霍夫变换(Hough Line Transform)-直线检测
OpenCV官网
参考1
原理
- 直角坐标表示
- 用 y = m x + b y=mx+b y=mx+b 描述一条直线, m是斜率, b是截距,m和b是参数。
- 如果将上面 的式子改写: b = − m x + y b=-mx+y b=−mx+y ,x和y 是参数。
根据以上两个式子得出结论:给定一个点(x,y),对应到 2 上就是一条直线,x 相当于斜率,y相当于截距。如果给定一系列的点(x1,y1)、(x2,y2)、(x3,y3)…都在一条直线上,也就是满足 y = m x + b y=mx+b y=mx+b,那么对应到 2 中,每个点对应的线将交于一点。 但是由于 参数 m 和 b可能比较大,所以采用极坐标比较合适。

- 极坐标系表示
- 极坐标系,一条直线的表示,知道 r r r 和 θ \theta θ ,确定一条直线(红色):
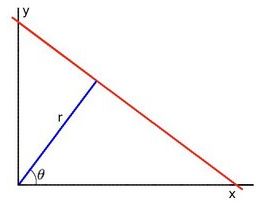

- 整理后:
Image Space中每一个点对应到 Parameter Space 中就是一条曲线(三角函数曲线)。在Image Space中的一条直线上,对应到Parameter Space 中 也是相交于一点(只看 r > 0 r>0 r>0 和 0 < θ < 2 π 0<\theta < 2\pi 0<θ<2π):

- 检测方法
- 对于图像的每个像素点(x,y),对应到参数空间中,找到交点,交于此点的曲线个数就是图像空间的直线上的像素点数。
- 设置一个阈值,交于一点曲线个数超过这个值,图像中才算一条直线;在图像空间中意味着参数为( r , θ r,\theta r,θ)的直线。
代码
#include 
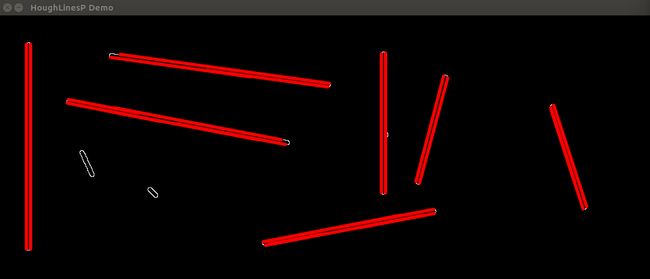
结果:


OpenCV API
(不建议使用)
void cv::HoughLines
(
InputArray image, // 8bits 单通道灰度 图像
OutputArray lines, // vector (ρ,θ) ,ρ和θ是极坐标,θ弧度制,范围 0- π 2 \frac{\pi}{2} 2π, 横轴为0,纵轴为 π 2 \frac{\pi}{2} 2π
double rho, // r 的步长(没明白),一般设1
double theta, //θ部长(没明白),一般设置CV_PI/180
int threshold, // votes 的阈值,只有大于这个的点数的线,才会被检测
double srn = 0, // 处理多尺度图像,一般默认即可
double stn = 0, //处理多尺度图像,一般默认即可
double min_theta = 0, // 默认即可
double max_theta = CV_PI //默认即可
)
(建议使用)
void cv::HoughLinesP
(
InputArray image, // 8bits 单通道灰度图像
OutputArray lines, // 4-element vector (x1,y1,x2,y2) (x1,y1)和(x2,y2)是直线的端点
double rho, // r 的步长(没明白),一般设1
double theta, // θ部长(没明白),一般设置CV_PI/180
int threshold, //直线点数的阈值,>threshold才会被检测
double minLineLength = 0, //小于此点数的直线将会被删除
double maxLineGap = 0 //同一条直线上两点的最小Gap
)