RT-Thread Stm32f103开启UART2(DMA接收及轮询发送) 使用RT-Thread Studio
RT-Thread Stm32f103开启UART2 使用RT-Thread Studio
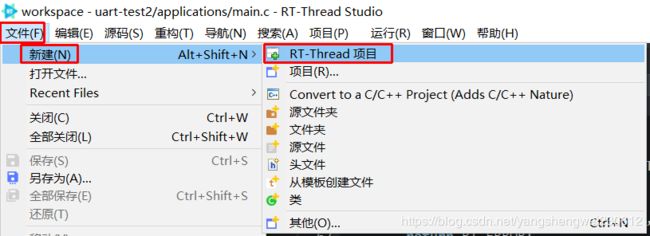
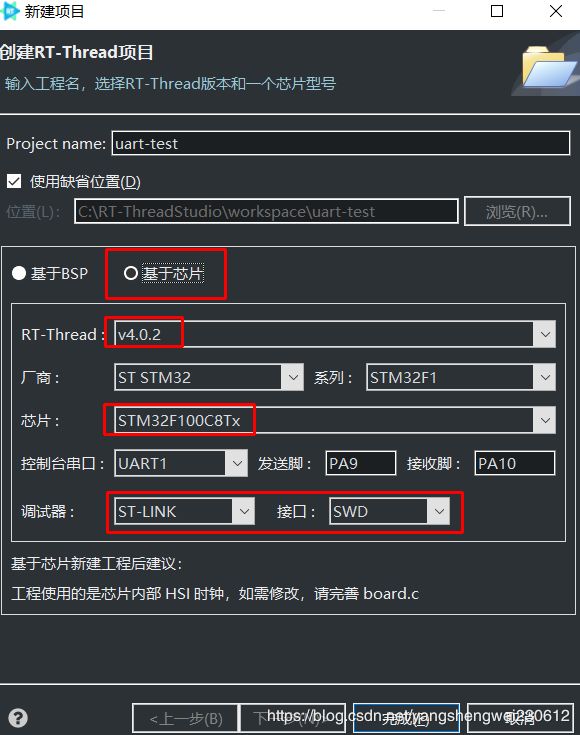
1. 使用RT-Thread Studio新建RT-Thread项目
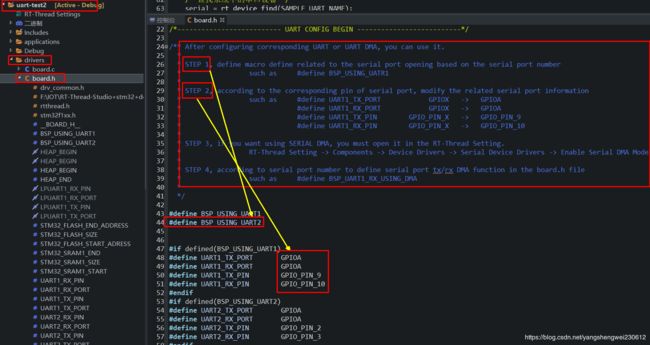
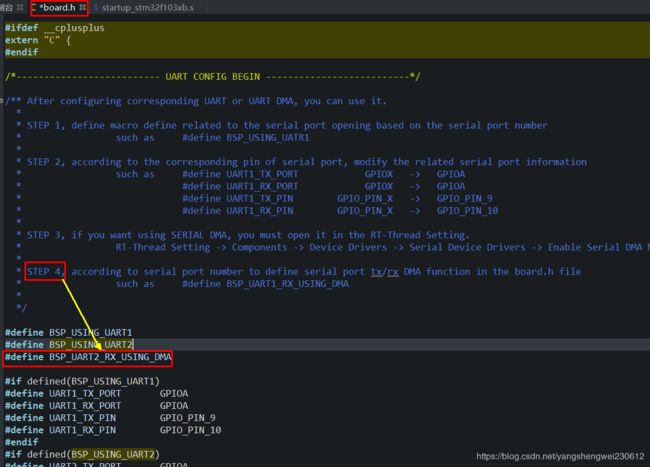
2. 修改dricer->doard.h
*STEP 1, define macro define related to the serial port opening based on the serial port number
* such as #define BSP_USING_UATR1
*
* STEP 2, according to the corresponding pin of serial port, modify the related serial port information
* such as #define UART1_TX_PORT GPIOX -> GPIOA
* #define UART1_RX_PORT GPIOX -> GPIOA
* #define UART1_TX_PIN GPIO_PIN_X -> GPIO_PIN_9
* #define UART1_RX_PIN GPIO_PIN_X -> GPIO_PIN_10
增加UART2的宏定义
设置gpio接口
*STEP 3, if you want using SERIAL DMA, you must open it in the RT-Thread Setting.
* RT-Thread Setting -> Components -> Device Drivers -> Serial Device Drivers -> Enable Serial DMA Mode
*
* STEP 4, according to serial port number to define serial port tx/rx DMA function in the board.h file
* such as #define BSP_UART1_RX_USING_DMA



3. 串口设备使用示例
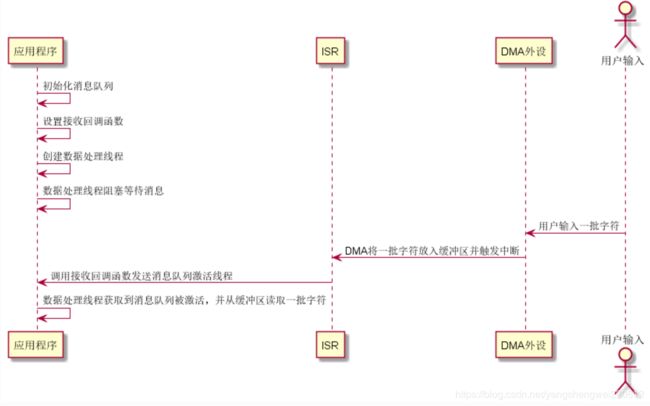
DMA 接收及轮询发送
当串口接收到一批数据后会调用接收回调函数,接收回调函数会把此时缓冲区的数据大小通过消息队列发送给等待的数据处理线程。线程获取到消息后被激活,并读取数据。一般情况下 DMA 接收模式会结合 DMA 接收完成中断和串口空闲中断完成数据接收。
此示例代码不局限于特定的 BSP,根据 BSP 注册的串口设备,修改示例代码宏定义 SAMPLE_UART_NAME 对应的串口设备名称即可运行。
运行序列图如下图所示:
main.c
#include 4. 运行结果
代码中设置的串口波特率为9600