二维离散余弦变换(DCT)与二维离散反余弦变换(IDCT)C语言实现
二维离散余弦变换(DCT)与二维离散反余弦变换(IDCT)C语言实现
实验目标
对一个8x8的矩阵进行DCT和IDCT然后在观察前者和后者的变化
实验准备
理论基础
二维离散余弦变换
F ( u , v ) = c ( u ) c ( v ) ∑ i = 0 N − 1 ∑ i = 0 N − 1 f ( i , j ) cos [ ( i + 0.5 ) π N u ] cos [ ( i + 0.5 ) π N v ] F(u,v)=c(u)c(v)\sum_{i=0}^{N-1}\sum_{i=0}^{N-1}f(i,j)\cos{[\frac{(i+0.5)\pi}{N}u]}\cos{[\frac{(i+0.5)\pi}{N}v]} F(u,v)=c(u)c(v)i=0∑N−1i=0∑N−1f(i,j)cos[N(i+0.5)πu]cos[N(i+0.5)πv]
c ( u ) = { 1 N , u = 0 2 N , u ≠ 0 c(u)=\begin{cases}\sqrt{\frac{1}{N}}, & u=0 \\ \sqrt{\frac{2}{N}}, & u\neq0\end{cases} c(u)=⎩⎨⎧N1,N2,u=0u=0
二维离散反余弦变换
f ( i , j ) = ∑ u = 0 N − 1 ∑ v = 0 N − 1 c ( u ) c ( v ) F ( u , v ) cos [ ( i + 0.5 ) π N u ] cos [ ( j + 0.5 ) π N v ] f(i,j)=\sum_{u=0}^{N-1}\sum_{v=0}^{N-1}c(u)c(v)F(u,v)\cos[\frac{(i+0.5)\pi}{N}u]\cos[\frac{(j+0.5)\pi}{N}v] f(i,j)=u=0∑N−1v=0∑N−1c(u)c(v)F(u,v)cos[N(i+0.5)πu]cos[N(j+0.5)πv]
c ( u ) = { 1 N , u = 0 2 N , u ≠ 0 c(u)=\begin{cases}\sqrt{\frac{1}{N}}, & u=0 \\ \sqrt{\frac{2}{N}}, & u\neq0\end{cases} c(u)=⎩⎨⎧N1,N2,u=0u=0
具体公式理解就不讲了,高中知识就可以理解
实验结果
实验过程
/*
剑一
blog: www.leon7777.online
github:www.github.com/zpf996
emil: [email protected]
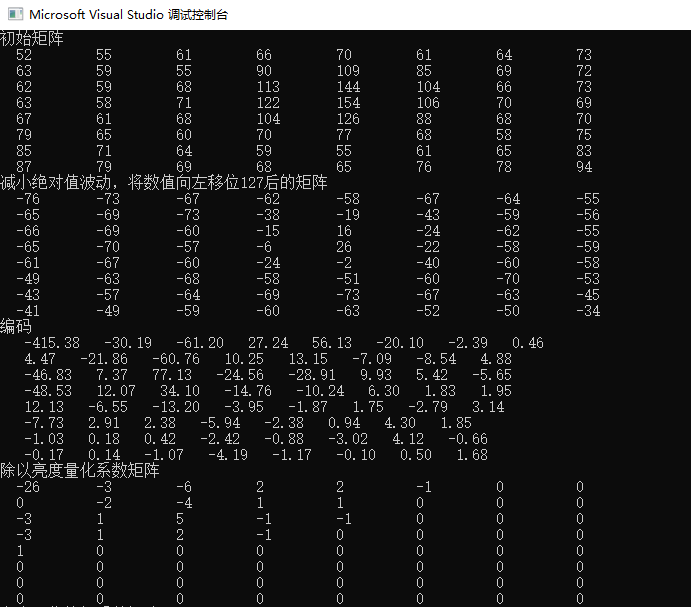
步骤:
1、向左位移127
2、编码:DCT变换
3、除以量化矩阵
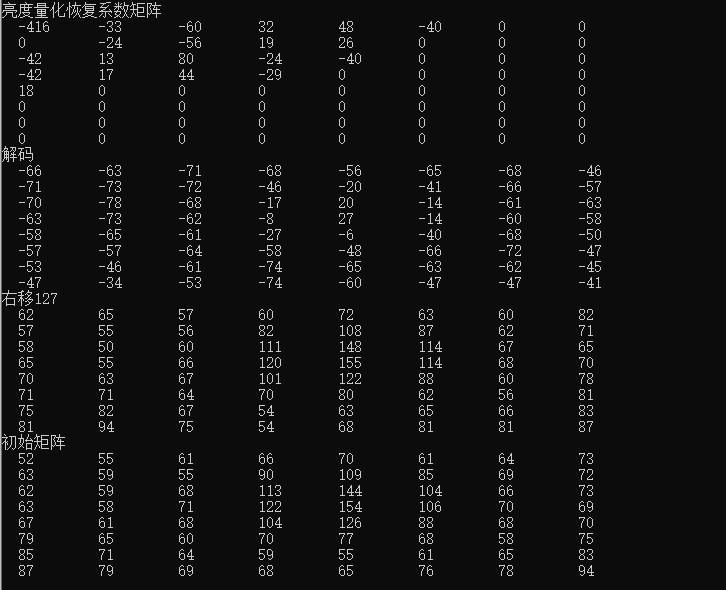
4、解码:IDCT变换
5、向右位移127
*/
#include