本文将详细的介绍单纯形算法,包括但不限于
- LP问题
- 单纯形算法原理
- 无界、无解、循环等情况
- python代码实现
线性规划问题
首先引入如下的问题:
假设食物的各种营养成分、价格如下表:
| Food | Energy(能量) | Protein(蛋白质) | Calcium(钙) | Price |
|---|---|---|---|---|
| Oatmeal(燕麦) | 110 | 4 | 2 | 3 |
| Whole milk(全奶) | 160 | 8 | 285 | 9 |
| Cherry pie(草莓派) | 420 | 4 | 22 | 20 |
| Pork with beans(猪肉) | 260 | 14 | 80 | 19 |
要求我们买的食物中,至少要有2000的能量,55的蛋白质,800的钙,怎样买最省钱?
设买燕麦、全奶、草莓派、猪肉1,x2,x3,x
于是我们可以写出如下的不等式组
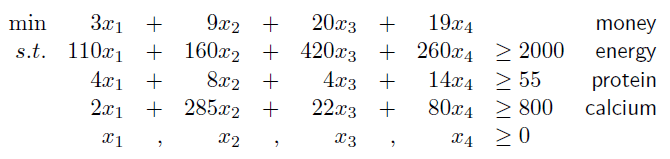
其实这些不等式组就是线性规划方程(Linear programming formulation):
简单的说,线性规划就是在给定限制的情况下,求解目标。
可行域
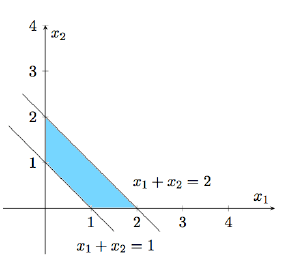
来看一个算法导论中的例子,考虑如下的线性规划:
我们可以画出下面的图:
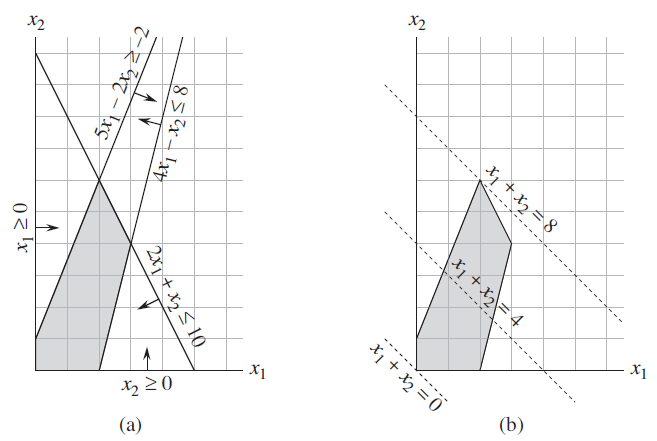
1,x2所在的区域,而我们最后的解x1,x2也要在这里面。我们把这个区域称为可行域(feasible region)
1= 2 , x2=6
线性规划标准形式
线性规划的标准形式如下:
就是
- 求的是min(算法导论的是max,本文为min)
- 所有的约束为<=的形式
- 所有的变量均 >=0
如何变为标准形式?
- 原来是max, 直接*-1求min
- 若原来约束为=,转为 >= 和<=
- 约束原来为 >= 同样的*-1,就改变了<=
- 若有变量 xi < 0 ,那么用 x‘ – x”来替代,其中 x’>=0 x”>=0
线性规划松弛形式
松弛形式为:
就是通过引入变量把原来的 <= ,变为=的松弛形式.
如:
写为松弛形式就是
<= vs <
有砸场子的同学会问(╯‵□′)╯︵┻━┻,为什么我们的线性规划的形式都是可以 <= 或者 >=的形式的?把等号去掉可以么?
就是不可以( ̄ε(# ̄)
举个例子
显然第二个是无解的。
单纯形算法的思想与例子
如何求解线性规划问题呢?
有一些工具如GLPK,Gurobi 等,不在本文的介绍范围内。
本文要介绍的是单纯形算法,它是求解线性规划的经典方法,虽然它的执行时间在最坏的情况下是非多项式的(指数时间复杂度),但是,在绝大部分情况下或者说实际运行过程中却是多项式时间。
它主要就三个步骤
- 找到一个初始的基本可行解
- 不断的进行旋转(pivot)操作
- 重复2直到结果不能改进为止
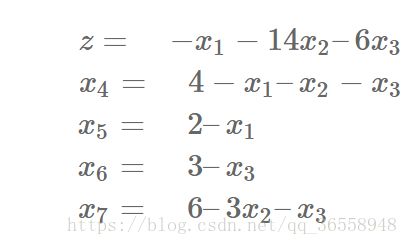
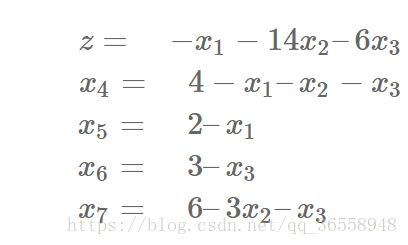
以下面的线性规划为例:
将其写为松弛的形式:
其实,就是等价于(仍然要求1,x2,x3,x4,x5,x6,x7 >=0):
在上述的等式的左边称为基本变量,而右边称为非基本变量。
现在来考虑基本解就是把等式右边的所有非基本变量设为0,然后计算左边基本变量的值。
这里,容易得到基本解为:(x1,x2….x7) = (0,0,0,4,2,3,6),而目标值z = 0,其实就是把基本变量xi设置为bi。
一般而言,基本解是可行的,我们称其为基本可行解。初始的基本解不可行的情况见后面的讨论,这里假设初始的基本解就是基本可行解,因此三个步骤中第一步完成了。
现在开始,来讨论上面的第二个步骤,就是旋转的操作。
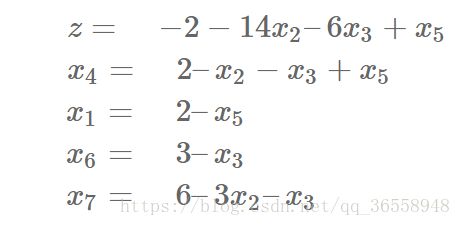
我们每次选择一个在目标函数中的系数为负的非基本变量xe,然后尽可能的增加xe而不违反约束,并将xe用基本变量xl表示, 然后把xe变为基本变量,xl变为非基本变量。
1,那么在上述的等式(不包括目标函数z那行)中,第1个等式限制了x1 <=4(因为x4>=0),第2个等式有最严格的限制,它限制了x1 <=2,因此我们最多只能将x1增加到2,根据上面的第二个等式,我们有: x1 = 2 – x5,带入上面的等式就实现了xe和xl的替换:
这样其实就是一个转动(pivot)的过程,一次转动选取一个非基本变量(也叫替入变量)xe 和一个基本变量(也叫替出变量) xl ,然后替换二者的角色。执行一次转动的过程与之前所描述的线性规划是等价的。
同样的,将非基本变量设为0,于是得到:(x1,x2….x7) = (2,0,0,2,0,3,6), Z = -2,说明我们的目标减少到了-2
接下来是单纯形算法的第三步,就是不断的进行转动,直到无法进行改进为止,继续看看刚才的例子:
我们接着再执行一次转动,这次我们可以选择增大x2或者x3,而不能选择x5,因为增大x5之后,z也增大,而我们要求的是最小化z。假设选择了x2,那么第1个等式限制了x2 <=2 , 第4个等式限制了x2 <= 2,假设我们选择x4为替出变量,于是有: x2 = 2 – x3 – x4 + x5 ,带入得:
此时,我们的基本解变为(x1,x2….x7) = (2,2,0,0,0,3,0), Z = -30
我们可以继续的选择增大x5,第4个等式具有最严格的限制(0 – 3x5 >=0),我们有5 = 2/3 x3 + x4 – 1/3 x
带入得
此时,我们的基本解变为(x1,x2….x7) = (2,2,0,0,0,3,0), Z = -30,这时候并没有增加,但是下一步,我们可以选择增加 x3。第2个和第3个有最严格的限制,我们选第2个的话,得:3 = 3 – 3/2 x1 – 3/2 x4 + 1/2 x,然后老样子,继续带入:
1,x2….x7) = (0,1,3,0,2,0,0),看看最开始的目标函数:z = -x1 -14x2 – 6x3 ,我们将x2=1,x3=3带入得,z=-32,说明我们经过一系列的旋转,最后得到了目标值。
退化(Degeneracy)
在旋转的过程中,可能会存在保持目标值不变的情况,这种现象称为退化。比如上面的例子中,两次等于-30.
循环(cycling)的情况,这是使得单纯形算法不会终止的唯一原因。还好上面的例子中,我们没有产生循环的情况,再次旋转,目标值继续降低。
《算法导论》是这样介绍退化产生循环的:
Degeneracy can prevent the simplex algorithm from terminating, because it can lead to a phenomenon known as cycling: the slack forms at two different iterations of SIMPLEX are identical. Because of degeneracy, SIMPLEX could choose a sequence of pivot operations that leave the objective value unchanged but repeat a slack form within the sequence. Since SIMPLEX is a deterministic algorithm, if it cycles, then it will cycle through the same series of slack forms forever, never terminating.
如何避免退化?Bland规则:
在选择替入变量和替出变量的时候,我们总是选择满足条件的下标最小值。
- 替入变量xe:目标条件中,系数为负数的第一个作为替入变量
- 替出变量xl:对所有的约束条件中,选择对xe约束最紧的第一个
在上面的例子中,我也是这么做的。^ ^
另一个方法是加入随机扰动。
无界(unbounded)的情况
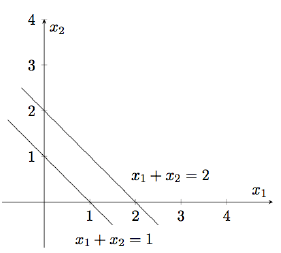
有的线性规划问题是无界的,举个栗子

对于下面的线性规划
画出区域为:
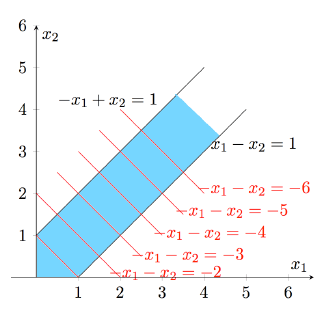
显然可以不断的增大。让我们来看看单纯形算法是如何应对的:
上述的写成松弛形式为:
也就是,
1 为替入变量,x3为替出变量,有:
这时候我们只能选择x2 为替入变量,才能使得目标值变小,但是我们发现,对于x2没有任何的约束,也就是说,x2可以无限大,所以这是没有边界的情况。
这个情况是我们有一个替入变量,但是找不到一个替出变量导致的,这时候就是无界的情况了,写算法的时候注意判断一下即可。
单纯形算法的具体实现
说了那么多,代码怎么写呢?
看一下最开始的线性规划的问题(已经是松弛形式):

我们可以得到下面的矩阵:

- 矩阵A:就是约束条件的系数(等号左边的系数)
- 矩阵B:就是约束条件的值(等号右边)
- 矩阵C:目标函数的系数值
我们将其拼接起来:
左下角为B,右上角为C,右下角为A,那么左上角呢?我们放的是-z,初始时-z = 0!
将上面那个矩阵和写成 基本变量 = 非基本变量的形式对比:

我们发现,对于B、C就是一样的,而A取决于基本变量和非基本变量,非基本变量符号相反,基本变量符号相同。
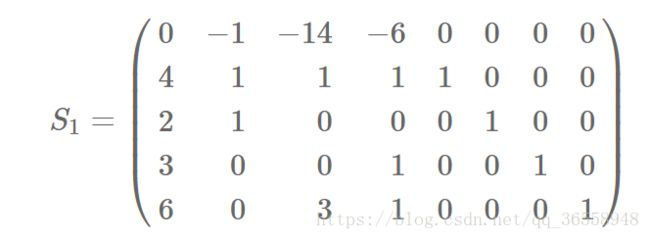
接着以最开始的线性规划求解过程的第二步为例,来看看我们的矩阵是如何进行运算的,第二步我们的结果如下(我们选择了x1为替入变量,x5为替出变量):
1 = 2 – x5 我们改写成: 2 = x1 + x5 , 因此这行矩阵就是: (b,a1,a2…..a7) = (2,1,0,0,0,1,0,0),其它的类推,注意-z,因此我们的矩阵应该是如下形式的:
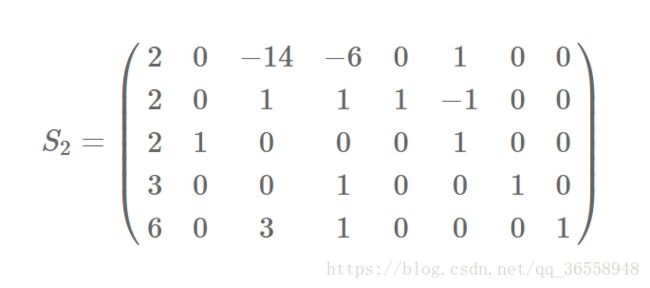
OK,那么S1 如何变成S2的?
首先是第2行,我们是将 x1用x5表示(x1= x5 ),在等式的变换中,就是移项,然后每一个都除以x1的系数。其实用矩阵很简单,这里就是mat[2] /= mat[2][1] ,表示矩阵第二行都除以第二行第一个元素
其它行呢?只要有x1的,我们都用1 = 2 – x5 来表示,就是其它行的x1的系数 * mat[2],然后相减,mat[i]= mat[i] – mat[2] * mat[i][1] ,这样就实现了约束条件中替入和替出变量的替换!比如第一行,就是mat[1] = mat[1] – mat[2] * 1变成两行直接相减
现在来看目标函数,对于目标函数,我们也是将x1用 2 – x5来表示,参照上面的思路,同样的减法:mat[0] = mat[0] – mat[2] * -1 = mat[0] + mat[2] 。注意到我们的其实我们的z = -2,而左上角的为 2,也就是-z,这就是我们为啥说左上角是-z的原因。
用矩阵的形式来表示后,可以写出simplex beta0.99代码(去除版权信息、空行等,只需要21行!):
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
|
# -*- coding: utf-8 -*-
# @Date : 2016/11/17
# @Author : hrwhisper
import
numpy
as
np
class
Simplex
(
object
)
:
def
__init__
(
self
,
obj
,
max_mode
=
False
)
:
self
.
max_mode
=
max_mode
# default is solve min LP, if want to solve max lp,should * -1
self
.
mat
=
np
.
array
(
[
[
0
]
+
obj
]
)
*
(
-
1
if
max_mode
else
1
)
def
add_constraint
(
self
,
a
,
b
)
:
self
.
mat
=
np
.
vstack
(
[
self
.
mat
,
[
b
]
+
a
]
)
def
solve
(
self
)
:
m
,
n
=
self
.
mat
.
shape
# m - 1 is the number slack variables we should add
temp
,
B
=
np
.
vstack
(
[
np
.
zeros
(
(
1
,
m
-
1
)
)
,
np
.
eye
(
m
-
1
)
]
)
,
list
(
range
(
n
-
1
,
n
+
m
-
1
)
)
# add diagonal array
mat
=
self
.
mat
=
np
.
hstack
(
[
self
.
mat
,
temp
]
)
# combine them!
while
mat
[
0
,
1
:
]
.
min
(
)
<
0
:
col
=
np
.
where
(
mat
[
0
,
1
:
]
<
0
)
[
0
]
[
0
]
+
1
# use Bland's method to avoid degeneracy. use mat[0].argmin() ok?
row
=
np
.
array
(
[
mat
[
i
]
[
0
]
/
mat
[
i
]
[
col
]
if
mat
[
i
]
[
col
]
>
0
else
0x7fffffff
for
i
in
range
(
1
,
mat
.
shape
[
0
]
)
]
)
.
argmin
(
)
+
1
# find the theta index
if
mat
[
row
]
[
col
]
<=
0
:
return
None
# the theta is ∞, the problem is unbounded
mat
[
row
]
/=
mat
[
row
]
[
col
]
ids
=
np
.
