Autoware 的安装与官方Demo的运行
(注:以下过程是本人亲自走过的过程,使用的是清华源,Ubuntu1604,ROS Kinetic,CPU版本的,安装的Autoware.AI为1.12.0版本,参考官方网址为https://gitlab.com/autowarefoundation/autoware.ai/autoware/wikis/Source-Build,如果需要其他版本的亲自行去官方按照步骤进行安装,这里不再提供。)
程序运行所需环境:
运行系统:Ubuntu1604
运行环境:ROS Kinetic,CPU版本
一、Autoware.AI的安装:
1.安装所需依赖(按步骤顺序往下执行)
sudo apt-get update
sudo apt-get install -y python-catkin-pkg python-rosdep ros-$ROS_DISTRO-catkin gksu
sudo apt-get install -y python3-pip python3-colcon-common-extensions python3-setuptools python3-vcstool
pip3 install -U setuptools
补充:如果第一步出现了以下错误(Reading package lists... Done E: Could not get lock /var/lib/apt/lists/lock - open (11: Resource temporarily unavailable)E: Unable to lock directory /var/lib/apt/lists/)可以使用以下命令来消除错误。
sudo rm /var/lib/apt/lists/lock
sudo rm /var/cache/apt/archives/lock
sudo rm /var/lib/dpkg/lock*
sudo dpkg --configure -a2.创建工程(For 1.12.0 and Newer)
(1)创建一个工作空间
mkdir -p autoware.ai/src
cd autoware.ai
(2)下载autoware.ai的工作空间的配置(For the 1.12.0 release:)
wget -O autoware.ai.repos "https://gitlab.com/autowarefoundation/autoware.ai/autoware/raw/1.12.0/autoware.ai.repos?inline=false"(3)下载autoware.ai到工作区
vcs import src < autoware.ai.repos补充:如果这一步下载的时候,网络不好或者下载不下来,可以使用我下面提供的百度网盘链接进行下载,仅供大家一起研究交流使用。(链接: https://pan.baidu.com/s/1QOU7ifsgO56snrf6PS0yPA 提取码: j5aj )
(4)使用rosdep安装依赖项
rosdep update
rosdep install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRO
(5)编译
colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release至此Autoware.AI工程已经安装完毕,接下来是使用官方给出的例子进行示例使用演示。
二、Autoware.AI的demo使用(参考官方网址https://gitlab.com/autowarefoundation/autoware.ai/autoware/wikis/ROSBAG-Demo):
1、数据下载(可以点击后面的link直接下载,也可以使用命令进行下载)
(1)Download the sample 3D pointcloud/vector map data. [link]
wget http://db3.ertl.jp/autoware/sample_data/sample_moriyama_data.tar.gz(2)Download the sample ROSBAG data (LiDAR: VELODYNE HDL-32E, GNSS: JAVAD GPS RTK Delta 3). [link]
wget http://db3.ertl.jp/autoware/sample_data/sample_moriyama_150324.tar.gz2、Demo运行
(1)创建.autoware目录并在并提取demo所需数据(From source)
cd ~
mkdir .autoware
cd .autoware
cp ~/Downloads/sample_moriyama_* .
tar zxfv sample_moriyama_150324.tar.gz
tar zxfv sample_moriyama_data.tar.gz
(2)运行Autoware(For Autoware version 1.12.0 and Newer)
cd autoware.ai
source install/setup.bash
roslaunch runtime_manager runtime_manager.launch
(3)运行起来之后,需要加载demo示例的data,点击Simulation功能,找到如下图所示路径的bag包,加载完毕之后点击play,然后再点击Pause。

(4)在点击Quick Start 功能按钮,然后分别点击右侧Ref按钮,分别加载下图中所示路径的对应文件,然后按需点击左侧相对应的启动按钮,点击完毕后会变颜色。(对应路径autoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/rosbag_demo/)

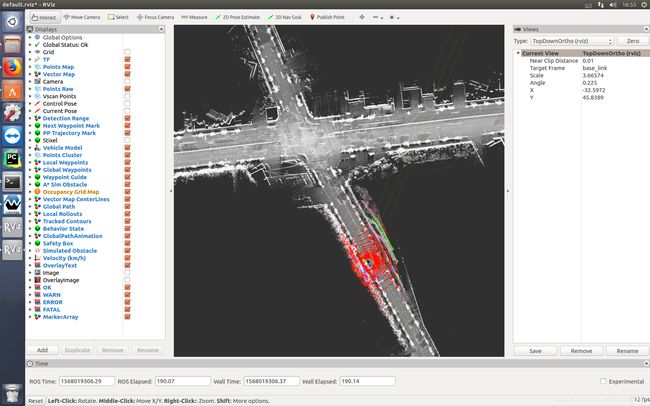
(5)然后再点击Rviz按钮启动rviz插件,找到File -> Open Config,然后按照下面的步骤顺序并加载 .rviz 文件。
autoware.ai/src/autoware/documentation/autoware_quickstart_examples/launch/rosbag_demo/default.rviz
最后点击前面提到的play按钮即可在rviz里看到数据显示,如下图所示:
至此,Autoware.AI的安装与官方demo的使用已经全部部署完毕。可能有不周全之处,大家可以相互交流!谢谢!