【学习笔记】动态规划—斜率优化DP(超详细)
【前言】
第一次写这么长的文章。
写完后感觉对斜优的理解又加深了一些。
斜优通常与决策单调性同时出现。可以说决策单调性是斜率优化的前提。
斜率优化 \(DP\),顾名思义就是利用斜率相关性质对 \(DP\) 进行优化。
斜率优化通常可以由两种方式来理解,需要灵活地运用数学上的数形结合,线性规划思想。
对于这样形式的 \(dp\) 方程:\(dp[i]=Min/Max(a[i]∗b[j]+c[j]+d[i])\),其中 \(b\) 严格单调递增。
该方程的关键点在于 \(a[i]*b[j]\) 这一项,它既有 \(i\) 又有 \(j\),于是单调队列优化不再适用,可以尝试使用斜率优化。
一.【决策单调性证明】
这里以 玩具装箱 \(toy\) \([P3195]\) 为例,先来证一波决策单调性,方法采用四边形不等式。
设 \(S[n]=\sum _{i=1}^n (C[i]+1)\),用 \(dp[i]\) 表示装好前 \(i\) 个的最小花费,则 \(dp\) 方程为:\(dp[i]=min(dp[j]+(S[i]−S[j]-1-L)^2)\)。
很明显,这个方程以 \(dp[i]=min(dp[j]+w(i,j))\) 的形式呈现,即 \(1D/1D\) 动态规划方程,其中 \(w(i,j)=(S[i]−S[j]-1-L)^2\)。
\(证明:设\) \(Q=S[i]−S[j]-1-L\)
\(\therefore w(i,j)=(S[i]−S[j]-1-L)^2=Q^2\)
\(\begin{equation*} \begin{split} \therefore w(i+1,j+1)=&(S[i+1]−S[j+1]-1-L)^2\\ =&((S[i]+C[i+1]+1)−(S[j]+C[j+1]+1)-1-L)^2\\ =&(Q+C[i+1]-C[j+1])^2 \end{split} \end{equation*}\)
\(\begin{equation*} \begin{split} w(i,j+1)=&(S[i]−S[j+1]-1-L)^2\\ =&(S[i]−(S[j]+C[j+1]+1)-1-L)^2\\ =&(Q-C[j+1]-1)^2 \end{split} \end{equation*}\)
\(\begin{equation*} \begin{split} w(i+1,j)=&(S[i+1]−S[j]-1-L)^2\\ =&((S[i]+C[i+1]+1)−S[j]-1-L)^2\\ =&(Q+C[i+1]+1)^2 \end{split} \end{equation*}\)
\(\therefore w(i,j)+w(i+1,j+1)=2X^2+2C[i+1]X-2C[j+1]X+C[i+1]^2-2C[i+1]C[j+1]+C[j+1]^2\)
\(\therefore w(i+1,j)+w(i,j+1)=2X^2+2C[i+1]X-2C[j+1]X+C[i+1]^2+2C[i+1]+2C[j+1]+C[j+1]^2+2\)
\(\therefore w(i,j)+w(i+1,j+1)-w(i+1,j)+w(i,j+1)=-2(C[i+1]+1)(C[j+1]+1)\)
\(又 \because C[i],C[j] \geqslant 1\)
\(\therefore -2(C[i+1]+1)(C[j+1]+1) \leqslant -8\)
\(\therefore w(i,j)+w(i+1,j+1) \leqslant w(i+1,j)+w(i,j+1)\)
四边形不等式成立,所以次题具有决策单调性。
在实战中,通常使用打表的形式来判断是否满足四边形不等式。
二.【理解方式】
还是以 玩具装箱 \(toy\) \([P3195]\) 为例,两种斜优的理解方式。
决策方程为:\(dp[i]=min(dp[j]+(S[i]−S[j]-1-L)^2)\)。
为方便描述,将 \(L\) 提前加 \(1\),再把 \(min\) 去掉,得到状态转移方程:\(dp[i]=dp[j]+(S[i]−S[j]-L)^2\)。
化简得:\(dp[i]=S[i]^2-2S[i]L+dp[j]+(S[j]+L)^2-2S[i]S[j]\)
1.【代数法】
只含 \(L\) 的项对于每一个 \(i\) 的择优筛选过程都是完全一样的值,只含 \(Function(i)\) 的项在一次 \(i\) 的择优筛选过程中不变,含 \(Function(j)\) 的项始终在发生变化(只要该项是严格单增)。
以此为划分依据,把同类型的项用括号括起来,
即:\(dp[i]=(-2S[i]S[j])+(dp[j]+(S[j]+L)^2)+(S[i]^2-2S[i]L)\)
【维护一个凸包】
设 \(j_1,j_2\) \((0 \leqslant j_1
有:\((-2S[i]S[j_2])+(dp[j_2]+(S[j_2]+L)^2)+(S[i]^2-2S[i]L) \leqslant (-2S[i]S[j_1])+(dp[j_1]+(S[j_1]+L)^2)+(S[i]^2-2S[i]L)\)
即:\((-2S[i]S[j_2])+(dp[j_2]+(S[j_2]+L)^2) \leqslant (-2S[i]S[j_1])+(dp[j_1]+(S[j_1]+L)^2)\)
划重点:此处移项需要遵循的原则是:参变分离。将 \(Function(i)\) 视作未知量,用 \(Function(j)\) 来表示出 \(Function(i)\) 。
移项得:\(-2S[i](S[j_2]-S[j_1]) \leqslant (dp[j_1]+(S[j_1]+L)^2)-(dp[j_2]+(S[j_2]+L)^2)\)
\(\because C[j] \geqslant 1\)
\(\therefore S[j+1] > S[j]\)
\(又 \because j_2 > j_1\)
\(\therefore S[j_2]-S[j_1]>0\)
\(\therefore 2S[i] \geqslant \frac {(dp[j_2]+(S[j_2]+L)^2)-(dp[j_1]+(S[j_1]+L)^2)} {S[j_2]-S[j_1]}\)
设 \(Y(j)=dp[j]+(S[j]+L)^2,X(j)=S[j]\),
即 \(2S[i] \geqslant \frac {Y(j_2)-Y(j_1)} {X(j_2)-X(j_1)}\)
很明显,等式右边是一个关于点 \(P(j_2)\) 和 \(P(j_1)\) 的斜率式,其中 \(P(j)=(X(j),Y(j))=(S[j],dp[j]+(S[j]+L)^2)\)。
也就是说,如果存在两个决策点 \(j_1,j_2\) 满足 \((0 \leqslant j_1
划重点:斜优灵活多变,细节麻烦也多,所以尽量将问题模式化。
比如这里的最终公式,尽量化为 \(\frac {(j)-(j')} {(j)-(j')}\) 的形式,而不是 \(\frac {(j)-(j')} {(j')-(j)}\) ,虽然直接做的话,也不会出什么问题,但这样子可以方便理解,方便判断凸包方向等等。
假设有酱紫的三个点 \(P(j_1),P(j_2),P(j_2)\),\(k_1,k_2\) 为斜率,如下图所示情况:
\(_{(一直在想这个“代数法”是不是应该叫“数形结合”更好呢?算啦,不管啦QAQ)}\)

显然有 \(k_2 < k_1\)。设 \(k_0=2S[i]\),由上述结论可知:
\((a).\) 若 \(k_1 \leqslant k_0\),则 \(j_2\) 优于 \(j_1\) 。反之,若 \(k_1 > k_0\),则 \(j_1\) 优于 \(j_2\) 。
\((b).\) 若 \(k_2 \leqslant k_0\),则 \(j_3\) 优于 \(j_2\) 。反之,若 \(k_2 > k_0\),则 \(j_2\) 优于 \(j_3\) 。
于是这里可以分三种情况来讨论:
\((1).\) \(k_0 < k_2 < k_1\)。由 \((a),(b)\) 可知:\(j_1\) 优于 \(j_2\) 优于 \(j_3\) 。
\((2).\) \(k_2 \leqslant k_0 < k_1\)。由 \((a),(b)\) 可知:\(j_1\) 和 \(j_3\) 均优于 \(j_2\)。
\((3).\) \(k_2 < k_1 \leqslant k_0\)。由 \((a),(b)\) 可知:\(j_3\) 优于 \(j_2\) 优于 \(j_1\) 。
可以发现,对于这三种情况,\(j_2\) 始终不是最优解,于是我们可以将 \(j_2\) 从候选决策点中踢出去(删除),只留下 \(j_1\) 和 \(j_3\),删后的情况如下图所示:

我们要对某一个问题的解决方案进行优化改进,无非就是关注两个要点:正确性和高效性(大多数时候高效性都体现为单调性)。
酱紫做的正确性是毋庸置疑的,因为在 \(j_1\) 和 \(j_3\) 其中必定有一个比 \(j_2\) 更优,所以删除 \(j_2\) 对答案没有任何影响。
那么高效性呢?自己在脑子里面 \(yy\) 一下,在一个坐标系的第一象限(本题中 \(X(j)\) 和 \(Y(j)\)均大于等于 \(0\),至于为什么这里要说等于,下面会提到)中,有若干个离散的点,任取三点,如果左边斜率大于右边斜率,则形成了上述情况,必定会删点,因而消除这种情况。所以将最后留下来的点首位相连的话,其形成的各个线段斜率从左到右必定是单调递增的(有可能非严格递增,这个问题之后再讨论)。
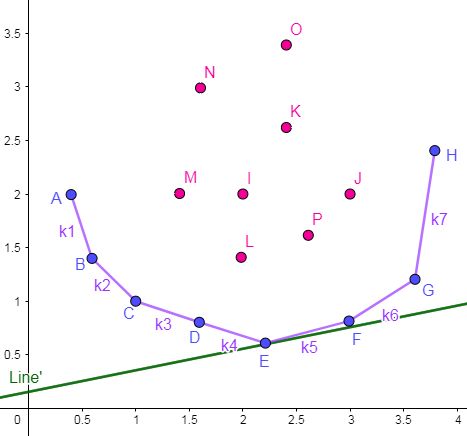
实际上再图中选取最靠左下面,下面,右下面的点首位相连,就是最后留下来的点了,它们形成了一个下凸包,即凸包(又名凸壳)的下半部分(不严谨的讲,给定二维平面上的点集,凸包就是将最外层的点连接起来构成的凸多边形,它能包含点集中所有的点——摘自百度百科)。
维护出的图形如下图所示:

可以尝试在凸包围起来的区域内任意取一点,其必定可以在包围圈上找到两个点使得改点可以被删除,如上 \(L\) 点,它与 \(D,E\) 两点形成了一个可删点图形。
同理,如果把不等式 \(\frac {Y(j_2)-Y(j_1)} {X(j_2)-X(j_1)} \leqslant k_0[i]\) 改为 \(\frac {Y(j_2)-Y(j_1)} {X(j_2)-X(j_1)} \geqslant k_0[i]\),那么维护出来的就是一个上凸包。
【寻找最优决策点】
还是以 玩具装箱 \(toy\) \([P3195]\) 为例,在下凸包点集中总会存在一点,使得它与左邻点形成的斜率小于 \(k_0\) ,与右邻点形成的斜率大于 \(k_0\) 。
例如上图中的 \(E\) 点,设 \(k_4 \leqslant k_0 < k_5\) 由于凸包上面的斜率呈单增态,那么有:\(k_1 < k_2 < k_3 < k_4 \leqslant k_0 < k_5 < k_6 < k_7\),所以决策点 \(E\) 优于其他所有点,即 \(E\) 就是 \(dp[i]\) 的最优决策点。
如果暴力查找的话,就是从第一个点开始向后扫描,找到第一个斜率大于 \(k_0\) 的线段,其左端点即为最优决策点,由于斜率具有单调性,可以二分得到这个点。
2.【线性规划】
强烈推荐用线性规划思想来做题,因为图形的变幻更直观,更直观,更重要的是:在面对一些某某变量不满单调性时,通过图形可以做出判断迅速并改变策略(如使用二分等等),而用代数法的话,很可能会 \(WA\) 上一整天都找不到问题所在。
但是遇到一些复杂的毒瘤 \(dp\) 方程就得靠代数法了(比如有巨毒的国王饮水记 \([NOI2016]\) \([P1721]\))。
【高中数学知识】
先回顾一下 \(dp\) 方程:\(dp[i]=S[i]^2-2S[i]L+dp[j]+(S[j]+L)^2-2S[i]S[j]\)。
对其进行移项变化。划重点:移项要遵循的原则是:把含有 \(function(i)*function(j)\) 的表达式看作斜率 \(k_0\) 乘以未知数 \(x\),含有 \(dp[i]\) 的项必须要在 \(b\) 的表达式中,\(y\) 的表达式中必须含有 \(function(j)\)。如果未知数 \(x\) 的表达式非递增,那么必须要通过等式两边同乘 \(-1\) 的方法使其变为单增的表达式。得到一个形如 \(kx+b=y\) 的表达式。
至于为什么说 \(x\) 的表达式一定要单增,\(Hmm...\) 其实是为了让一些较简单的问题模式化,不易出错,如果你非要单减,可以尝试倒叙枚举,至于是否正确,具体实现需要注意的玄学问题等等,因为觉得太麻烦没有试过,我也不清楚会发生什么。
例如此题,原 \(dp\) 方程可化为:
\((2S[i])S[j]+(dp[i]-S[i]^2+2S[i]L)=(dp[j]+(S[j]+L)^2)\)
其中 \(k_i=2S[i],\) \(x_i=S[j],\) \(b_i=dp[i]-S[i]^2+2S[i]L,\) \(y_i=dp[j]+(S[j]+L)^2\)。
其实也可以化为:
\((2S[i])(S[j]+L)+(dp[i]-S[i]^2)=(dp[j]+(S[j]+L)^2)\)
其中 \(k_i=2S[i],\) \(x_i=S[j]+L,\) \(b_i=dp[i]-S[i]^2,\) \(y_i=dp[j]+(S[j]+L)^2\)。
还可以化为 \(...\)
\(...\)
只要满足上述移项原则,对答案是没有任何影响的。
这里以第一种形式为例,先画出草图:

我们的目的是求出一个最优决策点 \(j\) 使得 \(dp[i]\) 最小,又因为 \(b[i]=dp[i]-S[i]^2\) ,所以就是要找到某个点使这条直线经过它时 \(b\) 最小,即是高中数学上的线性规划问题。
【寻找最优决策点】
如图所示,点 \(E\) 即为最优决策点。显然,这个使得 \(b\) 最小的最优决策点位于下凸包点集中。
三.【维护凸包】
而实际上只要让维护的凸包方向相同,两种思路的代码可以做到一模一样。
用单调队列维护凸包上的点集,操作分三步走:
\((1).\) 进行择优筛选时,在队列中二分找到最优决策点 \(j\) 。
\((2).\) 用最优决策点 \(j\) 更新 \(dp[i]\) 。
\((3).\) 判断当队尾的点与点 \(i\) 形成可删点图形时,出队直至无法再删点,然后将 \(i\) 加入队列。
操作 \((3)\) 有两种判断方法(以下凸包为例),一种是 \(slope(Q[t-1],Q[t]) \geqslant slope(Q[t],i)\),另一种是 \(slope(Q[t-1],Q[t]) \geqslant slope(Q[t-1],i)\),两种写法都表示出现了可以删去点 \(Q[t]\) 的情况。
其中 \(Q\) 是维护凸包点集的队列。
该题时间复杂度为 \(O(nlogn)\),似乎还不太优秀。
四.【再优化】
运用决策单调性。
由于最优决策点递增,可以用单调队列来维护,操作 \((2),(3)\) 不需要改动,操作 \((1)\) 改为:判断当队首的第一根线段斜率小于等于 \(k_0[i]\) 时,出队直至斜率大于 \(k_0[i]\),此时的队首即为最优决策点。
其时间复杂度为 \(O(n)\) 。
五.【再证决策单调性】
一样的,两种思路。
先观察 \(k_0[i]\) 的表达式:\(k_0[i]=2S[i]\) ,很明显 \(k_0\) 呈单增态。
1.【代数法】
\(k_0[i]\) 递增就说明我们找到的第一个斜率大于 \(k_0[i]\) 的线段在不断地向后移,也就是说,如果我们找到了某一个最优决策点 \(j\),那么在下一次决策中,最优决策点 \(j'\) 必定在 \(j\) 的后面。
决策单调性得证。
2.【线性规划】
画出草图:

直线 \(Line_i\) 的斜率 \(k_0[i]\) 递增,
由图可知最优决策点在递增。
决策单调性得证。
六.【Code】
玩具装箱 \(toy\) \([P3195]\)
这道题 \(...\) 太水了 \(...\) 我一开始 \(L\) 忘了加 \(1\) 居然还过了 \(...\)
#include
#include
#define LL long long
#define Re register LL
const int N=5e4+5;
LL i,j,n,L,h=1,t=0,Q[N],S[N],dp[N];
//S[n]=∑C[i]+1, dp[i]=min(dp[j]+(S[i]-(S[j]+L+1))^2),++L
//dp[i]=S[i]^2-2*S[i]*L+dp[j]+(S[j]+L)^2-2S[i]*S[j]
//(2*S[i]) * S[j] + (dp[i]-S[i]^2+2S[i]L)=(dp[j]+(S[j]+L)^2)
// k * x + b = y
inline LL min(Re a,Re b){return a=slope(Q[t-1],i))--t;//至少要有两个元素 h 七.【各种玄学问题】
前方高能预警,画好草图,盯着代码,准备!冲!
\((1).\) 写出 \(dp\) 方程后,要先判断能不能使用斜优,即是否存在 \(function(i)*function(j)\) 的项。
\((2).\) 通过大小于符号或者 \(b\) 中 \(dp[i]\) 的符号结合题目要求 \((min/max)\) 判断是上凸包还是下凸包,否则死活求不出答案。
\((3).\) (单调性出锅 \(1\) 号)将方程变为 \(\frac {Y(j_2)-Y(j_1)} {X(j_2)-X(j_1)} \leqslant k_0[i]\) 或者 \(\frac {Y(j_2)-Y(j_1)} {X(j_2)-X(j_1)} \geqslant k_0[i]\) 或者 \(kx+b=y\) 的形式,变化要遵循之前提到的原则,尤其是 \(X\) 表达式的单调性,结合图形会更好理解。如果 \(X\) 不单调,那么需要用到 \(CDQ\) 分治或者平衡树维护凸包。
\((4).\) (单调性出锅 \(2\) 号)注意是否具有决策单调性,有时候打表只能得到片面的情况。当斜率不是单调递增时该怎么办?由于我们不知道什么时候会在什么地方取得最优决策点,所以必须要保留整个凸包以确保决策有完整的选择空间,查找答案就只能二分了,而不能直接取队首,比如这道题 任务安排 \(3\) \([Loj10186]\) \([BZOJ2726]\)就不满足,其证明放在后面。
\((5).\) (单调性出锅 \(3\) 号)当 \(X\) 非严格递增时,那么在求斜率时可能会出现 \(X(j_1)==X(j_2)\) 的情况,最好是写成这样的形式:\(return Y(j) \geqslant Y(i)?inf:-inf\),而不要直接 \(return\) \(inf\) 或者 \(-inf\),在某些题中情况较复杂,如果不小心画错了图,返回了一个错误的极值就完了,而且这种错误只用简单数据还很难查出来。
\((6).\) 注意比较 \(k_0[i]\) 和 \(slope(j_1,j_2)\) 要写规范,要用右边的点减去左边的点进行计算,如果用的代数法理解,写出了 \((X(j_2)-X(j_1))*k_0 \leqslant Y(j_2)-Y(j_1)\) 或 \((X(j_2)-X(j_1))*k_0 \geqslant Y(j_2)-Y(j_1)\),而恰巧 \(j_1,j_2\) 又写反了,会出现等式两边同除了负数却没变号的情况。当然也可以用 \(k_0\) 和 \(\frac {Y(j_2)-Y(j_1)}{X(j_2)-X(j_1)}\) 比较就不会出现这种问题 。
\((7).\) 队列初始化要塞入一个点 \(P(0)\),还是以 玩具装箱 \(toy\) \([P3195]\) 为例,塞入 \(P(S[0],dp[0]+(S[0]+L)^2)\) 即 \(P(0,0)\),其代表的决策点为 \(0\)。
\((8).\) 手写队列得初始化是 \(h=1,t=0\),由于塞了初始点导致 \(t\) 加 \(1\),所以在一些题解中可以看到 \(h=t=1\) 甚至是 \(h=t=0,\) \(h=t=2\) 的写法,都是等价的。
\((9).\) 手写队列判断是否为空是 \(\{h \leqslant t\}\),而出入队判断时都需要有至少 \(2\) 两个元素才能进行操作。所以应是 \(\{h
\((10).\) 计算斜率可能会因为向下取整而出现误差,所以 \(slope\) 函数最好设为 \(long\) \(double\) 类型(据说范围有 \(1.2*10^{4932}\) 辣么大)。
\((11).\) 有可能会有一部分的 \(dp\) 初始值无法转移过来,需要手动提前弄一下,例如 摆渡车 \([P5017]\)
\((12).\) 在比较两个斜率时,尽量写上等于,即 \(“\leqslant” , “\geqslant”\) 而不是 \(“<”,“>”\)。这样写对于去重有奇效(有重点时会导致斜率分母出锅),但不要以为这样就可以完全去重,因为要考虑的情况非常复杂,所以还是应该加上 \((5)\) 中提到的特判,万无一失。
八.【补充内容】
(4). (单调性出锅 \(2\) 号)
任务安排 \(1\) \([Loj10184]\) \([P2365]\)
任务安排 \(2\) \([LO10185]\) [\(Poj1180\)]
任务安排 \(3\) \([Loj10186]\) \([Bzoj2726]\)
【题目描述】
有 \(N\) 个任务等待完成(顺序不得改变),这 \(N\) 个任务被分成若干批,每批包含相邻的若干任务。从时刻 \(0\) 开始,这些任务被分批加工,第 \(i\) 个任务单独完成所需的时间是 \(T_i\) 。只有一台机器,在每批任务开始前,机器需要启动时间 \(S\),完成这批任务所需的时间是各个任务需要时间的总和(同一批任务将在同一时刻完成)。每个任务的费用是它的完成时刻乘以它的费用系数 \(F_i\)。请确定一个分组方案,使得总费用最小。
例如:\(N=5,\) \(S=1,\) \(T=\{1,3,4,2,1\},\) \(F=\{3,2,3,3,4\}\)。如果分组方案是 \(\{1,2\},\{3\},\{4,5\}\),则五个任务的完成时间分别为 \(\{5,5,10,14,14\}\),费用分别为 \(C=\{15,10,30,42,56\}\),总费用为 \(153\) 。
相关数据:
\(T1:\) \(1 \leqslant N \leqslant 5000, 0 \leqslant S \leqslant 50,1 \leqslant T_i, F_i \leqslant 100\)
\(T2:\) \(1 \leqslant N \leqslant 10000, 0 \leqslant S \leqslant 50,1 \leqslant T_i, F_i \leqslant 100\)
\(T3:\) \(0 \leqslant S,F_i \leqslant 512,|T_i| \leqslant 512\)
【T1】
设 \(ST[i]=\sum_{k=1}^i T[i],SF[i]=\sum_{k=1}^i F[i]\)
\(dp\) 方程很简单:\(dp[p][i]=min(dp[p-1][j]+(ST[i]+p*S)(SF[i]-SF[j]))\),但是 \(O(n^3)\) 的时间复杂度连 \(T1\) 都过不了。
由于不知道每一次分段之前已经分了多少,所以需要用一维空间和一层循环来表示这个信息,从而知道 \(S\) 需要乘以多少。
那么可以反过来,用一种名为费用提前计算的经典思想来进行优化,每分出一批任务,那么对于这之后的每一个任务都需要多出一个 \(S\) 的时间,所以可以直接计算 \(S\) 对后面的影响。
即:\(dp[i]=min(dp[j]+ST[i](SF[i]-SF[j])+S(SF[n]-SF[j]))\)
压成了 \(O(n^2)\) 后,\(T1\) 就可以 \(AC\) 了,但它还可以继续优化。
【T2】
先转化为斜率式看看?