arange
(
mat
.
shape
[
0
]
)
!=
row
mat
[
ids
]
-=
mat
[
row
]
*
mat
[
ids
,
col
:
col
+
1
]
# for each i!= row do: mat[i]= mat[i] - mat[row] * mat[i][col]
B
[
row
]
=
col
return
mat
[
0
]
[
0
]
*
(
1
if
self
.
max_mode
else
-
1
)
,
{
B
[
i
]
:
mat
[
i
,
0
]
for
i
in
range
(
1
,
m
)
if
B
[
i
]
<
n
}
|
一个调用的例子:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
|
"""
minimize -x1 - 14x2 - 6x3
st
x1 + x2 + x3 <=4
x1 <= 2
x3 <= 3
3x2 + x3 <= 6
x1 ,x2 ,x3 >= 0
answer :-32
"""
t
=
Simplex
(
[
-
1
,
-
14
,
-
6
]
)
t
.
add_constraint
(
[
1
,
1
,
1
]
,
4
)
t
.
add_constraint
(
[
1
,
0
,
0
]
,
2
)
t
.
add_constraint
(
[
0
,
0
,
1
]
,
3
)
t
.
add_constraint
(
[
0
,
3
,
1
]
,
6
)
print
(
t
.
solve
(
)
)
print
(
t
.
mat
)
|
首先初始化目标函数,然后不断的使用add_constraint添加约束条件。
注意在上面的Simplex类中,我们在初始化中加入了参数max_mode,处理最大值的情况。
然后在16~18行中,我们初始化了最开始的基本变量为B, 需要松弛的变量有m-1个,合并(m-1) *( m-1)的一个对角阵和一行有m-1个0的数组(这是目标函数),然后将他们和原来的合并起来,这样就构成了我们的S矩阵。
19行判断是否还有元素可以继续被增大(就是系数为负)
20-22行选择合适的替入和替出变量,若无替出变量,说明原问题无界,我们在23行处理了这种情况。
24~27就是旋转的过程,进行矩阵的行变换。并用B数组记录替入的替入变量。
28行我们返回目标值z,若为最小值,则要*-1,最大值则不用(因为一开始已经*-1了)。然后最后对应x的解就是基本变量为对应的bi,非基本变量为0,注意删除我们松弛添加的变量(所以只要判断下标是否 < n)
simplex 0.99 beta 就是这么少的代码这么容易的就实现了!
来,跟我一起喊:python 大法好!
初始解 ≠ 基本可行解以及无解的情况
在你高呼python大法好的时候,!
但是我把它称为beta 0.99版本肯定是有原因的,绝大多数情况下,初始解就是基本可行解,但是也有例外啊!
而且还有无解的情况。(╯‵□′)╯︵┻━┻
栗子
栗子1
栗子1登场:
首先转化为标准形式(>= 改成 <=, *-1),然后再转化为松弛形式:
而我们假设的非基本变量全为0,于是有:(x1,x2,x3,x4) = (0,0,2,-1),但是x4 = -1是不满足条件的。即初始解不是基本可行解。
栗子2
再比如下面的例子(栗子2):
其实这个例子就是例子1改变了个符号而已,但是要>=2,然后又要<=1的情况,这个例子显然是无解的。
我们来看看初始解的情况,继续转化为标准形式,然后再转化为松弛形式:
同样的,非基本变量全为0,于是有:(x1,x2,x3,x4) = (0,0,-2,1),但是x3 = -2是不满足条件的。即初始解不是基本可行解。
simplex beta0.99测试
在上面的两个例子中,用我们的simplex beta0.99跑有啥结果呢?
第1个栗子,第一个矩阵为初始的矩阵,接下来是结果和对应的x1,x2值,然后是最后的矩阵
[[ 0. 1. 2. 0. 0.]
[-1. -1. -1. 1. 0.]
[ 2. 1. 1. 0. 1.]]
(-0.0, {})
[[ 0. 1. 2. 0. 0.]
[-1. -1. -1. 1. 0.]
[ 2. 1. 1. 0. 1.]]
