线性回归 实现
目录
线性规划从零开始
线性回归pytorch
说明:本文参考了Dive-into-DL-PyTorch的学习笔记这本书
线性规划从零开始
1.导入开发过程中需要的包
%matplotlib inline
import torch
from IPython import display
from matplotlib import pyplot as plt
import numpy as np
import random
print(torch.__version__)
torch.set_default_tensor_type('torch.FloatTensor')![]()
2.生成数据集
训练数据集是人工构造的,样本数是1000,特征数是2。样本数是随机生成的。true_w是该模型的真实权重,true_b是真实偏差

其中使用了一个随机噪声项,该噪声项服从均值为0,标准差为0.01的正态分布。其代表了数据集中无意义的干扰。
num_inputs = 2
num_examples = 1000
true_w = [2, -3.4]
true_b = 4.2
features = torch.randn(num_examples, num_inputs)
labels = true_w[0] * features[:, 0] + true_w[1] * features[:, 1] + true_b
labels += torch.tensor(np.random.normal(0, 0.01, size=labels.size()), dtype=torch.float)
print(features[0], labels[0]) ![]()
def use_svg_display():
# 用矢量图显示
display.set_matplotlib_formats('svg')
def set_figsize(figsize=(3.5, 2.5)):
use_svg_display()
# 设置图的尺寸
plt.rcParams['figure.figsize'] = figsize
# # 在../d2lzh_pytorch里面添加上面两个函数后就可以这样导入
# import sys
# sys.path.append("..")
# from d2lzh_pytorch import *
set_figsize()
plt.scatter(features[:, 1].numpy(), labels.numpy(), 1);
3.读取数据
在训练模型的时候,我们需要遍历数据集并不断读取小批量数据样本。这里我们定义一个函数:它每次返回 batch_size (批量大小)个随机样本的特征和标签。
让我们读取第一个小批量数据样本并打印。每个批量的特征形状为
(10, 2)
,分别对应批量大小和输入个
数;标签形状为批量大小。
# 本函数已保存在d2lzh包中方便以后使用
def data_iter(batch_size, features, labels):
num_examples = len(features)
indices = list(range(num_examples))
random.shuffle(indices) # 样本的读取顺序是随机的
for i in range(0, num_examples, batch_size):
j = torch.LongTensor(indices[i: min(i + batch_size, num_examples)]) # 最后一次可能不足一个batch
yield features.index_select(0, j), labels.index_select(0, j)
batch_size = 10
for X, y in data_iter(batch_size, features, labels):
print(X, '\n', y)
break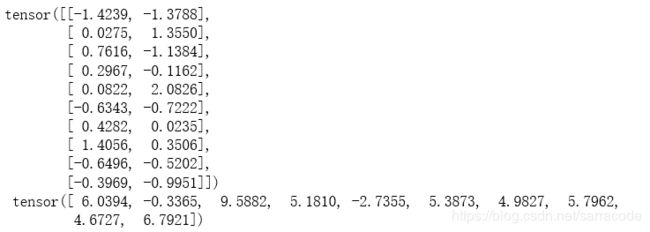
4.初始化模型参数
将权重初始化成均值为
0
、标准差为
0.01
的正态随机数,偏差则初始化成
0
。
之后的模型训练中,需要对这些参数求梯度来迭代参数的值,因此我们要让它们的 requires_grad=True 。
w = torch.tensor(np.random.normal(0, 0.01, (num_inputs, 1)), dtype=torch.float)
b = torch.zeros(1)
w.requires_grad_(requires_grad=True)
b.requires_grad_(requires_grad=True) ![]()
5.定义模型
使用
mm
函数做矩阵乘法。
def linreg(X, w, b): # 本函数已保存在d2lzh包中方便以后使用
return torch.mm(X, w) + b6.定义损失函数
def squared_loss(y_hat, y): # 本函数已保存在pytorch_d2lzh包中方便以后使用
return (y_hat - y.view(y_hat.size())) ** 2 / 27.定义优化算法
sgd 函数实现了
小批量随机梯度下降算法。它通过不断迭代模型参数来优化损失
函数。这里自动求梯度模块计算得来的梯度是一个批量样本的梯度和。我们将它除以批量大小来得到平
均值。
def sgd(params, lr, batch_size): # 本函数已保存在d2lzh_pytorch包中方便以后使用
for param in params:
param.data -= lr * param.grad / batch_size # 注意这里更改param时用的param.data8.训练模型
在训练中,我们将多次迭代模型参数。在每次迭代中,我们根据当前读取的小批量数据样本(特征
X
和 标签 y
),通过调用反向函数
backward
计算小批量随机梯度,并调用优化算法
sgd
迭代模型参数。由于我们之前设批量大小 batch_size
为
10
,每个小批量的损失
l
的形状为
(10, 1)
。回忆一下自动求梯度一节。由于变量 l
并不是一个标量,所以我们可以调用
.sum()
将其求和得到一个标量,再运行l.backward() 得到该变量有关模型参数的梯度。注意在每次更新完参数后不要忘了将参数的梯度清
零。在一个迭代周期(epoch
)中,我们将完整遍历一遍
data_iter
函数,并对训练数据集中所有样本都使用一次(假设样本数能够被批量大小整除)。这里的迭代周期个数 num_epochs
和学习率
lr
都是超参数,分别设3
和
0.03
。在实践中,大多超参数都需要通过反复试错来不断调节。虽然迭代周期数设得越大模型可能越有效,但是训练时间可能过长。
lr = 0.03
num_epochs = 3
net = linreg
loss = squared_loss
for epoch in range(num_epochs): # 训练模型一共需要num_epochs个迭代周期
# 在每一个迭代周期中,会使用训练数据集中所有样本一次(假设样本数能够被批量大小整除)。X
# 和y分别是小批量样本的特征和标签
for X, y in data_iter(batch_size, features, labels):
l = loss(net(X, w, b), y).sum() # l是有关小批量X和y的损失
l.backward() # 小批量的损失对模型参数求梯度
sgd([w, b], lr, batch_size) # 使用小批量随机梯度下降迭代模型参数
# 不要忘了梯度清零
w.grad.data.zero_()
b.grad.data.zero_()
train_l = loss(net(features, w, b), labels)
print('epoch %d, loss %f' % (epoch + 1, train_l.mean().item()))
训练完成后,我们可以比较学到的参数和用来生成训练集的真实参数。它们应该很接近。
print(true_w, '\n', w)
print(true_b, '\n', b)
线性回归pytorch
1.导入具体的包
import torch
from torch import nn
import numpy as np
torch.manual_seed(1)
print(torch.__version__)
torch.set_default_tensor_type('torch.FloatTensor')2.生成数据集
人工构造训练数据集,样本数是1000,特征数是2。true_w是真实权重,true_b是真实偏差。进行随机构造特征值。
此外真实值中包含噪声项,该噪声项服从均值为0,标准差为0.01的正态分布,代表了数据集中无意义的干扰。
num_inputs = 2
num_examples = 1000
true_w = [2, -3.4]
true_b = 4.2
features = torch.tensor(np.random.normal(0, 1, (num_examples, num_inputs)), dtype=torch.float)
labels = true_w[0] * features[:, 0] + true_w[1] * features[:, 1] + true_b
labels += torch.tensor(np.random.normal(0, 0.01, size=labels.size()), dtype=torch.float)3.读取数据
PyTorch提供了 data 包来读取数据。由于 data 常用作变量名,我们将导入的 data 模块用 Data 代替。
在每一次迭代中,我们将随机读取包含10个数据样本的小批量。
import torch.utils.data as Data
batch_size = 10
# 将训练数据的特征和标签组合
dataset = Data.TensorDataset(features, labels)
# 把 dataset 放入 DataLoader
data_iter = Data.DataLoader(
dataset=dataset, # torch TensorDataset format
batch_size=batch_size, # mini batch size
shuffle=True, # 要不要打乱数据 (打乱比较好)
num_workers=2, # 多线程来读数据
)
for X, y in data_iter:
print(X, '\n', y)
break
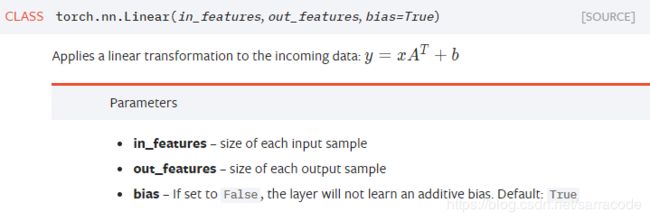
4.定义模型
在pytorch官网上找到nn.Linear的解释如下:
class LinearNet(nn.Module):
def __init__(self, n_feature):
super(LinearNet, self).__init__()
self.linear = nn.Linear(n_feature, 1)
def forward(self, x):
y = self.linear(x)
return y
net = LinearNet(num_inputs)
print(net) # 使用print可以打印出网络的结构 
用 nn.Sequential 来更加方便地搭建网络, Sequential 是一个有序的容器,网络层将按照在传入 Sequential 的顺序依次被添加到计算图中。由于在这个里面只添加了一个线性网络Linear,因此容器的个数为1,下标为0。
net = nn.Sequential(
nn.Linear(num_inputs, 1)
# 此处还可以传入其他层
)
print(net)
print(net[0]) 
for param in net.parameters():
print(param)
5.初始化模型参数
通过 init.normal_ ()将权重参数每个元素初始化为随机采样于均值为0、标准差为0.01的正态分布。偏差会初始化为零。
from torch.nn import init
init.normal_(net[0].weight, mean=0.0, std=0.01)
init.constant_(net[0].bias, val=0.0) # 也可以直接修改bias的data: net[0].bias.data.fill_(0)
![]()
for param in net.parameters():
print(param)
6.定义损失函数
loss = nn.MSELoss()7.定义优化算法
import torch.optim as optim
optimizer = optim.SGD(net.parameters(), lr=0.03)
print(optimizer)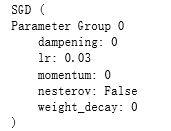
8.训练模型
我们通过调用 optim 实例的 step 函数来迭代模型参数。按照小批量随机梯度下降的定义,我们在 step 函数中指明批量大小,从而对批量中样本梯度求平均。
num_epochs = 3
for epoch in range(1, num_epochs + 1):
for X, y in data_iter:
output = net(X)
l = loss(output, y.view(-1, 1))
optimizer.zero_grad() # 梯度清零,等价于net.zero_grad()
l.backward()
optimizer.step()
print('epoch %d, loss: %f' % (epoch, l.item()))
dense = net[0]
print(true_w, dense.weight.data)
print(true_b, dense.bias.data)![]()