\((S+ST[i]) * SF[j] + (dp[i]-ST[i]*SF[i]-S*SF[i]) = (dp[j])\)
其中 \(k=S+ST[i],\) \(x=SF[j],\) \(b=dp[i]-ST[i]*SF[i]-S*SF[i],\) \(y=dp[j]\) 。
决策点要使得 \(dp[i]\) 尽量小,\(S+ST[i]\) 和 \(SF[j]\) 都严格单增
所以维护一个下凸包即可。
时间复杂度为 \(O(n)\) 。
【Code】
#include
#include
#define LL long long
#define Re register LL
const int N=1e4+5;
LL i,j,n,h=1,t=0,S,Q[N],ST[N],SF[N],dp[N];
//dp[p][i]=min(dp[p-1][j]+(ST[i]+S*p)*(SF[i]-SF[j]));
//dp[i]=dp[j]+ST[i]*(SF[i]-SF[j])+S*(SF[n]-SF[j]);
//(S+ST[i]) * SF[j] + (dp[i]-ST[i]*SF[i]-S*SF[i]) = (dp[j])
// k * x + b = y
inline LL min(Re a,Re b){return aslope(Q[t-1],i))--t;
Q[++t]=i;
}
printf("%lld",dp[n]);
} 【T3】
因 \(F_i\) 可等于 \(0\),\(X(\) 即 \(SF[i])\) 非严格递增,所以需要特判 \(X(i)==X(j)\) 的情况。
因 \(T_i\) 可小于 \(0\),\(k_0[i](\) 即 \(S+ST[i])\) 无单调性,所以不具有决策单调性,其证明如下:
该 \(dp\) 方程显然为 \(dp[i]=dp[j]+w(i,j)\) 的形式,其中 \(w(i,j)=ST[i](SF[i]-SF[j])+S(SF[n]-SF[j])\) 。
\(证明:设\) \(Q=S(SF[n]-SF[j])\)
\(\therefore w(i,j)=ST[i](SF[i]-SF[j])+Q\)
\(\begin{equation*} \begin{split} \therefore w(i+1,j+1)=&ST[i+1]SF[i+1]-ST[i+1]SF[j+1]+S(SF[n]-SF[j+1])\\ =&ST[i+1]SF[i+1]-SF[j+1]*(ST[i]+T[i+1])+Q-S*F[j+1]\\ \end{split} \end{equation*}\)
\(\begin{equation*} \begin{split} w(i,j+1)=&ST[i](SF[i]-SF[j+1])+Q-S*F[j+1]\\ =&ST[i]SF[i]-ST[i]SF[j+1]+Q-S*F[j+1]\\ \end{split} \end{equation*}\)
\(\begin{equation*} \begin{split} w(i+1,j)=&ST[i+1](SF[i+1]-SF[j])+Q\\ =&ST[i+1]SF[i+1]-ST[i+1]SF[j]+Q\\ =&ST[i+1]SF[i+1]-ST[i]SF[j]-T[i+1]SF[j]+Q \end{split} \end{equation*}\)
\(\therefore w(i,j)+w(i+1,j+1)=ST[i](SF[i]-SF[j])+ST[i+1]SF[i+1]-SF[j+1](ST[i]+T[i+1])+2Q-S*F[j+1]\)
\(\therefore w(i+1,j)+w(i,j+1)=ST[i]SF[i]-ST[i]SF[j+1]+ST[i+1]SF[i+1]-ST[i]SF[j]-T[i+1]SF[j]+2Q-S*F[j+1]\)
\(\therefore w(i,j)+w(i+1,j+1)-w(i+1,j)+w(i,j+1)=-F[j+1]*T[i+1]\)
\(又 \because 0 \leqslant F_i \leqslant 512,-512 \leqslant T_i \leqslant 512\)
\(\therefore 当 T_i \leqslant 0 时,w(i,j)+w(i+1,j+1) \geqslant w(i+1,j)+w(i,j+1)\)
\(当 T_i \geqslant 0 时,w(i,j)+w(i+1,j+1) \leqslant w(i+1,j)+w(i,j+1)\)