可以看到,由于c >=0,直接不迭代了,而这个问题用GLPK计算,正确的结果应该为:z = 1, x1 = 1
第2个栗子:格式同上,结果如下
[[ 0. 1. 2. 0. 0.]
[-2. -1. -1. 1. 0.]
[ 1. 1. 1. 0. 1.]]
(-0.0, {})
[[ 0. 1. 2. 0. 0.]
[-2. -1. -1. 1. 0.]
[ 1. 1. 1. 0. 1.]]
这个应该是无解的。
初始化
从上面的例子中,simplex beta 0.99 可以说是错误的! simplex beta 0.99产生错误的原因就是总把初始解当作基本可行解!
拍拍,打脸( ̄ε(# ̄)
那么如何做才是正确的呢?
问题回到我们的单纯形算法的第一步:找到一个初始的基本可行解。如何找?
我们首先思考上面的问题为什么会不可行。原因就是因为有bi < 0!
因此,对于一个线性规划问题,有如下的情况:
- 若所有的bi >=0 ,说明初始的基本解就是基本可行解,在这种情况下,simplex beta 0.99是正确的。
- 若有bi < 0, 我们需要进行初始化操作,判断其是否有解(如栗子2),并返回一个基本可行解,然后运行simplex beta 0.99
第一种情况就是之前讨论的,这里讨论第二种情况。
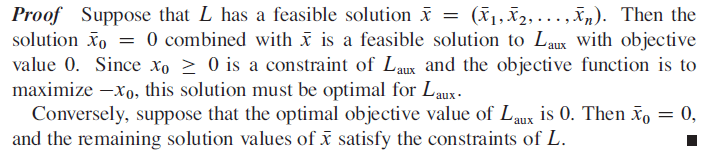
以第一个栗子为例,构造辅助线性规划(auxiliary linear program)如下:
aux,如果Laux的最优解x0为0的话,说明这个原线性方程组有解。
0 和我们最小化x0是一样的。
把Laux 写成松弛形式:
注意到这个初始解(x1,x2,x3,x4,x0) = (0,0,2,-1,0) 也不是基本可行解。现在马上就可以看到引入x0的原因了,我们把x0做为替入变量,选一个b最小的那一行的基本变量作为替出变量(这里是x4),进行一次旋转操作,得:
进行旋转之后,初始解(x1,x2,x3,x4,x0) 变为 (0,0,2,0,1),这就是因为x0 的替入 ,使得所有的b >=0
有人可能会问,上面的例子中,只有一个负的,多个负的怎么办?还能保证么?
答案是可以的,因为我们选择替出的是bi 为负的最小的那一行的基本变量,而一开始,我们构建辅助函数时,x0的系数为-1,因此,旋转的时候,矩阵运算相当于其它每一行减去这一行,而b为负,负负得正,必然最后所有的b都>=0。
现在,我们已经有一个基本可行解了,我们求解这个辅助线性规划即可。
和上面的思想一样,这里要么增大x1, 要么增大x2,假设选择x1,然后第二个等式有最严格的限制,选择x0为替出变量,得1 = 1 – x2 + x4 – x
此时,基本解为:(x1,x2,x3,x4,x0)= (1,0,1,0,0), 此时z = x0 = 0,无法继续增大某个变量使得z继续减少,因此此时为最优解,就是z =0,说明原问题有解。
0是基本变量,那就要旋转去掉它),此外由于x0 = 0,因此可以将其去掉:
0可得:
因此,现在,我们通过构造了一个辅助线性规划Laux 将原来的问题转化为上面的线性规划,并且它的初始解就是基本可行解:(x1,x2,x3,x4) = (1,0,1,0),然后求解这个新的线性规划即可。
我们很幸运的发现(其实是博主偷懒举了个简单的例子(✿◡‿◡)),这里无法通过增大任何的变量使得目标值变小,因此此时就是结果啦,而(x1,x2,x3,x4) = (1,0,1,0) 就是最后的解,z = 1。
下面总结一下上面的过程,
- 若bi都大于等于0 跳到9
- 引入x0,创建一个辅助线性规划 Laux
- 将Laux写成松弛形式
- 选择bi最小的那一行的基本变量为替出变量,x0为替入变量,进行一次旋转操作
- 求解Laux
- 若Laux的最优解为0,那么原问题有解,否则无解,return “no answer”
- 在有解的情况下,若x0为基本解,那么执行一次旋转,把它变为非基本变量
- 恢复原始的目标函数,但是将其基本变量替换掉
- 运行simplex beta 0.99 对新的线性规划方程求解。
PS:有兴趣的读者可以计算一下例子2,会发现辅助函数的最优解不是0,而是0.5,说明无解
完整的单纯形算法
结合simplex beta 0.99和初始化的过程,可以写成如下的simplex 1.0代码(去除版权信息,空行等,也只要40行左右,还是简洁^ ^)
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
|
# -*- coding: utf-8 -*-
# @Date : 2016/11/17
# @Author : hrwhisper
import
numpy
as
np
class
Simplex
(
object
)
:
def
__init__
(
self
,
obj
,
max_mode
=
False
)
:
# default is solve min LP, if want to solve max lp,should * -1
self
.
