ZYNQ linux下AXI_BRAM的使用方法,PS与PL端数据交互
1、AXI总线、AXI接口、AXI协议
总线是一组传输通道,是各种逻辑器件构成的传输数据的通道;接口是一种连接标准,又常被称为物理接口;协议是数据传输的规则。
PS与PL连接方式主要是通过AXI总线进行的。ZYNQ上的总线协议有AXI4, AXI4-Lite, AXI4-Stream三种总线协议。而PS与PL之间的接口(AXI-GP、AXI-HP、AXI-ACP)只支持AXI4与AXI4-Lite这两种总线协议。
2、BRAM简介
Block RAM是PL部分的存储器阵列,就相当于在PL中开辟一片空间来存储数据,通过端口来进行读写。
BRAM设置模式:
1、单端口:通过一个端口对BRAM进行读写。
2、简单双端口:有两个端口连接到BRAM,一个端口只读,一个端口只写
3、真双端口:两个端口都可以对BRAM进行读写。
3、vivado设计
前提:创建好了工程并导入了ZYNQ核
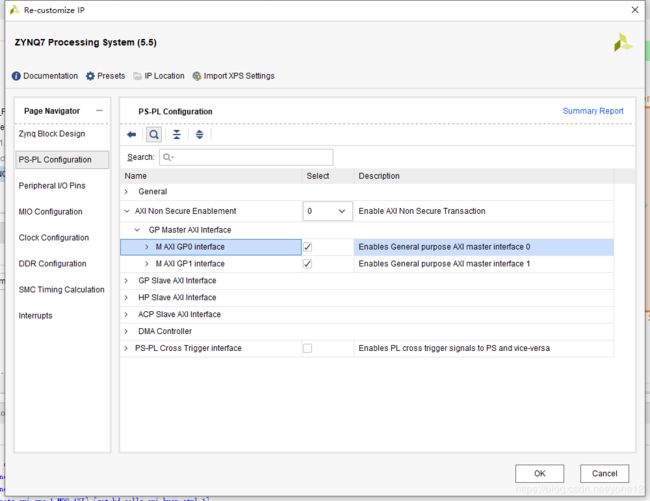
打开AXI GP0 和 AXI GP1的接口
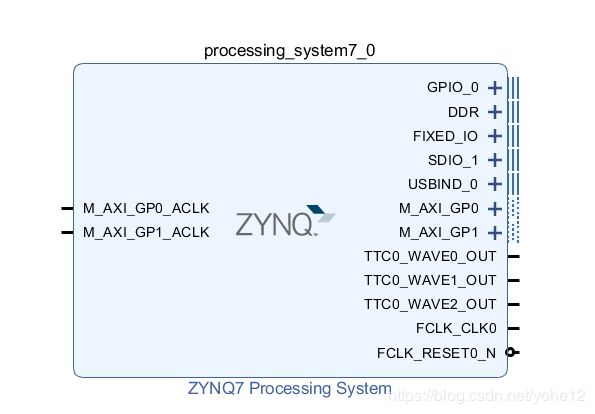
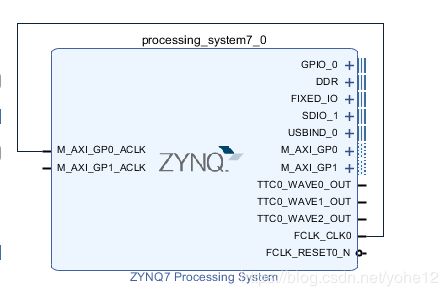
将M_AXI_GP0_ACLK连接到FCLK_CLK0
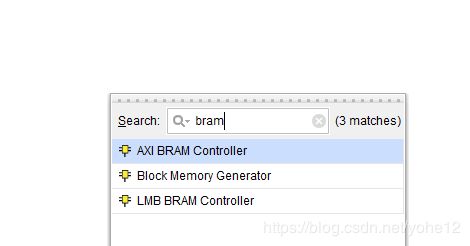
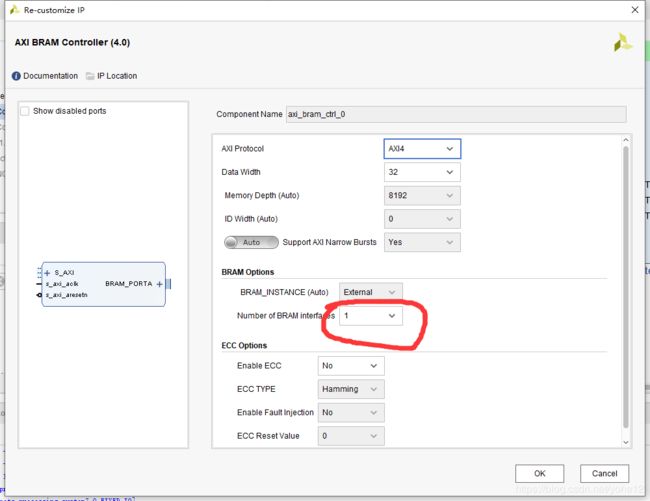
导入两个BRAM 控制器
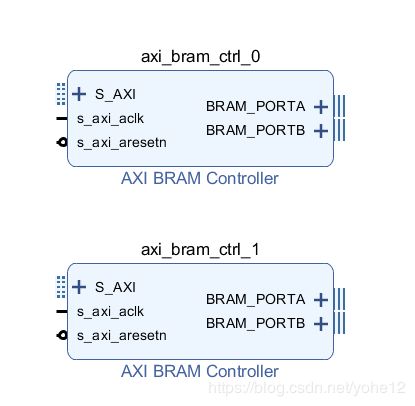
设置为单端口
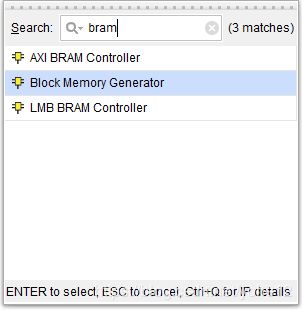
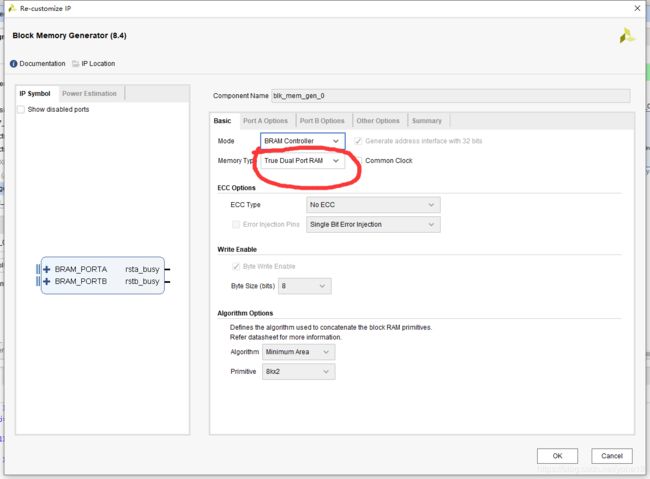
导入一个BRAM
设置为真双端口模式
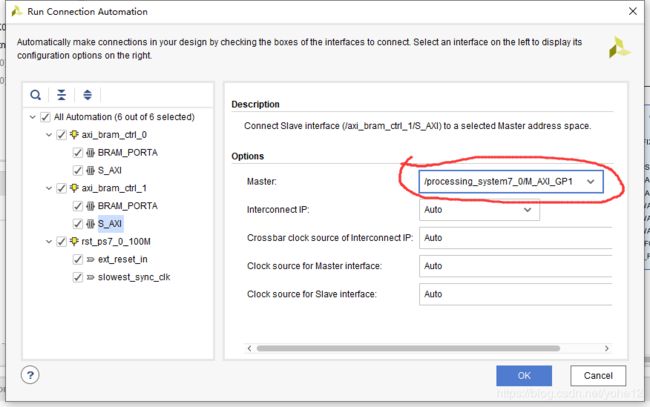
进行设计连接
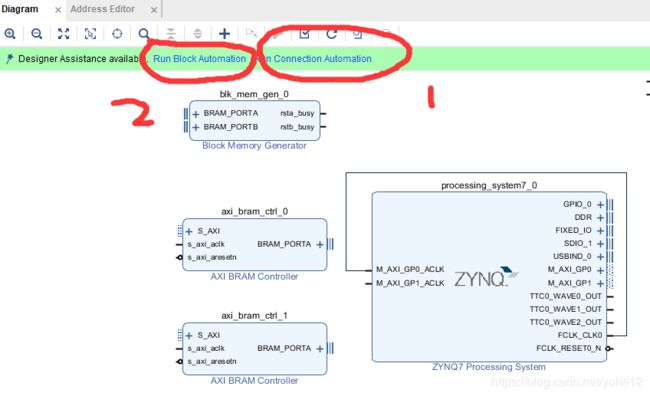
进行1的时候需要修改主机从GP0 改为GP1
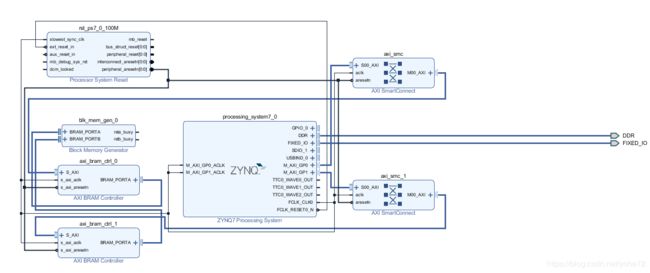
最终的生成图
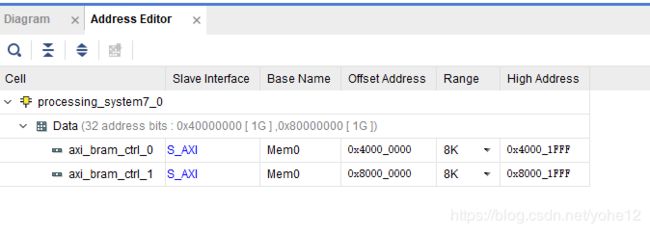
可以在address editor中查看自动分配的BRAM控制器的地址,不要随意更改地址,因为其他地址可能被其他设备占用了。
axi_bram_ctrl_0 0x40000000
axi_bram_ctrl_1 0x80000000
接下来生成bit流,将硬件资源导入petlainux中,生成BOOT.BIN 和image.ub
将生成的BOOT.BIN和内核放到板子上,启动系统。
进行编程:
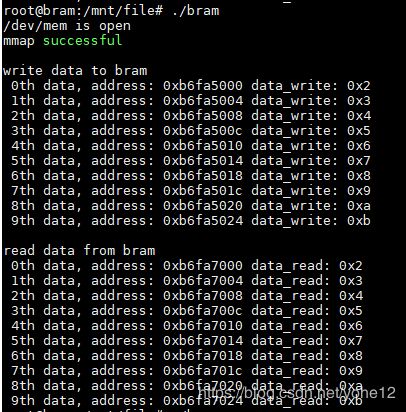
#include 运行效果
也可以将BRAM与socket进行联合使用,将PC端的数据发到PS端,PS端放在PL端,PL端再发给PS端,PS端发回PC端。
#include 最终实现相关效果
