单纯形法、拉格朗日乘子法和scipy库对比分析求解线性规划
单纯形法、拉格朗日乘子法和scipy库对比分析求解线性规划
一、单纯形法的简单了解
1、单纯形法的定义
1)、单纯形法 simplex method 求解线性规划问题的通用方法。单纯形是美国数学家G.B.丹齐克于1947年首先提出来的。它的理论根据是:线性规划问题的可行域是 n维向量空间Rn中的多面凸集,其最优值如果存在必在该凸集的某顶点处达到。顶点所对应的可行解称为基本可行解。
2、单纯形法的基本思路
1)、单纯形法的基本思想是:先找出一个基本可行解,对它进行鉴别,看是否是最优解;若不是,则按照一定法则转换到另一改进的基本可行解,再鉴别;若仍不是,则再转换,按此重复进行。因基本可行解的个数有限,故经有限次转换必能得出问题的最优解。如果问题无最优解也可用此法判别。 根据单纯形法的原理,在线性规划问题中,决策变量(控制变量)x1,x2,…x n的值称为一个解,满足所有的约束条件的解称为可行解。使目标函数达到最大值(或最小值)的可行解称为最优解。这样,一个最优解能在整个由约束条件所确定的可行区域内使目标函数达到最大值(或最小值)。求解线性规划问题的目的就是要找出最优解。
3、单纯形法的解题步骤
1)、把线性规划问题的约束方程组表达成典范型方程组,找出基本可行解作为初始基本可行解。
2)、若基本可行解不存在,即约束条件有矛盾,则问题无解。
3)、若基本可行解存在,从初始基本可行解作为起点,根据最优性条件和可行性条件,引入非基变量取代某一基变量,找出目标函数值更优的另一基本可行解
4)、按步骤3进行迭代,直到对应检验数满足最优性条件(这时目标函数值不能再改善),即得到问题的最优解。
5)、若迭代过程中发现问题的目标函数值无界,则终止迭代。
二、求解以下约束条件的线性规划的最大值和最优解
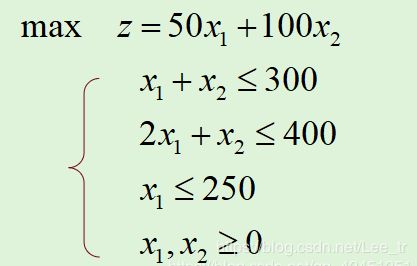
1.通过单纯形法求解线性规划最优解和最大值
1)、新建txt文档,写入标准化模型系数,如下所示:
50 100 0 0 0 0
1 1 1 0 0 300
2 1 0 1 0 400
0 1 0 0 1 250
2)、编写python代码
import numpy as np
def pivot(d,bn):
l = list(d[0][:-2])
jnum = l.index(max(l)) #转入编号
m = []
for i in range(bn):
if d[i][jnum] == 0:
m.append(0.)
else:
m.append(d[i][-1]/d[i][jnum])
inum = m.index(min([x for x in m[1:] if x!=0])) #转出下标
s[inum-1] = jnum
r = d[inum][jnum]
d[inum] /= r
for i in [x for x in range(bn) if x !=inum]:
r = d[i][jnum]
d[i] -= r * d[inum]
def solve(d,bn):
flag = True
while flag:
if max(list(d[0][:-1])) <= 0: #直至所有系数小于等于0
flag = False
else:
pivot(d,bn)
def printSol(d,cn):
for i in range(cn - 1):
if i in s:
print("x"+str(i)+"=%.2f" % d[s.index(i)+1][-1])
else:
print("x"+str(i)+"=0.00")
print("objective is %.2f"%(-d[0][-1]))
d = np.loadtxt("D:\\my.txt", dtype=np.float)
(bn,cn) = d.shape
s = list(range(cn-bn,cn-1)) #基变量列表
solve(d,bn)
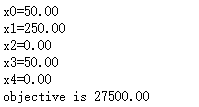
printSol(d,cn)
运行结果如下所示:
2.通过python中的scipy库对线性规划的最优解、最大值进行求解
1)、代码如下:
#导入包
from scipy import optimize
import numpy as np
#确定c,A_ub,B_ub
c = np.array([50,100])
A_ub = np.array([[1,1],[2,1],[0,1]])
B_ub = np.array([300,400,250])
#求解
res =optimize.linprog(-c,A_ub,B_ub)
print(res)
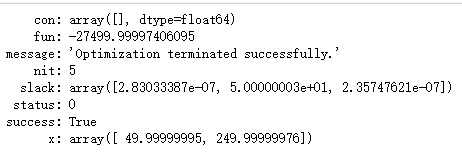
2)、运行结果如下:
3.通过拉格朗日乘子法求解极值
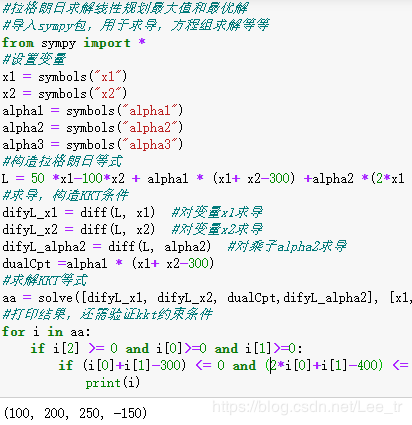
1)、代码如下:
#拉格朗日求解线性规划最大值和最优解
#导入sympy包,用于求导,方程组求解等等
from sympy import *
#设置变量
x1 = symbols("x1")
x2 = symbols("x2")
alpha1 = symbols("alpha1")
alpha2 = symbols("alpha2")
alpha3 = symbols("alpha3")
#构造拉格朗日等式
L = 50 *x1-100*x2 + alpha1 * (x1+ x2-300) +alpha2 *(2*x1 + x2-400)
#求导,构造KKT条件
difyL_x1 = diff(L, x1) #对变量x1求导
difyL_x2 = diff(L, x2) #对变量x2求导
difyL_alpha2 = diff(L, alpha2) #对乘子alpha2求导
dualCpt =alpha1 * (x1+ x2-300)
#求解KKT等式
aa = solve([difyL_x1, difyL_x2, dualCpt,difyL_alpha2], [x1, x2,alpha1,alpha2])
#打印结果,还需验证kkt约束条件
for i in aa:
if i[2] >= 0 and i[0]>=0 and i[1]>=0:
if (i[0]+i[1]-300) <= 0 and (2*i[0]+i[1]-400) <= 0 and (i[0]-250)<=0:
print(i)
2)、运行结果如下:
最后,以上就是所有内容啦!