mat
,
self
.
max_mode
=
np
.
array
(
[
[
0
]
+
obj
]
)
*
(
-
1
if
max_mode
else
1
)
,
max_mode
def
add_constraint
(
self
,
a
,
b
)
:
self
.
mat
=
np
.
vstack
(
[
self
.
mat
,
[
b
]
+
a
]
)
def
_simplex
(
self
,
mat
,
B
,
m
,
n
)
:
while
mat
[
0
,
1
:
]
.
min
(
)
<
0
:
col
=
np
.
where
(
mat
[
0
,
1
:
]
<
0
)
[
0
]
[
0
]
+
1
# use Bland's method to avoid degeneracy. use mat[0].argmin() ok?
row
=
np
.
array
(
[
mat
[
i
]
[
0
]
/
mat
[
i
]
[
col
]
if
mat
[
i
]
[
col
]
>
0
else
0x7fffffff
for
i
in
range
(
1
,
mat
.
shape
[
0
]
)
]
)
.
argmin
(
)
+
1
# find the theta index
if
mat
[
row
]
[
col
]
<=
0
:
return
None
# the theta is ∞, the problem is unbounded
self
.
_pivot
(
mat
,
B
,
row
,
col
)
return
mat
[
0
]
[
0
]
*
(
1
if
self
.
max_mode
else
-
1
)
,
{
B
[
i
]
:
mat
[
i
,
0
]
for
i
in
range
(
1
,
m
)
if
B
[
i
]
<
n
}
def
_pivot
(
self
,
mat
,
B
,
row
,
col
)
:
mat
[
row
]
/=
mat
[
row
]
[
col
]
ids
=
np
.
arange
(
mat
.
shape
[
0
]
)
!=
row
mat
[
ids
]
-=
mat
[
row
]
*
mat
[
ids
,
col
:
col
+
1
]
# for each i!= row do: mat[i]= mat[i] - mat[row] * mat[i][col]
B
[
row
]
=
col
def
solve
(
self
)
:
m
,
n
=
self
.
mat
.
shape
# m - 1 is the number slack variables we should add
temp
,
B
=
np
.
vstack
(
[
np
.
zeros
(
(
1
,
m
-
1
)
)
,
np
.
eye
(
m
-
1
)
]
)
,
list
(
range
(
n
-
1
,
n
+
m
-
1
)
)
# add diagonal array
mat
=
self
.
mat
=
np
.
hstack
(
[
self
.
mat
,
temp
]
)
# combine them!
if
mat
[
1
:
,
0
]
.
min
(
)
<
0
:
# is the initial basic solution feasible?
row
=
mat
[
1
:
,
0
]
.
argmin
(
)
+
1
# find the index of min b
temp
,
mat
[
0
]
=
np
.
copy
(
mat
[
0
]
)
,
0
# set first row value to zero, and store the previous value
mat
=
np
.
hstack
(
[
mat
,
np
.
array
(
[
1
]
+
[
-
1
]
*
(
m
-
1
)
)
.
reshape
(
(
-
1
,
1
)
)
]
)
self
.
