手写机器学习算法系列06——DBSCAN
引言
我们在上一节手写机器学习算法系列05——k-means介绍了K-means聚类算法和其python实现。但是世界上没有完美的算法,k-means也存在着诸如不适用于非凸样本,超参数簇聚数目不好指定且对结果影响极大等缺点,例如:
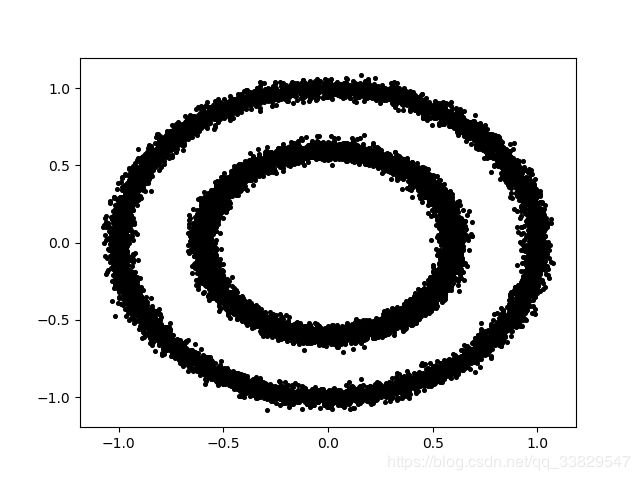
这个样本集我们可以看出有2个簇聚,分别是外面的圆和内部的圆,但是使用k-means来进行聚类,得出的效果可能是这样:
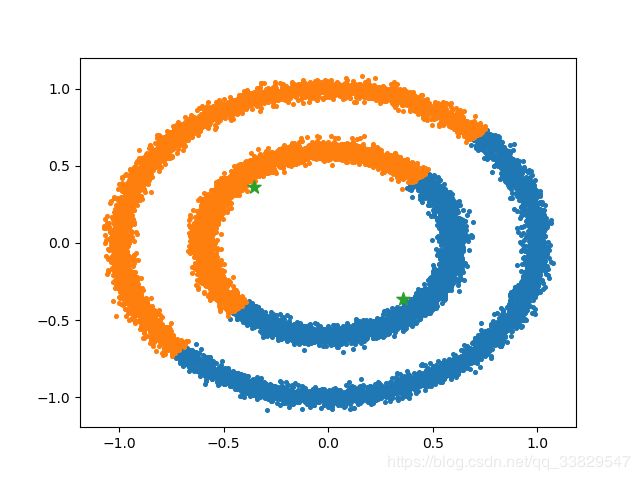
这就不符合我们预期的结果。至于超参数簇聚数目难以指定就更好理解了,千万级别的样本集根本就不知道应该会有几个簇,只能玄学调参慢慢试。
针对k-means的上述缺点,今天带来另一种聚类算法,基于密度的聚类算法——DBSCAN。
DBSCAN算法原理
首先我们要明确几个概念:
-
ϵ \epsilon ϵ-邻域:以某个样本点为圆心,以 ϵ \epsilon ϵ为半径画圆,圆的区域就叫这个样本点的 ϵ \epsilon ϵ-领域
-
核心对象:如果某个样本点的 ϵ \epsilon ϵ-邻域存在至少min_pts个样本点,那么这个样本点被称为核心对象。
-
直接密度可达:如果样本点p是核心对象,且样本点q存在于样本点p的 ϵ \epsilon ϵ-邻域内,那么我们说样本点p到样本点q是直接密度可达的。直接密度可达关系不具有对称性,也不具有传递性。
-
密度可达:如果有样本点 p 1 、 p 2 、 p 3 . . . p n p_1、p_2、p_3 \space ... \space p_n p1、p2、p3 ... pn,满足 p i − 1 p_{i-1} pi−1到 p i p_{i} pi是直接密度可达的,那么我们说 p 1 p_1 p1到 p n p_n pn是密度可达的。密度可达具有传递性,但不具有对称性。
-
密度相连:如果从核心点 p p p出发到 q 1 q_1 q1和 q 2 q_2 q2都是密度可达的,那么我们说 q 1 q_1 q1和 q 2 q_2 q2是密度相连的。密度相连具有对称性,也具有传递性。
-
簇聚:如果样本点 p 1 、 p 2 、 p 3 . . . p n p_1、p_2、p_3 \space ... \space p_n p1、p2、p3 ... pn之间互相都是密度相连的,那么我们说这些样本点属于同一个簇聚。
-
边缘对象:如果样本点 p p p属于某一个簇聚,但不属于核心对象,则称边缘对象。
-
噪声点:如果从任何一样本点出发到样本点 p p p,都不是密度可达,那么我们说 p p p是噪声点,或者叫离群点。
如下图所示:
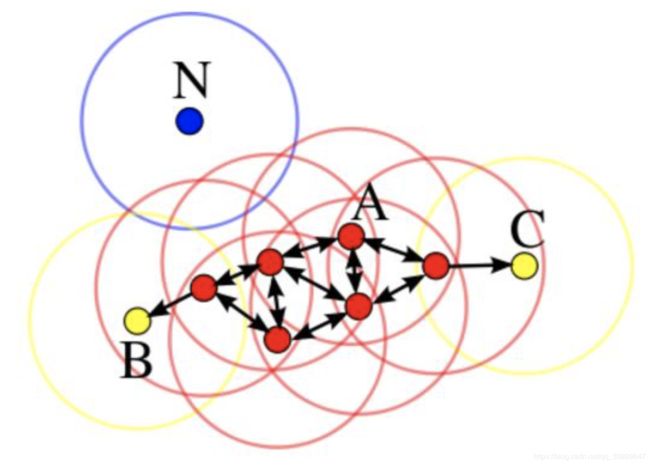
上图设定的min_pts为3,红色的点是核心对象;黄色的点是边缘对象;箭头代表了直接密度可达关系;红色和黄色的点集两两满足密度相连关系,即属于同一个簇;蓝色的点是噪声点。
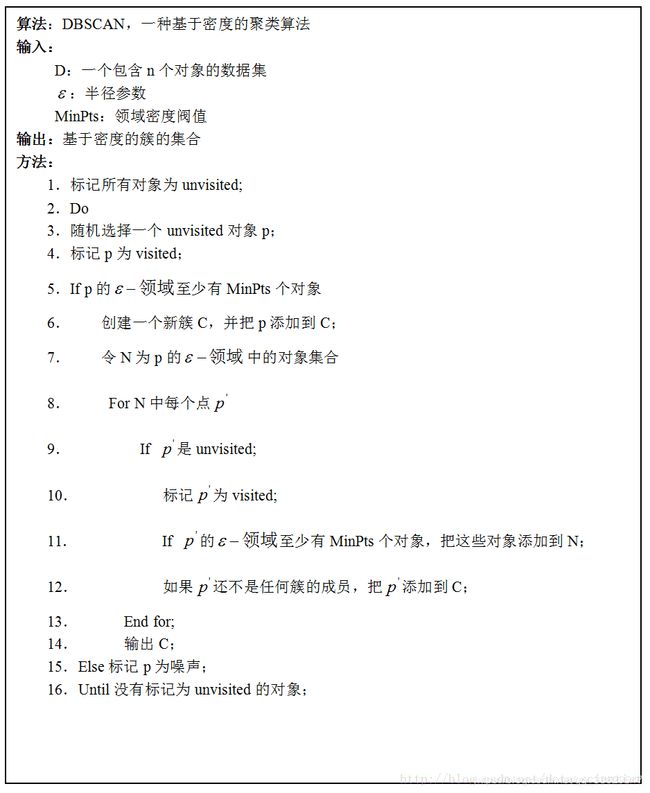
DBSCAN聚类算法就是通过输入样本集D、邻域半径- ϵ \epsilon ϵ和密度阈值min_pts,将相互之间密度相连的样本点聚成簇。算法伪代码如下:
手写DBSCAN算法
样本点存在是否访问的状态量,因此我们构建一个Point对象,包含访问状态和样本点数据两个属性:
class Point:
def __init__(self,data):
self.visited = False
self.data = data
然后实现DBSCAN聚类的核心算法:
import numpy as np
from point import Point
class DBSCANCluster:
def __init__(self,ndarray,epsilon,min_pts):
self.epsilon = epsilon # 邻域半径
self.min_pts = min_pts # 密度阈值
self.datas = [] # 样本集
for item in ndarray:
self.datas.append(Point(item)) # 将ndarray装配到Point对象中然后放入list
def cluster(self):
''' 聚类
'''
result=[] # 簇聚结果
noise =[] # 噪声点集
while True:
P = self.__pick() # 选取一个未被访问的对象
if P == None: # 如果没有未访问的样本点
return result,noise # 返回结果
# 获得P点邻域的所以对象数量和未被访问的对象list
num,N = self.__pts_scan(P)
if num >= self.min_pts: # 如果是核心对象(邻域样本数大于密度阈值)
new_cluster=[] # 构建一个新簇
new_cluster.append(P.data) # 将P点加入新簇
for p in N: # 遍历核心对象P邻域内的样本集
new_cluster.append(p.data) # 样本加入新簇
num,pts = self.__pts_scan(p) # 获得样本的邻域点数和未被访问的对象list
if num >= self.min_pts: # 如果样本是核心对象
N += pts # 则将其邻域内的未访问样本加入迭代样本集
result.append(new_cluster) # 迭代终止后将新簇加入簇聚结果
else: # 如果P不是核心对象
noise.append(P.data) # 加入噪声点集
def __pick(self):
''' 选择一个未被访问的样本点
'''
for index in range(len(self.datas)):
if self.datas[index].visited == False:
self.datas[index].visited = True
return self.datas[index]
return None
def __pts_scan(self,pts):
''' 扫描某样本点epsilon-邻域内的所有点
'''
result = []
num = 0
for index in range(len(self.datas)):
if self.__distance(pts.data,self.datas[index].data) <= self.epsilon:
num += 1
if self.datas[index].visited == False:
self.datas[index].visited = True
result.append(self.datas[index])
return num,result
def __distance(self,p1,p2):
'''计算两点间距
'''
tmp=0
for i in range(len(p1)):
tmp += pow(p1[i]-p2[i],2)
return pow(tmp,0.5)
算法测试
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
from dbscan import DBSCANCluster
from sklearn.datasets import make_circles # 数据集就直接导入sklearn中的
if __name__ == "__main__":
datas, label= make_circles(n_samples=15000, shuffle=True, noise=0.03, random_state=None, factor=0.6)
plt.scatter(datas[:,0],datas[:,1],c="black",s=7)
plt.savefig('circles.png') # 保存样本集的散点图
plt.clf()
cluster =DBSCANCluster(datas,0.1,3)
result,noise=cluster.cluster()
for item in result:
plt.scatter([x[0] for x in item],[x[1] for x in item],s=7)
for item in noise:
plt.scatter(item[0],item[1],s=7,c="black")
plt.savefig('result_circles.png') # 保存聚类结果
输出结果:
样本集散点图

聚类结果图

总结
测试代码的运行结果符合我们的预期,但是运行时间耗费了很久,这是因为DBSCAN的时间复杂度高达 O ( N 2 ) O(N^2) O(N2)。也可以使用K-D-Tree来优化数据结果,使时间复杂度降低到 O ( N log ( N ) ) O(N\log(N)) O(Nlog(N))。先留个坑,以后有时间实现了再另外开篇文章。