四边形不等式不一定成立,所以次题不具有决策单调性。
但并不是说斜优就没法用了,只需在队列中二分最优决策点即可。
时间复杂度为 \(O(nlogn)\) 。
【Code】
#include
#include
#define LL long long
#define Re register LL
const int N=3e5+5;
LL i,j,n,h=1,t=0,S,Q[N],ST[N],SF[N],dp[N];
//dp[p][i]=min(dp[p-1][j]+(ST[i]+S*p)*(SF[i]-SF[j]));
//dp[i]=dp[j]+ST[i]*(SF[i]-SF[j])+S*(SF[n]-SF[j]);
//(S+ST[i]) * SF[j] + (dp[i]-ST[i]*SF[i]-S*SF[i]) = (dp[j])
// k * x + b = y
//ti可小于0,所以ST[i]非递增,只可二分
//fi可等于0,所以SF[i](X)非严格递增,因此需要特判X(i)==X(j)的情况
inline LL min(Re a,Re b){return a=Y(i)?1e18:-1e18):(long double)(Y(j)-Y(i))/(X(j)-X(i));
}//由于需要二分查找,多了一些限制:队列里不能有在同一位置的点,返回inf还是-inf都影响着是否删除重点,平时不可不管,二分必须注意返回值
inline LL sakura(Re k){
if(h==t)return Q[h];
Re l=h,r=t;
while(l>1,i=Q[mid],j=Q[mid+1];
if(slope(i,j)Q[mid]s即j>i即SF[j]>SF[i]即X(j)>X(i),如果是(i)-(j)的话乘过去要变号
else r=mid;
}
return Q[l];
}
int main(){
scanf("%lld%lld",&n,&S);
for(i=1;i<=n;ST[i]+=ST[i-1],SF[i]+=SF[i-1],++i)scanf("%lld%lld",&ST[i],&SF[i]);
Q[++t]=0;
for(i=1;i<=n;++i){
j=sakura(S+ST[i]);
dp[i]=dp[j]+ST[i]*(SF[i]-SF[j])+S*(SF[n]-SF[j]);
while(h=slope(Q[t-1],i))--t;//此处取等号作用出现,如果不取等,会WA第12个点
Q[++t]=i;
}
printf("%lld",dp[n]);
} (11). 预处理 DP 初始值
摆渡车 \([P5017]\)
这是去年 \(noip\) 普及组的题(雾)。
【Code】
#include
#define Re register int
const int N=4e6+105;
int i,j,n,m,h=1,t=0,T,ti,ans=2e9,G[N],S[N],Q[N],dp[N];
inline int min(Re a,Re b){return aY(i)?2e9:-2e9):(long double)(Y(j)-Y(i))/(long double)(X(j)-X(i));}
int main(){
scanf("%d%d",&n,&m);
for(i=1;i<=n;T=-min(-T,-ti),++G[ti],S[ti]+=ti,++i)scanf("%d",&ti);
for(i=1;i=slope(Q[t-1],i-m+1))--t;
Q[++t]=i-m+1;//(j+1)+m<=i
}
for(i=T;i 九.【题外话】
斜优实在是恐怖,光是单调性出锅所引发的一系列问题就搞得我差点原地爆炸。
但不得不说,斜优大大提升了我推 \(dp\) 方程和数学证明的能力。。。
斜优 \(NB\) \(!\)
(最近斜优的题写了有七八道,而且每写一道就会踩上一个雷(TAT),所以感悟会这么多,篇幅大也是理所当然的啦QAQ)
十.【例题】
【简单题】
- 玩具装箱 \(toy\) \([P3195]\)
摆渡车 \([P5017]\)
土地征用 \(Land\) \(Acquisition\) \([P2900]\)
征途 \(P4072\)
【高档题】
购票 \([P2305]\)
国王饮水记 \([P1721]\)
【参考文献】
(本文部分内容摘自以下文章)
凸包—百度百科
\(dp\) 的各种优化
斜率优化学习笔记
斜率优化及其变形
斜率优化\(dp\)及总结
题解 \(P3195\)—\(xyz32768\)