_pivot
(
mat
,
B
,
row
,
mat
.
shape
[
1
]
-
1
)
if
self
.
_simplex
(
mat
,
B
,
m
,
n
)
[
0
]
!=
0
:
return
None
# the problem has no answer
if
mat
.
shape
[
1
]
-
1
in
B
:
# if the x0 in B, we should pivot it.
self
.
_pivot
(
mat
,
B
,
B
.
index
(
mat
.
shape
[
1
]
-
1
)
,
np
.
where
(
mat
[
0
,
1
:
]
!=
0
)
[
0
]
[
0
]
+
1
)
self
.
mat
=
np
.
vstack
(
[
temp
,
mat
[
1
:
,
:
-
1
]
]
)
# recover the first line
for
i
,
x
in
enumerate
(
B
[
1
:
]
)
:
self
.
mat
[
0
]
-=
self
.
mat
[
0
,
x
]
*
self
.
mat
[
i
+
1
]
return
self
.
_simplex
(
self
.
mat
,
B
,
m
,
n
)
|
上面的代码中,将旋转操作独立为一个方法(23~27),将单纯形算法的核心也独立为一个方法(14~21),这是考虑到要多次调用的原因,并且代码之前的几乎没什么变化,这里不做过多的解释。
主要变化在于solve方法,30~32和之前是一样的,不解释 ♪(^ ∇^*)
33行判断是否有一个b < 0 ?如果有,说明初始解不可行。否则直接执行45行,调用单纯形算法
34~44处理的是不可行的情况,
- 34:首先找一个最小b的下标
- 35和36作用在于保存原来的目标函数,并将第0行设为0,然后添加x0 需要拼接矩阵,其实就是构造辅助线性规划Laux
- 37执行旋转操作,使其初始解可行
- 38行求解Laux 最优值是否为0,是就是有解,否则无解
- 40-41行若最后的x0是基本解,找一个第0行不是0的元素作为替入变量,将x0替出
- 42~44 恢复初始目标函数,删除x0那一列,并且替换目标函数中的基本变量。
好了,代码还是很短,其实能更短,但是会影响可读性!
再来高呼: Python 大法好!
从几何角度看单纯形算法
上面我们介绍单纯形算法的时候,是通过最直观的等式变换(就是旋转操作)介绍的。
我们知道,线性规划就是在可行域围成的多胞形中求解,现在从几何的视图来看看单纯形算法。
只需考虑顶点
让我再次召唤之前的图:
直观上看,最优解就在顶点上,不需要考虑内部点。
一个引入的证明
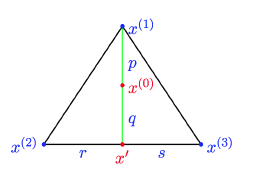
我们假设x(0) 是最优解,连接x(1)和x(0) 与 x(2)和x(3)相交于点x’
我们可以把x(0) 分解,x(0) = λ1 x(1) + (1 – λ1)x’ 其中λ1 = p / (p + q)
同样的把x‘ 分解,x’ = λ2 x(2) + (1 – λ2)x(3) 其中λ2 = r / (r + s)
因此有:x(0) = λ1 x(1) + (1 – λ1)λ2 x(2) + (1 – λ1) (1 – λ2)x(3),而λ1 + (1 – λ1)λ2 + (1 – λ1) (1 – λ2) = 1
设 cT x(1) 小于等于 cT x(2), cT x(3),因此有:
因此,x(1) 并不比x(0) 差。
我们可以推广到更多的情况。(见附件的68页)
多边形的顶点等价于矩阵的基
上面提到,最优解一定在顶点上,我们不需要考虑内部的点。
那么,如何获得顶点呢?
可以证明,顶点就是基,基就是顶点。(见附件的72-78页)
我们只需要找到矩阵的基就好了。
顶点的游走
我们知道,多边形的顶点就是基,且最优解在顶点上,我们需要做的就是,按照一定的规则沿着边遍历顶点,直到不能更新了为止。
如何从一个顶点到另一个顶点?更新到什么时候为止?
我们先讨论第一个问题。
还是一开始介绍单纯形算法的例子: