据u和v画出光流场
void draw_optical_flow(Mat &img, Mat &u, Mat &v)
{
int width = img.cols;//y
int height = img.rows;//x
int newi, newj;//加入光流后的新坐标
for (int i = 0; i < height; i++)//遍历x
{
for (int j = 0; j < width; j++)//遍历y
{
newi = i + int(u.ATD(i, j));//加入光流之后的新x坐标
newj = j + int(v.ATD(i, j));//加入光流之后的新y坐标
if (newi >= 0 && newi = 0 && newj < width)//对边界进行限制,防止内存溢出
{
if ((u.ATD(i, j) + v.ATD(i, j)>2) && (u.ATD(i, j) + v.ATD(i,j)<40))//光流滤波,参数2-40
{
circle(img, Point(newj, newi), 1, Scalar(0, 0, 255));//在新坐标点画圆,半径为1,颜色红色
line(img, Point(j, i), Point(newj, newi), Scalar(0, 0,255));//两个点之间画线,颜色红色
}
}
}
}
}
void main()
{
//用前后两帧图片做测试
Mat img1 = imread("frame08.png", 0);//参数:图片名称,0以灰度方式读入
Mat img2 = imread("frame09.png", 0);
img1.convertTo(img1, CV_64FC1, 1.0/255, 0);//如果用imshow()的话,需要写成1.0/255
img2.convertTo(img2, CV_64FC1, 1.0/255, 0);//如果用imwrite()的话,需要写成1, 并不影响实际光流计算结果
Mat u = Mat::zeros(img1.rows, img1.cols, CV_64FC1);
Mat v = Mat::zeros(img1.rows, img1.cols, CV_64FC1);
getLucasKanadeOpticalFlow(img1, img2, u, v);
imshow("u", u);
imshow("v", v);
Mat img = imread("frame08.png");//重新读入彩色图片
draw_optical_flow(img, u, v);//在这张图片上画出光流结果
imshow("optical_flowflow", img);
imwrite("optical_flow.jpg",img);
waitKey(0);
}
注意,为了减少计算量,这里取用的窗口是3*3的,实际速度还可以
LK光流运行结果:
