OpenCV-Python——实现圆形检测与追踪
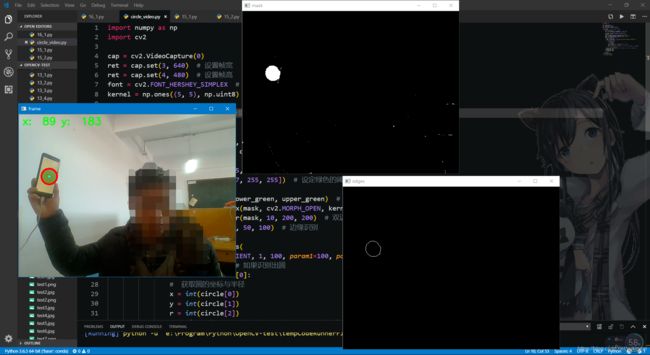
主要实现的功能是能实时识别视频中的绿色圆,并返回圆心位置,这既是对前面所学知识的总结,也是为下一步摄像头的追踪打下基础。
opencv的安装可参考https://blog.csdn.net/yukinoai/article/details/83088190
废话不多说,代码如下,环境为win10,python3:
import numpy as np
import cv2
cap = cv2.VideoCapture(0)
ret = cap.set(3, 640) # 设置帧宽
ret = cap.set(4, 480) # 设置帧高
font = cv2.FONT_HERSHEY_SIMPLEX # 设置字体样式
kernel = np.ones((5, 5), np.uint8) # 卷积核
if cap.isOpened() is True: # 检查摄像头是否正常启动
while(True):
ret, frame = cap.read()
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) # 转换为灰色通道
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV) # 转换为HSV空间
lower_green = np.array([35, 50, 100]) # 设定绿色的阈值下限
upper_green = np.array([77, 255, 255]) # 设定绿色的阈值上限
# 消除噪声
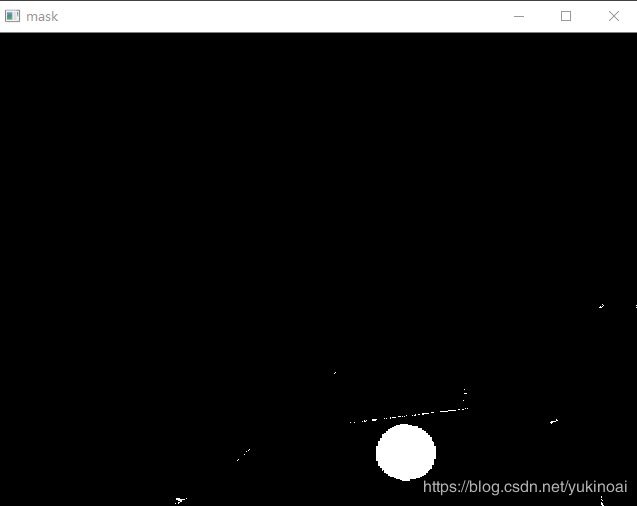
mask = cv2.inRange(hsv, lower_green, upper_green) # 设定掩膜取值范围
opening = cv2.morphologyEx(mask, cv2.MORPH_OPEN, kernel) # 形态学开运算
bila = cv2.bilateralFilter(mask, 10, 200, 200) # 双边滤波消除噪声
edges = cv2.Canny(opening, 50, 100) # 边缘识别
# 识别圆形
circles = cv2.HoughCircles(
edges, cv2.HOUGH_GRADIENT, 1, 100, param1=100, param2=10, minRadius=10, maxRadius=500)
if circles is not None: # 如果识别出圆
for circle in circles[0]:
# 获取圆的坐标与半径
x = int(circle[0])
y = int(circle[1])
r = int(circle[2])
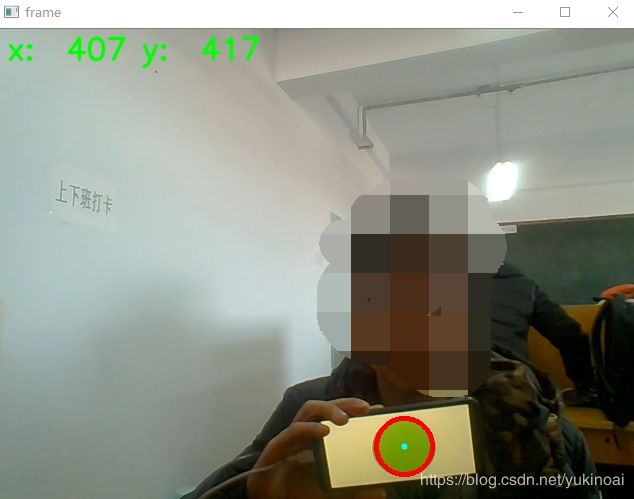
cv2.circle(frame, (x, y), r, (0, 0, 255), 3) # 标记圆
cv2.circle(frame, (x, y), 3, (255, 255, 0), -1) # 标记圆心
text = 'x: '+str(x)+' y: '+str(y)
cv2.putText(frame, text, (10, 30), font, 1, (0, 255, 0), 2, cv2.LINE_AA, 0) # 显示圆心位置
else:
# 如果识别不出,显示圆心不存在
cv2.putText(frame, 'x: None y: None', (10, 30), font, 1, (0, 255, 0), 2, cv2.LINE_AA, 0)
cv2.imshow('frame', frame)
cv2.imshow('mask', mask)
cv2.imshow('edges', edges)
k = cv2.waitKey(5) & 0xFF
if k == 27:
break
cap.release()
cv2.destroyAllWindows()
else:
print('cap is not opened!')
结果如下:
输出图像frame:
掩膜mask:
边界edge: