一个关于Perceptron 的C++程序part1
PerceptronA basic single layer perceptron。
在看程序之前, 首先看看Perceptron的含义。
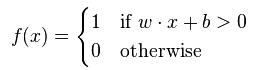
perceptron(感知器)就是一个学习一个binary classifier的算法。 实质上, 就是一个将输入的x(a real-valued vector )映射为f(x)值的函数:
NOTE: 参见深度学习1的介绍。
下面做出如下解释:
函数f(x)的值(非0即1)(根据样本的特征向量x计算函数值) , 对样本x 进行分类。 若b 为负值, 那么输入各维特征的加权和只有大于![]() , 才能使得我们的Perceptron计算的加权和大于0, 使得我们的样本归为正样本。改变bias b的值, 我们的decision boundary (方程为 w x + b = 0)也会发生平移改变。这是显而易见的。
, 才能使得我们的Perceptron计算的加权和大于0, 使得我们的样本归为正样本。改变bias b的值, 我们的decision boundary (方程为 w x + b = 0)也会发生平移改变。这是显而易见的。
但是, 如果我们的学习训练样本不是线性可分的, 那么我们的Perceptron 永远无法达到对所有的样本正确分类的时候。 因为一个线性的decision boudary(超平面) 不可能完全将一个线性不可分的(non-linear separable)样本集分开。perceptron 算法无法解决的一个典型线性不可分的问题就是异或问题。
在神经网络中, percetron 就是使用Heaviside step function 作为激活函数(activation function)。 perceptron algorithm 常常也被称作single-layer perceptron, 以便和multilayer perceptron 算法做出区别。 作为一个线性分类器, single-layer Perceptron 是最简单的feedforward neural network(前馈神经网络)。
下面我们介绍关于single-layer Perceptron的学习算法。当然, 当函数是非线性的, 而且可微的时候, 我们也可以使用dela rule 解决 single-layer perceptron.。(当然, 对于具有hidden layer 的multi-layer perceptrons, 下面的算法就不合适了。 此时必须用更加sophisticated 算法诸如BP算法。) Anyway, 这里介绍下面的一种。
在开始之前, 首先preprocessing, 定义如下变量:
- 代表对
 于一个 input vector
于一个 input vector  输入时的输出
输入时的输出  定义为bias 项, 在下面, 我们设定为0
定义为bias 项, 在下面, 我们设定为0 为s个训练样本集合,其中: (1)
为s个训练样本集合,其中: (1)  为一个
为一个  -dimensional input vector
-dimensional input vector
 is the desired output value of the perceptron for that input.
is the desired output value of the perceptron for that input.
为了代表对应的特征, 我们如下定义:
1. 
 th 训练样本的输入的特征向量的第i维特征的值大小, 我们规定
th 训练样本的输入的特征向量的第i维特征的值大小, 我们规定 (即第一维特征).
(即第一维特征).
为了描述权值, 我们如下定义:
1.  是权值向量第
是权值向量第 th个权值的大小, 这个值会同特征向量的第i维特征相乘, 或者说就是第i 维特征的权重
th个权值的大小, 这个值会同特征向量的第i维特征相乘, 或者说就是第i 维特征的权重
2. 由于我们定义 , 所以权值  就隐含的代表了bias b项
就隐含的代表了bias b项
为了表明权值向量 ,是time-dependence, 我们按照如下方式表达权值:
,是time-dependence, 我们按照如下方式表达权值:
1. 是
是 时刻, 权值向量第维权值的大小
时刻, 权值向量第维权值的大小
2.  是 learning rate, 取值范围为:
是 learning rate, 取值范围为: 
定义完了如上的各种变量, 下面, 我们开始学习。 具体steps 如下:
step1:对所有的weights和threshold初始化。 所有的weightes 可能被初始化为0或者某一个小的随机的值,
在下面的程序中, 我们选择将所有的weightes 初始化为0
step2: 对于训练集![]() 中的每一个样本
中的每一个样本  , 关于该训练样本的特征向量
, 关于该训练样本的特征向量  和 期望的输出标记 , 执行如下两步操作:
和 期望的输出标记 , 执行如下两步操作:
2.1: 计算实际的输出:![]()
2.2: 按照如下方式更新权重:
![]()
step3: 对于offline learning(离线学习), 重复执行step2, 直至迭代误差函数( iteration error ) 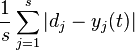 的值小于我们指定的error
的值小于我们指定的error
threshold ![]() , 或者达到我们预定的迭代次数, 我们才停止继续学习。
, 或者达到我们预定的迭代次数, 我们才停止继续学习。
NOTE: 对于训练样本集中的每一个样本, 该算法将updates 权重,然后作用于下一个样本, 更新权重, 一次进行下去, 直至
样本集中所有的样本作用了一遍。 而不是遍历玩所有的样本再更新权重。