自组网(无人机FANET)简单介绍
首先看一段对Ad Hoc的介绍:
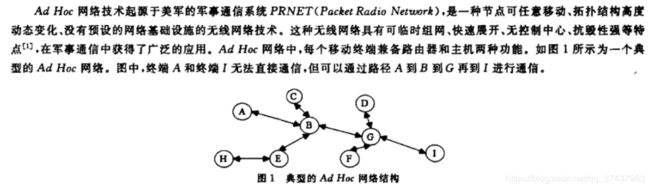
如上所说,每个节点兼备路由器和主机的功能,即每个节点既可以作为发送节点也可以是接收节点,不需要其他基础设施的辅助,移动中的节点集群可以自组织网络互相通讯。以下主要研究的是无人机作为节点自组织网络通讯。
首先先看看无人机网络的特点:1、无人机节点能量有限;2、网络拓扑变化更加频繁;3、无中心、每个节点地位一样;4、通常采用wifi通讯,带宽有限。
无人机自组网一个研究热点就是路由协议。由于以上的几个特点,设计一个高效的路由协议对于无人机自组网十分重要。无人机自组网中传输路径大多为多跳传输,FANET中节点网络拓扑变化频繁,无人机节点进网和退网较为频繁,这都给网络的建立和维护造成了困难。下图为无人机自组网的分类:
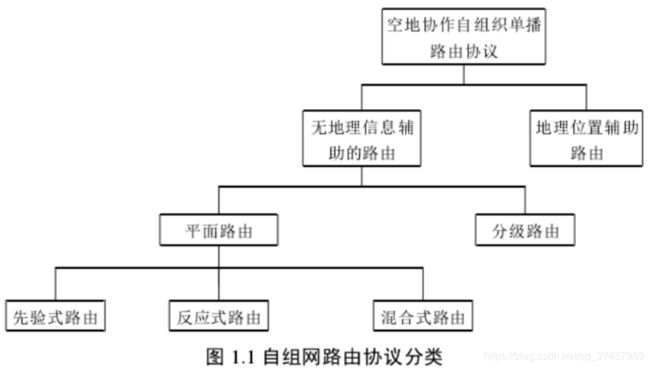
地理位置辅助路由是基于位置信息的路由协议,通过定位获取网络中节点的实时地理位置信息,通过获取的节点位置信息优化网络的路由性能。
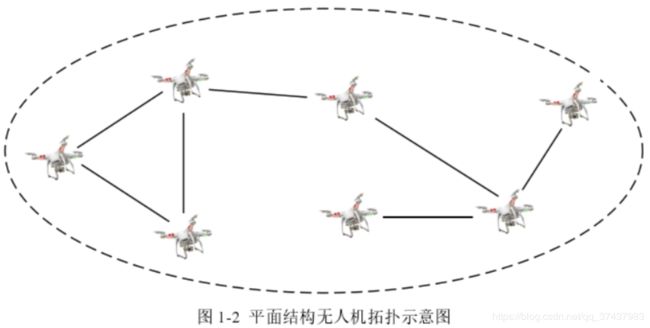
平面路由:网络健壮性强,节点间一般存在多条路径,可修复性好且负载均衡,并具有不错的安全性。当无人机规模变大时,很难进行有效的网络的控制与管理,协议所占用过多的带宽会使正常的数据无法进行传输,只适用于中小型规模的无人机网络。
分级路由:分级结构的FANET由多个簇构成,每个簇中有簇头和簇成员两种角色,簇头通过中继节点或者其他簇头进行簇间通信。簇头与中继节点共同组成无人机的骨干路由网络。分簇路由算法中的通信主要分为两种,簇内通信与簇间通信。在进行簇间通信时,源节点先把信息交给其对应的簇头,簇头再通过骨干路由网络将数据传输到其他簇之中。分簇路由算法有两个主要的研究问题:簇头的选择和簇的维护方法。簇头节点既要负责管理簇内的成员,又要负责簇间的通信,选择一个合适的簇头对提高网络的性能来说十分关键。目前大部分有关分簇网络的研究都是针对簇头选举的方法做出的改进。分簇路由算法的设计目标是构造并实现一个能够达成簇与簇之间进行通信、簇内部进行通信的拓扑结构,以此完成路由寻路等功能。优点是具有更少的通信开销与计算量,也具有更高的通信效率,且其分层结构决定了它具有更好的可扩展性。常见的分簇算法有:最小ID分簇;最高节点度分簇算法;最小簇变换分簇算法;最低移动性分簇算法;加权分簇算法等。其中加权分簇算法定性、定量分析节点移动性、节点度、节点间相对距离和节点的剩余能量等因素,计算权重,之后根据权值最大值法则在此节点的通信范围内的所有节点中选出簇头。每个因素都有对应的权值系数,计算所有的节点权值之和,相加后得到总权值,比较适应不同场景。
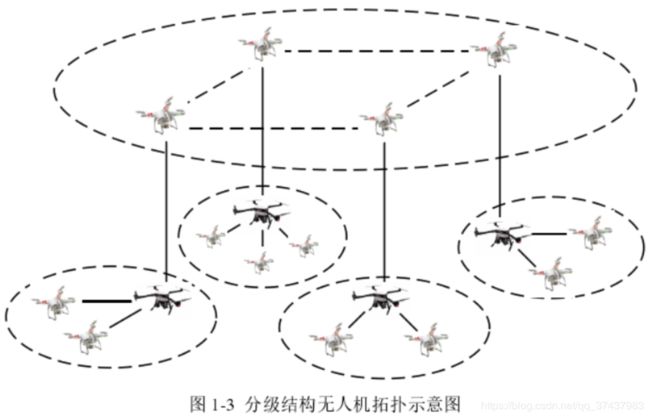
从以上两种结构来看,针对于不同需求的无人机网络,平级和分级结构各有优劣,当网络中节点个数较少时,平面结构的网络结构简单,与分级结构相比,不需维护簇结构,维护成本低,网络健壮性较强,相对安全。但当网络中节点个数较多时,平面结构由于路由控制消息过多,寻路和维护时产生的开销较大,占用的带宽过多,不利于无人机之间信息的传输,此时分级无人机网络具有更好的性能。分级结构由于其独特的簇结构,寻路和维护的开销都相对较小,并且其拥有很强的可扩充性,在节点数量较多
时,与平面结构相比具有较大的优势。
先应式路由:节点定期广播路由信息,周期性地更新自己所维护的全局路由列表,时刻关注网络拓扑的变化。适用于中小规模的无人机网络,延迟小,但维护全网拓扑信息开销很大。例如OLSR和DSDV。
反应式路由:节点只在通讯时发起路由,并且只需要与邻居节点互相交换信息。路由开销小,但路由寻路延迟大。适用于大规模无人机网络。例如AODV和DSR。
---------------------------------------分界线-------------------------------------------------
下面介绍反应式路由中的AODV路由协议。
AODV路由协议支持动态,多跳,自启动的Ad hoc网络,当节点有通信需求时才会发送请求建立通信链路,节点只需要通过HELLO消息维护和周围邻居节点的信息,且在通信过程中,不参与通信的节点无需维护通信路由。AODV路由算法的本质是动态的,它允许高速移动的节点能够非常快速的创建路由并找到目的地,当链路中某一节点损坏时,它能依据一定的路由修复手段对链路进行及时修复。
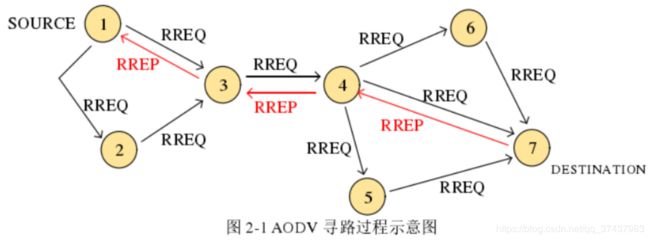
AODV路由发现:寻路过程主要依靠RREQ与RREP两个数据包协作完成。初始节点将在发现周围节点没有目标节点的情况下,将广播RREQ,开启AODV的路由请求机制;中间节点接收到RREQ后会判断自身维护的节点是否存在目标节点,如果不存在,继续转发;找到目标节点后,目标节点发回RREP路由应答,初始节点收到RREP后建立与目标节点的通讯。AODV以跳数为判据进行寻路,中间节点收到RREQ时,会读取数据包中的跳数位,如果该跳数小于本地缓存的,则更新,如本地不存在则建立,即保证到达本节点的跳数时最小的,正向路由和反向路由都会如此。
AODV采取了按需驱动的方式,无需时刻维护整个网络拓扑的信息,降低了网络对每个节点的内存需求,减少了某些不必要的转发;通过转发过程中中间节点的回复机制,可以大大地降低寻找路由的时间,快速的建立通信链路;通过本地修复与源节点修复相结合的方式可以有效的降低丢包率,确保数据能够准确的传输到目的节点;引入了序列号机制可以避免路由环路的产生。但也应对无人机网络存在缺点:
1、AODV 的寻路方式是有通信需求时才发起路由请求建立路由,存在通讯延迟,存在很大的路由开销;
2、AODV的路由判据为跳数最少,然而,针对无人机网络网络拓扑变化快,能量有限的特点来说,如果中间节点的飞行方向、速度与源节点差别较大,或者中间节点的能量即将耗尽,这都会造成所建立的路由在很短的时间内就会断裂,产生巨大的路由开销、丢包与时延。
3、AODV 是一种平面路由协议,对于节点数量多,尤其是节点大量移动大规模的无人机网络,AODV 路由协议很难实现有效的路由管理,网络的可扩充性差。由于节点之间的地位都是平等的,广播的路由包会充斥着整个网络,占用很大的带宽。
---------------------------------------分界线-------------------------------------------------
论文内容简单解读
《无人机自组网 AODV 路由协议的研究与优化》
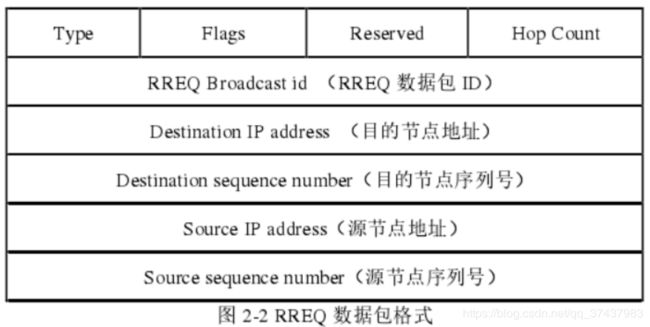
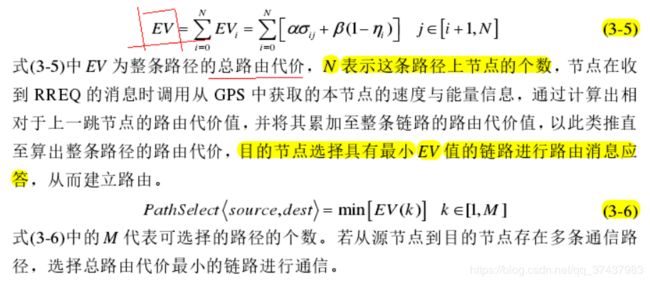
1、为了使链路稳定,适应频繁变化的网络拓扑,是其对速度与能耗敏感,改变路由寻路依据,引入“路由代价”参数,源节点和目标节点之间存在多条通讯路径时,选择路由代价最小的链路通讯。为了支持改路由寻路依据需要修改RREQ和RREP数据包,在其中加入x、y方向的分速度数据域和路由代价值数据域;对应的路由表也需要添加路由代价数据域。
2、在1的基础上,引入分级的思想,选择邻居节点中节点稳定度最大的成为簇首,并将自己的身份置为 HEADER 过 HELLO 包广播给邻居节点,节点通过接收到的簇头的 HELLO 信息逐渐判断自身身份,直到网络中所有的节点都拥有了自己的身份,不同的身份执行不同的任务,形成簇结构。定义同时存在于两个或两个以上簇的节点为转发节点。
当源节点请求发包时,若发现其没有到目的节点的有效路径,就会广播 RREQ 消息,收到 RREQ 消息的节点判断自身的身份,根据不同身份做出不同的处理。在转发 RREQ 的过程中,只有簇头节点和转发节点会参与转发,普通节点直接丢弃 RREQ
包,直到消息抵达目的节点。目的节点回复 RREP 时,同样也只有簇头节点和转发节点参与消息的转发。

从上计算稳定度的公式可以看出,这里只考虑了邻居数和甚于的能量,论文中介绍是为了提高可实现性和降低维护的难度,过于复杂的算法不适合无人机的簇头选举与维护。文中维护时周期性的,周期内簇头不变,所以需要确保了每一轮簇头选举周期内都由性能最佳的节点充当簇头,不会造成某一架无人机过早的消耗完能量而退出群组。
为了首先簇头选取,需要对周围邻居节点个数和稳定度进行感知。所以需要修改邻居表,添加稳定度和节点身份数据域。节点身份:簇头HEADER、普通节点 NORMAL、转发节点 FORWARD 和未定义的节点 UNDECIDE。同时还需要修改hello包,添加稳定度和节点身份数据域。
簇头的维护:在一个簇头选举的周期之内,已经被选为簇头的节点不会发生变化,即使其周围有比起节点稳定度更高的节点出现,也不会更改其 HEADER 的身份,确保了一个选举周期之内簇结构的稳定。簇头选举周期适无人机网络拓扑变化程度而定,若网络拓扑变化慢,则将选举周期延长,避免重新分簇时产生的大量开销;若网络拓扑变化快,则将簇头选举周期适当缩短,使当前簇头最为适应当前的网络。
《近距离空地协作视频自组织通信路由协议研究》
1、视频自组织通信实时性优先路由算法:路由选择时选择下一时刻和源节点运动方向相同概率最大的节点作为路由中继节点。使用马尔可夫链预测节点的运动方向,选择节点下一刻运动方向与当前节点下一刻运动方向相同概率最大的节点转发,最后得到一个概率集合![]() ,其中每个元素对于其上一跳运动方向相同概率都是最大的。
,其中每个元素对于其上一跳运动方向相同概率都是最大的。
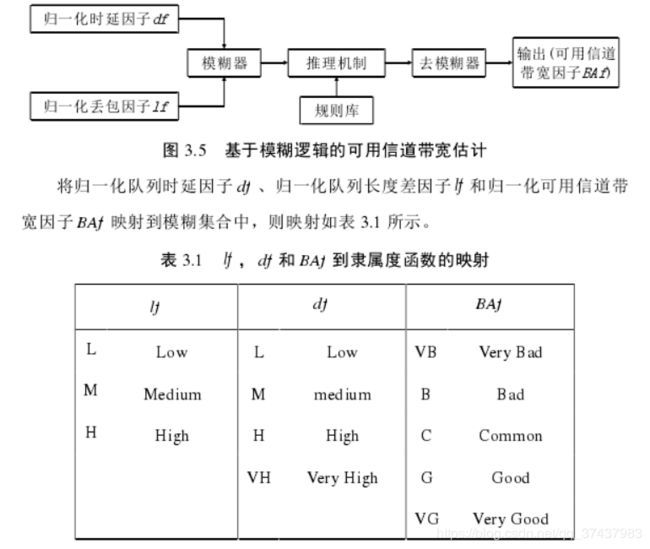
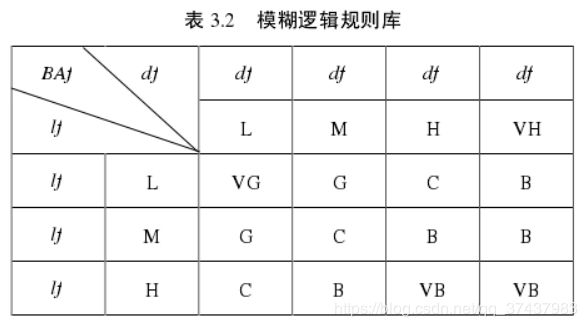
2、视频自组织通信可靠性优先路由算法:预测链路带宽,选择带宽最大的链路传输。过程中考虑瓶颈链路,即在所有可选链路中,比较每条链路的瓶颈链路的带宽值,选择其中值最大的作为通讯链路。路由的建立需要考虑当前可用带宽是否低于通讯的最小带宽,如果小于则重建。预测带宽使用的模糊推理:输入为延迟和丢包,输出为预测带宽。架构、映射和规则库如下。
参考
《近距离空地协作视频自组织通信路由协议研究_吴哲》
《无人机自组网AODV路由协议的研究与优化_吴建泽》
《Adhoc网络中的分簇算法比较》
《自组网路由协议综述》
《无人机自组网路由协议研究_张国峰》