ICNet模型介绍 与论文解读
ICNet模型介绍



Semantic Segmentation--ICNet for Real-Time Semantic Segmentation on High-Resolution Images论文解读
原
Semantic Segmentation--ICNet for Real-Time Semantic Segmentation on High-Resolution Images论文解读
2018年01月08日 21:51:02 DFann 阅读数:4549更多
所属专栏: 语义分割-目标检测论文解读
版权声明:如果你觉得写的还可以,可以考虑打赏一下。转载请联系。 https://blog.csdn.net/u011974639/article/details/79007588
ICNet
ICNet for Real-Time Semantic Segmentation on High-Resolution Images
原文地址:ICNet
代码:
- github-Caffe
- TensorFlow
Abstract
ICNet是一个基于PSPNet的实时语义分割网络,设计目的是减少PSPNet推断时期的耗时,论文对PSPNet做了深入分析,在PSPNet的基础上引入级联特征融合模块,实现快速且高质量的分割模型。论文报告了在Cityscape上的表现。
Introduction
现有的语义分割模型在Cityscape上的表现:

可以看到,许多高质量的分割模型的推理速度远远达不到实时要求。本文的目的是在不牺牲过多分割质量的前提下提高模型推理速度,达到实时要求。本文是在PSPNet的基础上,找了一个accuracy和speed上的平衡点。
论文的主要贡献在于:
- 综合低分辨率图像的处理速度和高分辨率图像的推断质量,提出图像级联框架逐步细化分割预测
- 本文提出的ICNet达到了5x以上的加速,并减少了5x倍以上的内存消耗
- ICNet可以在1024×2048
- 1024×2048分辨率下保持30fps运行
Related Work
最近CNN表现出比传统方法强大的特征提取能力。
-
高质量的语义分割模型: 先驱工作FCN将FC层换为卷积层; DeepLab等使用空洞卷积(dilated convolution);Encoder-Decoder结构融合高层的语义和底层的细节;也有使用CRF、MRF模拟空间关系;PSPNet采用空间上的金字塔池化结构。这些方法对于提高性能有效,但不能用于实时系统。
-
快速的语义分割模型:SegNet放弃层信息来提速;ENet是一个轻量级网络,这些方法虽然快,但是性能差
-
视频分割模型: 视频中包含大量冗余信息,可利用减少计算量。etc…
论文给出了一个快速的语义分割的层次结构,采用级联图像作为输入加速推理,构建一个实时分割系统。
Speed Analysis
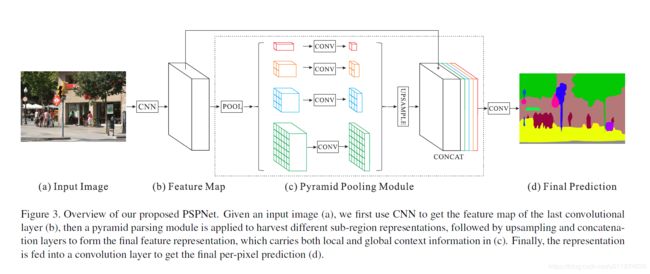
ICNet是基于PSPNet的,我们先分析PSPNet,PSPNet的结构如下:
实时预算(time budget)
先看看图像分辨率对PSPNet的性能影响,下图显示两个分辨率下时间成本:
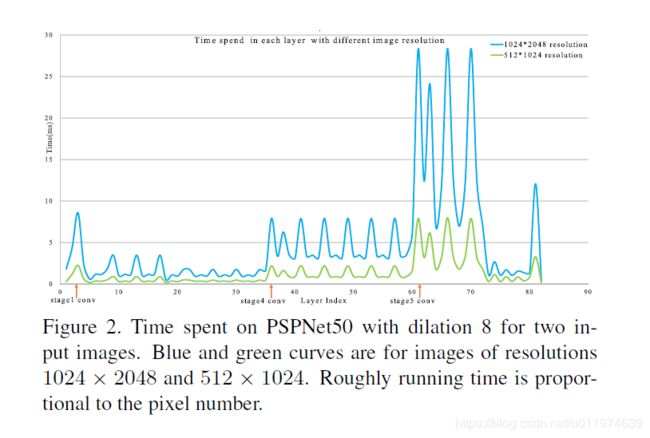
蓝色的分辨率为1024×2048
1024×2048;绿色的分辨率为512×512
512×512。
上图显示了多个信息:
- 不同分辨率下速度相差很大,呈平方趋势增加
- 网络的宽度越大速度越慢。
- 核数量越多速度越慢。例如:虽然stage4和5的分辨率一致,但速度相差很大,因为5比4核数量多1倍
提速方向(Intuitive Speedup)
输入降采样:
依据上面的分析,半分辨率的推断时间为全分辨率的1/4.测试不同分辨率下输入下的预测情况。一个简单的测试方法使用1/2,1/4的输入,将输出上采样回原来的大小。实验如下:
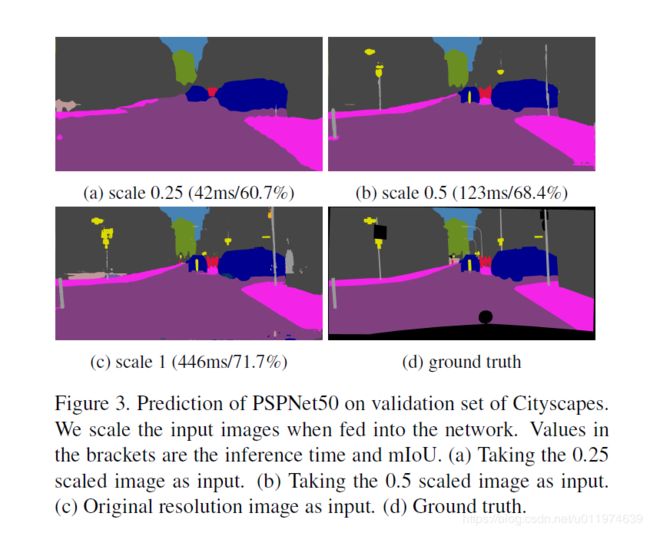
如图所示的几个缺点。在缩放为.25的情况下,虽然推断时间大大简短,但是预测结果非常粗糙,丢失了很多小但重要的细节。缩放0.5相对来说好了很多,但依旧丢失了很多细节,并且最麻烦的是推理速度达不到实时要求了。
特征降采样:
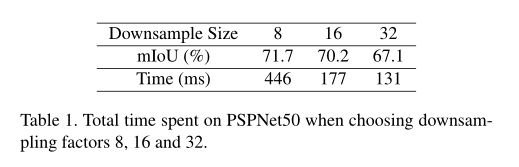
输入能降采样,自然特征也可以降采样。这里以1:8,1:16,1:32的比例测试PSPNet50,结果如下:
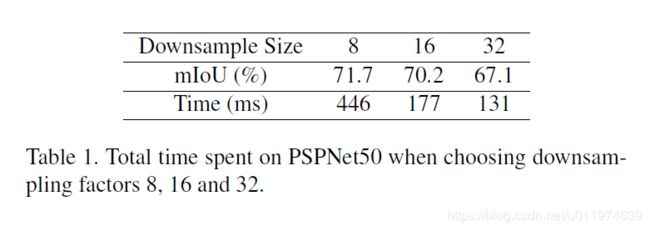
较小的特征图可以以牺牲准确度换取更快的推断,但考虑到使用1:32(132ms)依然达不到实时要求.
模型压缩:
减少网络的复杂度,有一个直接的方法就是修正每层的核数量,论文测试了一些有效的模型压缩策略。即使只保留四分之一的核,推断时间还是很长。并且准确率大大降低了。
Architecture
总结一下前面速度分析的结果,一系列的优化方法:
- 输入分辨率:降低输入分辨率能都大幅度的加速,但同时会让预测非常模糊
- 降低下采样特征:降低下采样可以加速但同时会降低准确率
- 压缩模型:压缩训练好的模型,通过减轻模型达到加速效果,可惜实验效果不佳
ICNet总结了上述几个问题,提出了一个综合性的方法:使用低分辨率加速捕捉语义,使用高分辨率获取细节,使用级联网络结合,在限制的时间内获得有效的结果。
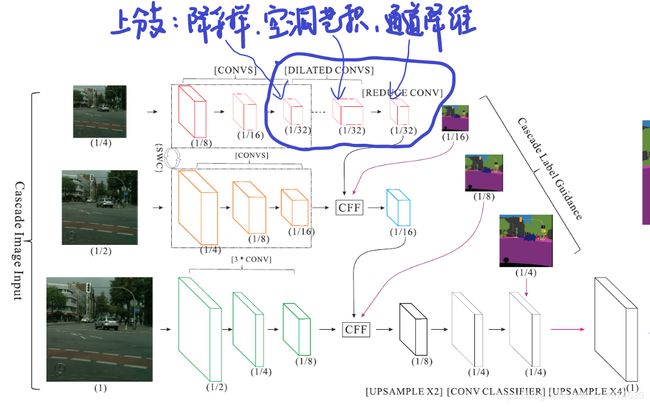
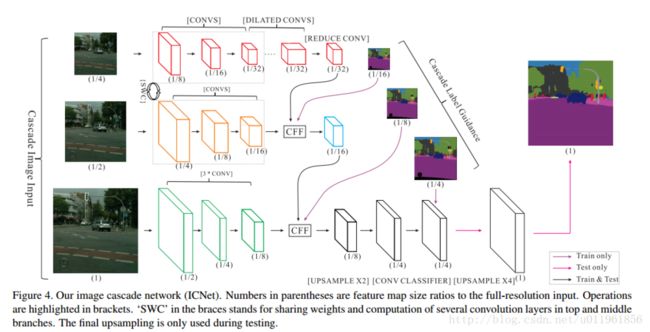
模型结构如下:
图片分为1,1/2,1/4这三个尺度分三路送到模型中(实际代码和这个描述不一致,见后面代码分析),三个分支介绍如下:
| 分支 | 过程 | 耗时 |
|---|---|---|
| 低分辨率 | 在中分辨率的1/16输出的基础上,再缩放到1/32.经过卷积后,然后使用几个dilated convolution扩展接受野但不缩小尺寸,最终以原图的1/32大小输出feature map。 | 虽然层数较多,但是分辨率低,速度快,且与分支二共享一部分权重 |
| 中分辨率 | 以原图的1/2的分辨率作为输入,经过卷积后以1/8缩放,得到原图的1/16大小feature map,再将低分辨率分支的输出feature map通过CFF(cascade feature fusion)单元相融合得到最终输出。值得注意的是:低分辨率和中分辨率的卷积参数是共享的。 | 有17个卷积层,与分支一共享一部分权重,与分支一一起一共耗时6ms |
| 高分辨率 | 原图输入,经过卷积后以1/8缩放,得到原图的1/8大小的feature map,再将中分辨率处理后的输出通过CFF单元融合 | 有3个卷积层,虽然分辨率高,因为少,耗时为9ms |
对于每个分支的输出特征,首先会上采样2倍做输出,在训练的时候,会以Ground truth的1/16、1/8/、1/4来指导各个分支的训练,这样的辅助训练使得梯度优化更为平滑,便于训练收敛,随着每个分支学习能力的增强,预测没有被任何一个分支主导。利用这样的渐变的特征融合和级联引导结构可以产生合理的预测结果。
ICNet使用低分辨率完成语义分割,使用高分辨率帮助细化结果。在结构上,产生的feature大大减少,同时仍然保持必要的细节。
不同分支的预测效果如下:
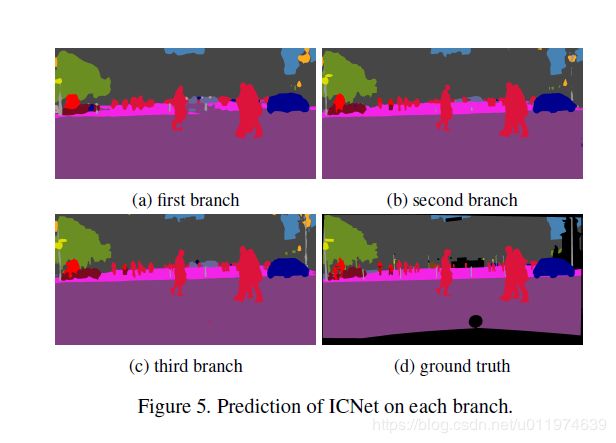
可以看到第三个分支输出效果无疑是最好的。在测试时,只保留第三分支的结果。
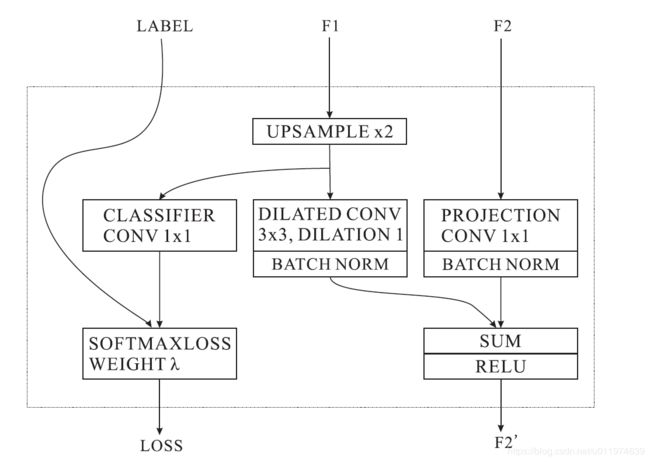
CFF单元
在ICNet中,分支之间的融合是通过CFF模块完成的。结构如下:
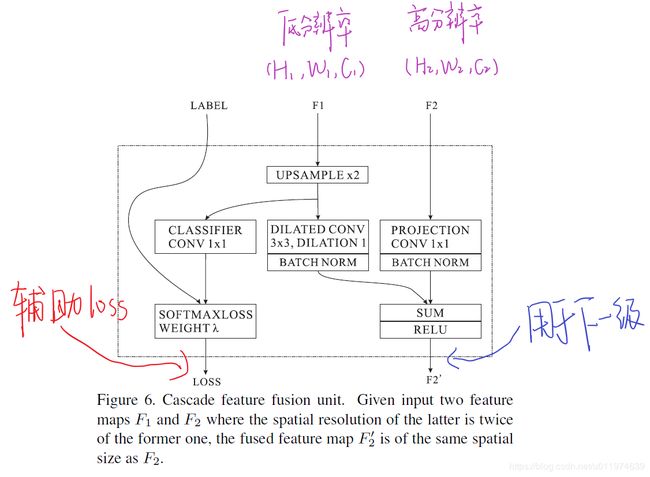
将低分辨率的图片上采样后使用空洞卷积(dilated conv),扩大上采样结果的感受野范围。
注意将辅助的标签引导设置为0.4(依据PSPNet的实验结果),即如果下分支的lossL3
L3的占比λ3λ3设置为1的话,则中分支的lossL2L2的占比λ2λ2设置为0.4,上分支的lossL1L1的占比λ1
λ1设置为0.16。
损失函数和模型压缩
损失函数:
依据不同的分支定义如下:L=λ1L1+λ2L2+λ3L3
L=λ1L1+λ2L2+λ3L3
依据CFF的设置,下分支的lossL3
L3的占比λ3λ3设置为1的话,则中分支的lossL2L2的占比λ2λ2设置为0.4,上分支的lossL1L1的占比λ1
λ1设置为0.16。
压缩模型:
正如前面所述,压缩模型可能通过减少层的核数,降低模型复杂度。
论文采用的一个简单而有效的办法:渐进式压缩。例如以压缩率1/2为例,我们可以先压缩到3/4,对压缩后的模型进行微调,完成后,再压缩到1/2,再微调。保证压缩稳定进行。
这里采用Pruning filters for efficient convnets的方法,对于每个滤波器计算核权重的L1和,降序排序,删除权重值较小的。
Experiment
实验细节:
| 项目 | 设置 |
|---|---|
| 平台 | Caffe,CUDA7.5 cudnnV5,TitanX单卡 |
| 测量推荐时间 | Caffe time,100次取均值 |
| batch size | 16 |
| 学习率 | poly策略,基础学习率为0.01,动量0.9 |
| 迭代次数 | 30K |
| 权重衰减 | 0.0001 |
| 数据增强 | 随机翻转,在0.5到2之间随机放缩 |
ICNet是从PSPNet修改而来,将PSPNet的池化级联改为了求和,将通道4096减少到2048,改变了PSP模型后的卷积核大小,从3×3
3×3改为1×1
1×1,这对结果影响不大,但可以大大节省计算量。
数据集使用的是的Cityscapes,评估标准有mIoU和推断时间.
模型压缩的实验
以PSPNet50为例,直接压缩结果如下表Baseline:
mIoU降低了,但推理时间170ms达不到实时要求。这表明只是模型压缩是达不到有良好分割结果的实时性能。对比ICNet,有类似的分割结果,但速度提升了5倍多。
级联结构的有效性实验
测试级联结构的有效性实验,是通过不同分支的输出对比,如下表:
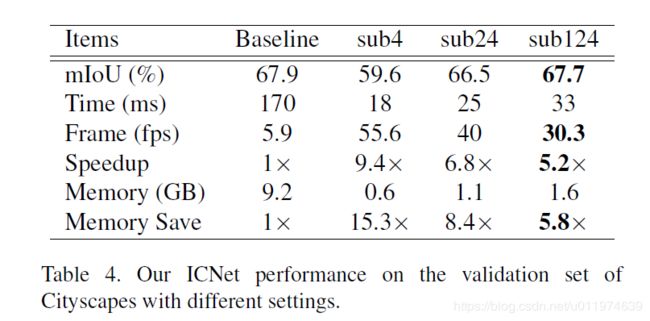
sub4代表只有低分辨率输入的结果,sub24代表前两个分支,sub124全部分支。注意到全部分支的速度很快,并且性能接近PSPNet了,且能保持30fps。而且内存消耗也明显减少了。
视觉比较
下图是输入和输出之间的比较:
可以看到sub4可以捕捉到大部分的语义了、但因为是低分辨率输入,输出很粗糙。无论是sub4还是sub24都或多或少的丢失了细节。
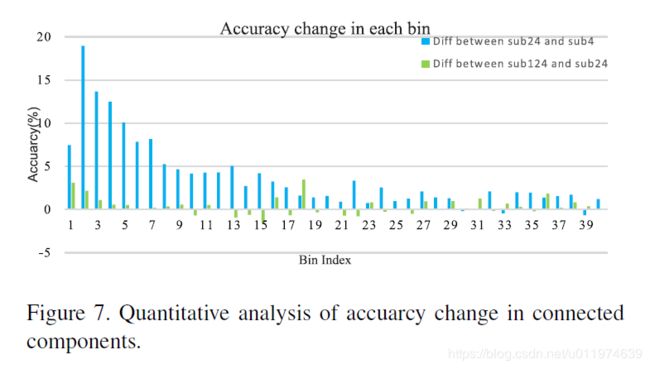
定量分析
进一步确定每个分支的效率增益,基于连通图定量分析(这个实验没看懂~)
Cityscapes上的表现
ICNet训练90K后与其他模型比较:
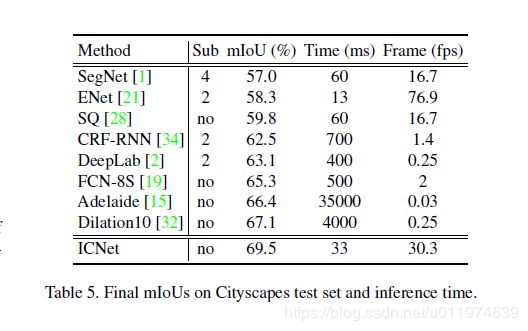
可以看到ICNet的效果不错
Conclusion
论文在PSPNet的基础上改进出一个ICNet。 核心的思想是利用低分辨率的快速获取语义信息,高分辨率的细节信息。将两者相融合搞出一个折中的模型。
代码分析
这里没有直接分析原版的Caffe版本.选择的是一个比较好理解的TensorFlow版本。
代码框架
这个TensorFlow代码比较有意思,用装饰器做了一个链式模型,我们先看基本的装饰器和NetWork基类架构实现。
代码network包含装饰器等定义:
import numpy as np
import tensorflow as tf
slim = tf.contrib.slim
DEFAULT_PADDING = 'VALID'
DEFAULT_DATAFORMAT = 'NHWC'
layer_name = []
BN_param_map = {'scale': 'gamma',
'offset': 'beta',
'variance': 'moving_variance',
'mean': 'moving_mean'}
def layer(op):
'''定义可组合网络层的装饰器。Decorator for composable network layers.'''
def layer_decorated(self, *args, **kwargs):
# 如果没有提供name,则自动配置
name = kwargs.setdefault('name', self.get_unique_name(op.__name__))
# 弄清楚该层的输入
if len(self.terminals) == 0:
raise RuntimeError('No input variables found for layer %s.' % name)
elif len(self.terminals) == 1:
layer_input = self.terminals[0]
else:
layer_input = list(self.terminals)
# 执行对应的操作并输出结果
layer_output = op(self, layer_input, *args, **kwargs)
# Add to layer LUT.
self.layers[name] = layer_output
layer_name.append(name)
# 该层输出是下层的输入
self.feed(layer_output)
# 返回self,用于链式调用
return self
return layer_decorated
class Network(object):
def __init__(self, inputs, trainable=True, is_training=False, num_classes=21):
''' 定义一个NetWork基类 提供必要的方法和层定义 '''
self.inputs = inputs # 模型input节点
self.terminals = [] # 当前存在节点
self.layers = dict(inputs) # Mapping from layer names to layers
# If true, the resulting variables are set as trainable
self.is_training = is_training
self.trainable = trainable
# Switch variable for dropout
self.use_dropout = tf.placeholder_with_default(tf.constant(1.0),
shape=[],
name='use_dropout')
self.setup(is_training, num_classes)
def setup(self, is_training):
'''Construct the network. '''
raise NotImplementedError('Must be implemented by the subclass.')
def load(self, data_path, session, ignore_missing=False):
'''加载模型权重
data_path: np序列文件地址
session: 当前的tensorflow session
ignore_missing: If true, 忽略序列中缺失层
'''
data_dict = np.load(data_path, encoding='latin1').item()
for op_name in data_dict:
with tf.variable_scope(op_name, reuse=True):
for param_name, data in data_dict[op_name].iteritems():
try:
if 'bn' in op_name:
param_name = BN_param_map[param_name]
var = tf.get_variable(param_name)
session.run(var.assign(data))
except ValueError:
if not ignore_missing:
raise
def feed(self, *args):
'''设置一个输入
The arguments can be either layer names or the actual layers.
'''
assert len(args) != 0
self.terminals = []
for fed_layer in args:
if isinstance(fed_layer, str):
try:
fed_layer = self.layers[fed_layer]
except KeyError:
raise KeyError('Unknown layer name fed: %s' % fed_layer)
self.terminals.append(fed_layer)
return self
def get_output(self):
'''获取模型输出.'''
return self.terminals[-1]
def get_unique_name(self, prefix):
'''Returns an index-suffixed unique name for the given prefix.
This is used for auto-generating layer names based on the type-prefix.
'''
ident = sum(t.startswith(prefix) for t, _ in self.layers.items()) + 1
return '%s_%d' % (prefix, ident)
def make_var(self, name, shape):
'''Creates a new TensorFlow variable.'''
return tf.get_variable(name, shape, trainable=self.trainable)
def get_layer_name(self):
return layer_name
def validate_padding(self, padding):
'''判断padding设置是否合法'''
assert padding in ('SAME', 'VALID')
@layer
def zero_padding(self, input, paddings, name):
'''zero padding 层 '''
pad_mat = np.array([[0,0], [paddings, paddings], [paddings, paddings], [0, 0]])
return tf.pad(input, paddings=pad_mat, name=name)
@layer
def conv(self,
input,
k_h,
k_w,
c_o,
s_h,
s_w,
name,
relu=True,
padding=DEFAULT_PADDING,
group=1,
biased=True):
''' conv 层'''
# Verify that the padding is acceptable
self.validate_padding(padding)
# Get the number of channels in the input
c_i = input.get_shape()[-1]
convolve = lambda i, k: tf.nn.conv2d(i, k, [1, s_h, s_w, 1], padding=padding,data_format=DEFAULT_DATAFORMAT)
with tf.variable_scope(name) as scope:
kernel = self.make_var('weights', shape=[k_h, k_w, c_i, c_o])
output = convolve(input, kernel)
if biased:
biases = self.make_var('biases', [c_o])
output = tf.nn.bias_add(output, biases)
if relu:
output = tf.nn.relu(output, name=scope.name)
return output
@layer
def atrous_conv(self,
input,
k_h,
k_w,
c_o,
dilation,
name,
relu=True,
padding=DEFAULT_PADDING,
group=1,
biased=True):
''' 空洞卷积 '''
self.validate_padding(padding)
# Get the number of channels in the input
c_i = input.get_shape()[-1]
convolve = lambda i, k: tf.nn.atrous_conv2d(i, k, dilation, padding=padding)
with tf.variable_scope(name) as scope:
kernel = self.make_var('weights', shape=[k_h, k_w, c_i, c_o])
output = convolve(input, kernel)
if biased:
biases = self.make_var('biases', [c_o])
output = tf.nn.bias_add(output, biases)
if relu:
output = tf.nn.relu(output, name=scope.name)
return output
@layer
def relu(self, input, name):
return tf.nn.relu(input, name=name)
@layer
def max_pool(self, input, k_h, k_w, s_h, s_w, name, padding=DEFAULT_PADDING):
self.validate_padding(padding)
return tf.nn.max_pool(input,
ksize=[1, k_h, k_w, 1],
strides=[1, s_h, s_w, 1],
padding=padding,
name=name,
data_format=DEFAULT_DATAFORMAT)
@layer
def avg_pool(self, input, k_h, k_w, s_h, s_w, name, padding=DEFAULT_PADDING):
self.validate_padding(padding)
output = tf.nn.avg_pool(input,
ksize=[1, k_h, k_w, 1],
strides=[1, s_h, s_w, 1],
padding=padding,
name=name,
data_format=DEFAULT_DATAFORMAT)
return output
@layer
def lrn(self, input, radius, alpha, beta, name, bias=1.0):
return tf.nn.local_response_normalization(input,
depth_radius=radius,
alpha=alpha,
beta=beta,
bias=bias,
name=name)
@layer
def concat(self, inputs, axis, name):
return tf.concat(axis=axis, values=inputs, name=name)
@layer
def add(self, inputs, name):
return tf.add_n(inputs, name=name)
@layer
def fc(self, input, num_out, name, relu=True):
with tf.variable_scope(name) as scope:
input_shape = input.get_shape()
if input_shape.ndims == 4:
# The input is spatial. Vectorize it first.
dim = 1
for d in input_shape[1:].as_list():
dim *= d
feed_in = tf.reshape(input, [-1, dim])
else:
feed_in, dim = (input, input_shape[-1].value)
weights = self.make_var('weights', shape=[dim, num_out])
biases = self.make_var('biases', [num_out])
op = tf.nn.relu_layer if relu else tf.nn.xw_plus_b
fc = op(feed_in, weights, biases, name=scope.name)
return fc
@layer
def softmax(self, input, name):
input_shape = map(lambda v: v.value, input.get_shape())
if len(input_shape) > 2:
# For certain models (like NiN), the singleton spatial dimensions
# need to be explicitly squeezed, since they're not broadcast-able
# in TensorFlow's NHWC ordering (unlike Caffe's NCHW).
if input_shape[1] == 1 and input_shape[2] == 1:
input = tf.squeeze(input, squeeze_dims=[1, 2])
else: return tf.nn.softmax(input, name)
@layer
def batch_normalization(self, input, name, scale_offset=True, relu=False):
"""
# NOTE: Currently, only inference is supported
with tf.variable_scope(name) as scope:
shape = [input.get_shape()[-1]]
if scale_offset:
scale = self.make_var('scale', shape=shape)
offset = self.make_var('offset', shape=shape)
else:
scale, offset = (None, None)
output = tf.nn.batch_normalization(
input,
mean=self.make_var('mean', shape=shape),
variance=self.make_var('variance', shape=shape),
offset=offset,
scale=scale,
# TODO: This is the default Caffe batch norm eps
# Get the actual eps from parameters
variance_epsilon=1e-5,
name=name)
if relu:
output = tf.nn.relu(output)
return output
"""
output = tf.layers.batch_normalization(
input,
momentum=0.95,
epsilon=1e-5,
training=self.is_training,
name=name
)
if relu:
output = tf.nn.relu(output)
return output
@layer
def dropout(self, input, keep_prob, name):
keep = 1 - self.use_dropout + (self.use_dropout * keep_prob)
return tf.nn.dropout(input, keep, name=name)
@layer
def resize_bilinear(self, input, size, name):
'''双线性插值的放缩'''
return tf.image.resize_bilinear(input, size=size, align_corners=True, name=name)
@layer
def interp(self, input, factor, name):
'''指定大小输入'''
ori_h, ori_w = input.get_shape().as_list()[1:3]
resize_shape = [(int)(ori_h * factor), (int)(ori_w * factor)]
return tf.image.resize_bilinear(input, size=resize_shape, align_corners=True, name=name)
ICNet构建
有了上面的铺垫,再看model.py文件中关于ICNet_BN的定义。该实现没有做模型压缩的操作,所以在实现的时候只做了一半的kernel.
注意ICNet_BN类需要继承Network类,重写了setup方法.
中分支结构
class ICNet_BN(Network):
def setup(self, is_training, num_classes):
(self.feed('data') # feed层
.interp(factor=0.5, name='data_sub2')
.conv(3, 3, 32, 2, 2, biased=False, padding='SAME', relu=False, name='conv1_1_3x3_s2')
.batch_normalization(relu=True, name='conv1_1_3x3_s2_bn')
.conv(3, 3, 32, 1, 1, biased=False, padding='SAME', relu=False, name='conv1_2_3x3')
.batch_normalization(relu=True, name='conv1_2_3x3_bn')
.conv(3, 3, 64, 1, 1, biased=False, padding='SAME', relu=False, name='conv1_3_3x3')
.batch_normalization(relu=True, name='conv1_3_3x3_bn')
.max_pool(3, 3, 2, 2, name='pool1_3x3_s2')
.conv(1, 1, 128, 1, 1, biased=False, relu=False, name='conv2_1_1x1_proj')
.batch_normalization(relu=False, name='conv2_1_1x1_proj_bn'))
(self.feed('pool1_3x3_s2')
.conv(1, 1, 32, 1, 1, biased=False, relu=False, name='conv2_1_1x1_reduce')
.batch_normalization(relu=True, name='conv2_1_1x1_reduce_bn')
.zero_padding(paddings=1, name='padding1')
.conv(3, 3, 32, 1, 1, biased=False, relu=False, name='conv2_1_3x3')
.batch_normalization(relu=True, name='conv2_1_3x3_bn')
.conv(1, 1, 128, 1, 1, biased=False, relu=False, name='conv2_1_1x1_increase')
.batch_normalization(relu=False, name='conv2_1_1x1_increase_bn'))
(self.feed('conv2_1_1x1_proj_bn',
'conv2_1_1x1_increase_bn')
.add(name='conv2_1')
.relu(name='conv2_1/relu')
.conv(1, 1, 32, 1, 1, biased=False, relu=False, name='conv2_2_1x1_reduce')
.batch_normalization(relu=True, name='conv2_2_1x1_reduce_bn')
.zero_padding(paddings=1, name='padding2')
.conv(3, 3, 32, 1, 1, biased=False, relu=False, name='conv2_2_3x3')
.batch_normalization(relu=True, name='conv2_2_3x3_bn')
.conv(1, 1, 128, 1, 1, biased=False, relu=False, name='conv2_2_1x1_increase')
.batch_normalization(relu=False, name='conv2_2_1x1_increase_bn'))
(self.feed('conv2_1/relu',
'conv2_2_1x1_increase_bn')
.add(name='conv2_2')
.relu(name='conv2_2/relu')
.conv(1, 1, 32, 1, 1, biased=False, relu=False, name='conv2_3_1x1_reduce')
.batch_normalization(relu=True, name='conv2_3_1x1_reduce_bn')
.zero_padding(paddings=1, name='padding3')
.conv(3, 3, 32, 1, 1, biased=False, relu=False, name='conv2_3_3x3')
.batch_normalization(relu=True, name='conv2_3_3x3_bn')
.conv(1, 1, 128, 1, 1, biased=False, relu=False, name='conv2_3_1x1_increase')
.batch_normalization(relu=False, name='conv2_3_1x1_increase_bn'))
(self.feed('conv2_2/relu',
'conv2_3_1x1_increase_bn')
.add(name='conv2_3')
.relu(name='conv2_3/relu')
.conv(1, 1, 256, 2, 2, biased=False, relu=False, name='conv3_1_1x1_proj')
.batch_normalization(relu=False, name='conv3_1_1x1_proj_bn'))
(self.feed('conv2_3/relu')
.conv(1, 1, 64, 2, 2, biased=False, relu=False, name='conv3_1_1x1_reduce')
.batch_normalization(relu=True, name='conv3_1_1x1_reduce_bn')
.zero_padding(paddings=1, name='padding4')
.conv(3, 3, 64, 1, 1, biased=False, relu=False, name='conv3_1_3x3')
.batch_normalization(relu=True, name='conv3_1_3x3_bn')
.conv(1, 1, 256, 1, 1, biased=False, relu=False, name='conv3_1_1x1_increase')
.batch_normalization(relu=False, name='conv3_1_1x1_increase_bn'))
(self.feed('conv3_1_1x1_proj_bn',
'conv3_1_1x1_increase_bn')
.add(name='conv3_1')
.relu(name='conv3_1/relu')
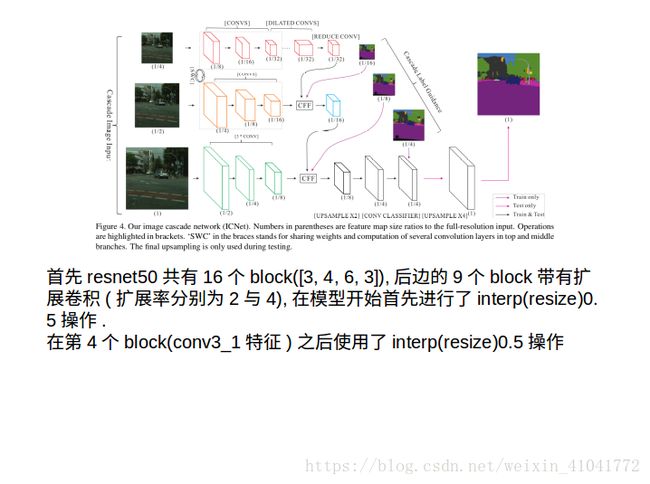
.interp(factor=0.5, name='conv3_1_sub4')
.conv(1, 1, 64, 1, 1, biased=False, relu=False, name='conv3_2_1x1_reduce')
.batch_normalization(relu=True, name='conv3_2_1x1_reduce_bn')
.zero_padding(paddings=1, name='padding5')
.conv(3, 3, 64, 1, 1, biased=False, relu=False, name='conv3_2_3x3')
.batch_normalization(relu=True, name='conv3_2_3x3_bn')
.conv(1, 1, 256, 1, 1, biased=False, relu=False, name='conv3_2_1x1_increase')
.batch_normalization(relu=False, name='conv3_2_1x1_increase_bn'))
- 1
基础层有两个常见的单元:

可以看到主分支的前两个卷积都降通道数了,这可以保持分割结果的同时大幅度减少计算量。
普通的残差模块: 在后面空洞卷积后替换主分支中间的卷积.
特殊的残差模块功能有:增加通道,降采样(配合增加通道使用),带空洞卷积等。
上面一段代码示意图如下:
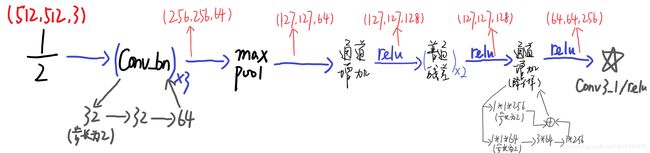
总结一下,假设原输入为(1024,1024,3)
(1024,1024,3)
- 先将图片长宽resize到原本的1/2大小,即(512,512,3)
- (512,512,3)
- (Conv_bn)3
- (Conv_bn)3,卷积降采样–>卷积–>卷积,前段提取特征得到(256,256,64)
- (256,256,64)
- 最大池化得到(127,127,64)
- (127,127,64)
- 使用通道增加模块得到(127,127,128)
- (127,127,128)
- 做两个普通残差模块还是(127,127,128)
- (127,127,128)
- 做了一个降采样通道增加模块,得到Conv3_1/relu
- Conv3_1/relu的shape为(64,64,256)
- (64,64,256)
这里对应的ICNet的示意图:
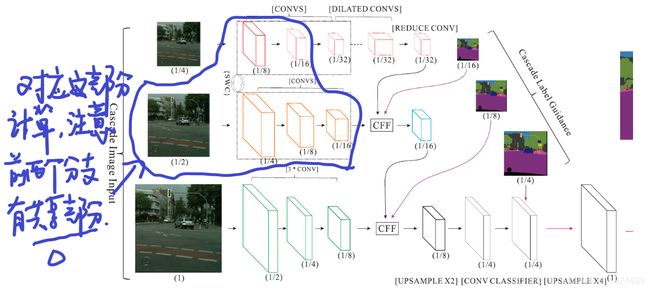
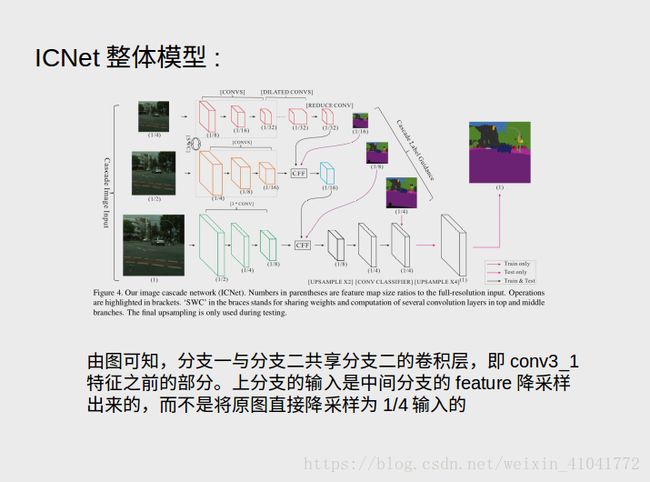
可以看到在ICNet上,已经实现了中间分支的CONVS部分了,因为上分支和中间分支在前面的卷积计算是共享的,下面就是实现上分支的剩下部分。上分支完整结构
需要注意的是上分支的输入是中间分支的feature降采样出来的,而不是将原图直接降采样为1/4输入的。这部分可以参考paper放出来的代码icnet_cityscapes_bnnomerge.prototxt.
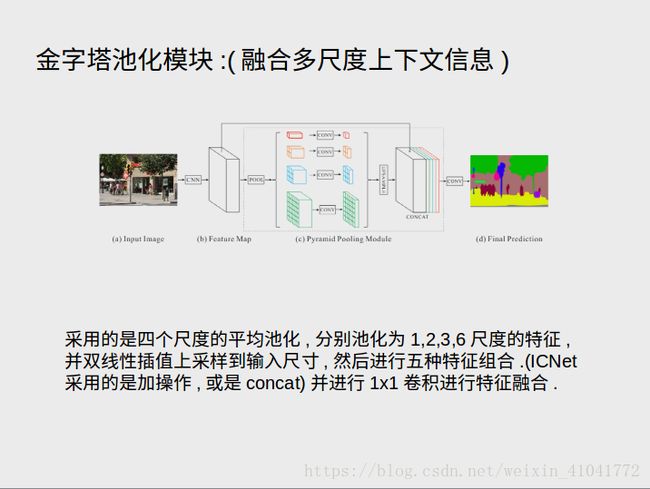
# 这里是截取的代码,与上一段代码有部分重复 (self.feed('conv3_1_1x1_proj_bn', 'conv3_1_1x1_increase_bn') .add(name='conv3_1') .relu(name='conv3_1/relu') .interp(factor=0.5, name='conv3_1_sub4') # 这里是在feature的基础上直接降采样 .conv(1, 1, 64, 1, 1, biased=False, relu=False, name='conv3_2_1x1_reduce') .batch_normalization(relu=True, name='conv3_2_1x1_reduce_bn') .zero_padding(paddings=1, name='padding5') .conv(3, 3, 64, 1, 1, biased=False, relu=False, name='conv3_2_3x3') .batch_normalization(relu=True, name='conv3_2_3x3_bn') .conv(1, 1, 256, 1, 1, biased=False, relu=False, name='conv3_2_1x1_increase') .batch_normalization(relu=False, name='conv3_2_1x1_increase_bn')) (self.feed('conv3_1_sub4', 'conv3_2_1x1_increase') .add(name='conv3_2') .relu(name='conv3_2/relu') .conv(1, 1, 64, 1, 1, biased=False, relu=False, name='conv3_3_1x1_reduce') .batch_normalization(relu=True, name='conv3_3_1x1_reduce_bn') .zero_padding(paddings=1, name='padding6') .conv(3, 3, 64, 1, 1, biased=False, relu=False, name='conv3_3_3x3') .batch_normalization(relu=True, name='conv3_3_3x3_bn') .conv(1, 1, 256, 1, 1, biased=False, relu=False, name='conv3_3_1x1_increase') .batch_normalization(relu=False, name='conv3_3_1x1_increase_bn')) (self.feed('conv3_2/relu', 'conv3_3_1x1_increase_bn') .add(name='conv3_3') .relu(name='conv3_3/relu') .conv(1, 1, 64, 1, 1, biased=False, relu=False, name='conv3_4_1x1_reduce') .batch_normalization(relu=True, name='conv3_4_1x1_reduce_bn') .zero_padding(paddings=1, name='padding7') .conv(3, 3, 64, 1, 1, biased=False, relu=False, name='conv3_4_3x3') .batch_normalization(relu=True, name='conv3_4_3x3_bn') .conv(1, 1, 256, 1, 1, biased=False, relu=False, name='conv3_4_1x1_increase') .batch_normalization(relu=False, name='conv3_4_1x1_increase_bn')) (self.feed('conv3_3/relu', 'conv3_4_1x1_increase_bn') .add(name='conv3_4') .relu(name='conv3_4/relu') .conv(1, 1, 512, 1, 1, biased=False, relu=False, name='conv4_1_1x1_proj') .batch_normalization(relu=False, name='conv4_1_1x1_proj_bn')) (self.feed('conv3_4/relu') .conv(1, 1, 128, 1, 1, biased=False, relu=False, name='conv4_1_1x1_reduce') .batch_normalization(relu=True, name='conv4_1_1x1_reduce_bn') .zero_padding(paddings=2, name='padding8') .atrous_conv(3, 3, 128, 2, biased=False, relu=False, name='conv4_1_3x3') .batch_normalization(relu=True, name='conv4_1_3x3_bn') .conv(1, 1, 512, 1, 1, biased=False, relu=False, name='conv4_1_1x1_increase') .batch_normalization(relu=False, name='conv4_1_1x1_increase_bn')) (self.feed('conv4_1_1x1_proj_bn', 'conv4_1_1x1_increase_bn') .add(name='conv4_1') .relu(name='conv4_1/relu') .conv(1, 1, 128, 1, 1, biased=False, relu=False, name='conv4_2_1x1_reduce') .batch_normalization(relu=True, name='conv4_2_1x1_reduce_bn') .zero_padding(paddings=2, name='padding9') .atrous_conv(3, 3, 128, 2, biased=False, relu=False, name='conv4_2_3x3') .batch_normalization(relu=True, name='conv4_2_3x3_bn') .conv(1, 1, 512, 1, 1, biased=False, relu=False, name='conv4_2_1x1_increase') .batch_normalization(relu=False, name='conv4_2_1x1_increase_bn')) (self.feed('conv4_1/relu', 'conv4_2_1x1_increase_bn') .add(name='conv4_2') .relu(name='conv4_2/relu') .conv(1, 1, 128, 1, 1, biased=False, relu=False, name='conv4_3_1x1_reduce') .batch_normalization(relu=True, name='conv4_3_1x1_reduce_bn') .zero_padding(paddings=2, name='padding10') .atrous_conv(3, 3, 128, 2, biased=False, relu=False, name='conv4_3_3x3') .batch_normalization(relu=True, name='conv4_3_3x3_bn') .conv(1, 1, 512, 1, 1, biased=False, relu=False, name='conv4_3_1x1_increase') .batch_normalization(relu=False, name='conv4_3_1x1_increase_bn')) (self.feed('conv4_2/relu', 'conv4_3_1x1_increase') .add(name='conv4_3') .relu(name='conv4_3/relu') .conv(1, 1, 128, 1, 1, biased=False, relu=False, name='conv4_4_1x1_reduce') .batch_normalization(relu=True, name='conv4_4_1x1_reduce_bn') .zero_padding(paddings=2, name='padding11') .atrous_conv(3, 3, 128, 2, biased=False, relu=False, name='conv4_4_3x3') .batch_normalization(relu=True, name='conv4_4_3x3_bn') .conv(1, 1, 512, 1, 1, biased=False, relu=False, name='conv4_4_1x1_increase') .batch_normalization(relu=False, name='conv4_4_1x1_increase_bn')) (self.feed('conv4_3/relu', 'conv4_4_1x1_increase_bn') .add(name='conv4_4') .relu(name='conv4_4/relu') .conv(1, 1, 128, 1, 1, biased=False, relu=False, name='conv4_5_1x1_reduce') .batch_normalization(relu=True, name='conv4_5_1x1_reduce_bn') .zero_padding(paddings=2, name='padding12') .atrous_conv(3, 3, 128, 2, biased=False, relu=False, name='conv4_5_3x3') .batch_normalization(relu=True, name='conv4_5_3x3_bn') .conv(1, 1, 512, 1, 1, biased=False, relu=False, name='conv4_5_1x1_increase') .batch_normalization(relu=False, name='conv4_5_1x1_increase_bn')) (self.feed('conv4_4/relu', 'conv4_5_1x1_increase_bn') .add(name='conv4_5') .relu(name='conv4_5/relu') .conv(1, 1, 128, 1, 1, biased=False, relu=False, name='conv4_6_1x1_reduce') .batch_normalization(relu=True, name='conv4_6_1x1_reduce_bn') .zero_padding(paddings=2, name='padding13') .atrous_conv(3, 3, 128, 2, biased=False, relu=False, name='conv4_6_3x3') .batch_normalization(relu=True, name='conv4_6_3x3_bn') .conv(1, 1, 512, 1, 1, biased=False, relu=False, name='conv4_6_1x1_increase') .batch_normalization(relu=False, name='conv4_6_1x1_increase_bn')) (self.feed('conv4_5/relu', 'conv4_6_1x1_increase_bn') .add(name='conv4_6') .relu(name='conv4_6/relu') .conv(1, 1, 1024, 1, 1, biased=False, relu=False, name='conv5_1_1x1_proj') .batch_normalization(relu=False, name='conv5_1_1x1_proj_bn')) (self.feed('conv4_6/relu') .conv(1, 1, 256, 1, 1, biased=False, relu=False, name='conv5_1_1x1_reduce') .batch_normalization(relu=True, name='conv5_1_1x1_reduce_bn') .zero_padding(paddings=4, name='padding14') .atrous_conv(3, 3, 256, 4, biased=False, relu=False, name='conv5_1_3x3') .batch_normalization(relu=True, name='conv5_1_3x3_bn') .conv(1, 1, 1024, 1, 1, biased=False, relu=False, name='conv5_1_1x1_increase') .batch_normalization(relu=False, name='conv5_1_1x1_increase_bn')) (self.feed('conv5_1_1x1_proj_bn', 'conv5_1_1x1_increase_bn') .add(name='conv5_1') .relu(name='conv5_1/relu') .conv(1, 1, 256, 1, 1, biased=False, relu=False, name='conv5_2_1x1_reduce') .batch_normalization(relu=True, name='conv5_2_1x1_reduce_bn') .zero_padding(paddings=4, name='padding15') .atrous_conv(3, 3, 256, 4, biased=False, relu=False, name='conv5_2_3x3') .batch_normalization(relu=True, name='conv5_2_3x3_bn') .conv(1, 1, 1024, 1, 1, biased=False, relu=False, name='conv5_2_1x1_increase') .batch_normalization(relu=False, name='conv5_2_1x1_increase_bn')) (self.feed('conv5_1/relu', 'conv5_2_1x1_increase_bn') .add(name='conv5_2') .relu(name='conv5_2/relu') .conv(1, 1, 256, 1, 1, biased=False, relu=False, name='conv5_3_1x1_reduce') .batch_normalization(relu=True, name='conv5_3_1x1_reduce_bn') .zero_padding(paddings=4, name='padding16') .atrous_conv(3, 3, 256, 4, biased=False, relu=False, name='conv5_3_3x3') .batch_normalization(relu=True, name='conv5_3_3x3_bn') .conv(1, 1, 1024, 1, 1, biased=False, relu=False, name='conv5_3_1x1_increase') .batch_normalization(relu=False, name='conv5_3_1x1_increase_bn')) (self.feed('conv5_2/relu', 'conv5_3_1x1_increase_bn') .add(name='conv5_3') .relu(name='conv5_3/relu')) shape = self.layers['conv5_3/relu'].get_shape().as_list()[1:3] h, w = shape (self.feed('conv5_3/relu') .avg_pool(h, w, h, w, name='conv5_3_pool1') .resize_bilinear(shape, name='conv5_3_pool1_interp')) (self.feed('conv5_3/relu') .avg_pool(h/2, w/2, h/2, w/2, name='conv5_3_pool2') .resize_bilinear(shape, name='conv5_3_pool2_interp')) (self.feed('conv5_3/relu') .avg_pool(h/3, w/3, h/3, w/3, name='conv5_3_pool3') .resize_bilinear(shape, name='conv5_3_pool3_interp')) (self.feed('conv5_3/relu') .avg_pool(h/4, w/4, h/4, w/4, name='conv5_3_pool6') .resize_bilinear(shape, name='conv5_3_pool6_interp')) (self.feed('conv5_3/relu', 'conv5_3_pool6_interp', 'conv5_3_pool3_interp', 'conv5_3_pool2_interp', 'conv5_3_pool1_interp') .add(name='conv5_3_sum') .conv(1, 1, 256, 1, 1, biased=False, relu=False, name='conv5_4_k1') .batch_normalization(relu=True, name='conv5_4_k1_bn') .interp(factor=2.0, name='conv5_4_interp') .zero_padding(paddings=2, name='padding17') .atrous_conv(3, 3, 128, 2, biased=False, relu=False, name='conv_sub4') .batch_normalization(relu=False, name='conv_sub4_bn'))代码示意图如下:
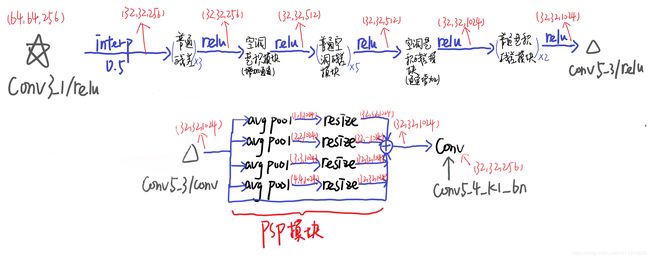
总结一下,经过中间分支的输出即Conv3_1/relu
Conv3_1/relu部分,大小为(64,64,256)(64,64,256)
- 先将feature长宽resize到原本的1/2大小,即(32,32,256)
- (32,32,256)
- 做三个普通的残差模块,依旧是(32,32,256)
- (32,32,256)
- 使用通道增加的空洞卷积模块,输出为(32,32,512)
- (32,32,512)
- 使用五个普通的空洞残差模块(即普通残差模块主分支的卷积换为空洞卷积),输出为(32,32,512)
- (32,32,512)
- 使用通道增加的空洞卷积模块,输出为(32,32,1024)
- (32,32,1024)
- 使用两个普通的空洞残差模块,得到Conv5_3/relu
- Conv5_3/relu,大小为(32,32,1024)
- (32,32,1024)
到这里,上分支的空洞卷积部分结束了,接下来就做通道降维,即上图下面的部分:
-
将Conv5_3/relu
Conv5_3/relu送入PSP模块
- 即送入4个平均池化层,输出为(1,1,1024),(2,2,1024),(3,3,1024),(6,6,1024)
- (1,1,1024),(2,2,1024),(3,3,1024),(6,6,1024)
- 再通过双线性插值将4个池化输出放缩回(32,32,1024)
- (32,32,1024)
- 将4个放缩输出(32,32,1024)
- (32,32,1024)与Conv5_3/reluConv5_3/relu做像素加操作,得到(32,32,1024)
-
- (32,32,1024)
-
再卷积将通道降下来,即Conv5_4_k1_bn
- Conv5_4_k1_bn,大小为(32,32,256)
-
(32,32,256)
这里对应的ICNet的示意图:
可以看到在ICNet上,上分支的提取部分已经实现了.下面就是实现CFF和输出结果了。
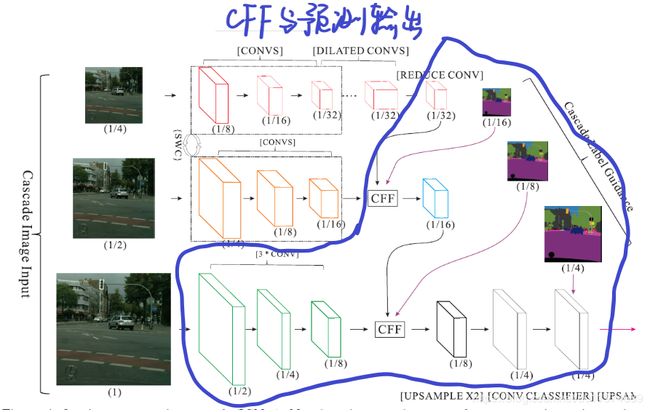
CFF单元和输出
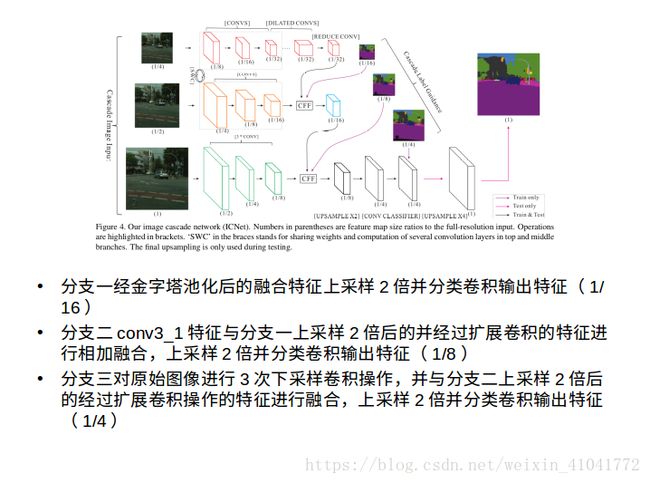
# 截取代码,与上面代码有重复 (self.feed('conv5_3/relu', 'conv5_3_pool6_interp', 'conv5_3_pool3_interp', 'conv5_3_pool2_interp', 'conv5_3_pool1_interp') .add(name='conv5_3_sum') .conv(1, 1, 256, 1, 1, biased=False, relu=False, name='conv5_4_k1') .batch_normalization(relu=True, name='conv5_4_k1_bn') .interp(factor=2.0, name='conv5_4_interp') .zero_padding(paddings=2, name='padding17') .atrous_conv(3, 3, 128, 2, biased=False, relu=False, name='conv_sub4') .batch_normalization(relu=False, name='conv_sub4_bn')) (self.feed('conv3_1/relu') .conv(1, 1, 128, 1, 1, biased=False, relu=False, name='conv3_1_sub2_proj') .batch_normalization(relu=False, name='conv3_1_sub2_proj_bn')) (self.feed('conv_sub4_bn', 'conv3_1_sub2_proj_bn') .add(name='sub24_sum') .relu(name='sub24_sum/relu') .interp(factor=2.0, name='sub24_sum_interp') .zero_padding(paddings=2, name='padding18') .atrous_conv(3, 3, 128, 2, biased=False, relu=False, name='conv_sub2') .batch_normalization(relu=False, name='conv_sub2_bn')) (self.feed('data') .conv(3, 3, 32, 2, 2, biased=False, padding='SAME', relu=False, name='conv1_sub1') .batch_normalization(relu=True, name='conv1_sub1_bn') .conv(3, 3, 32, 2, 2, biased=False, padding='SAME', relu=False, name='conv2_sub1') .batch_normalization(relu=True, name='conv2_sub1_bn') .conv(3, 3, 64, 2, 2, biased=False, padding='SAME', relu=False, name='conv3_sub1') .batch_normalization(relu=True, name='conv3_sub1_bn') .conv(1, 1, 128, 1, 1, biased=False, relu=False, name='conv3_sub1_proj') .batch_normalization(relu=False, name='conv3_sub1_proj_bn')) (self.feed('conv_sub2_bn', 'conv3_sub1_proj_bn') .add(name='sub12_sum') .relu(name='sub12_sum/relu') .interp(factor=2.0, name='sub12_sum_interp') .conv(1, 1, num_classes, 1, 1, biased=True, relu=False, name='conv6_cls')) (self.feed('conv5_4_interp') .conv(1, 1, num_classes, 1, 1, biased=True, relu=False, name='sub4_out')) (self.feed('sub24_sum_interp') .conv(1, 1, num_classes, 1, 1, biased=True, relu=False, name='sub24_out'))代码示意图如下:
总结一下,经过PSP模块的输出即Conv5_4_k1_bn
Conv5_4_k1_bn,大小为(32,32,256)(32,32,256)
- 先做第一个CFF模块,完成上分支到中分支的特征融合
- 先上采样2倍到(64,64,256)
-
- (64,64,128)
- 将Conv3_1/relu
- Conv3_1/relu做卷积通道降维到(64,64,128)(64,64,128),与上面输出作像素加,结果加relurelu得(64,64,128)
- (64,64,128)
- 再上采样的基础上,再作卷积输出得到上分支的预测结果,即sub4_out
- sub4_out对应1/16标签。输出为(64,64,num_class)
-
- (64,64,num_class)
- 再做第二个CFF模块,完成中分支到下分支的特征融合
- 先上采样2倍到(128,128,128)
- (128,128,128),经过一个空洞卷积得到(128,128,128)
- (128,128,128)
- 将输入图片做4次卷积,分别是降采样卷积–>降采样卷积–>降采样卷积–>卷积,得到(128,128,128)
- (128,128,128),与上面输出作像素加,结果加relurelu得(128,128,128)
- (128,128,128)
- 再上采样的基础上,再作卷积输出得到中分支的预测结果,即sub24_out
- sub24_out对应1/8标签。输出为(128,128,num_class)
-
- (128,128,num_class)
- 做上采样2倍到(256,256,128)
- (256,256,128),作卷积输出得到下分支的预测结果,即Conv6_clsConv6_cls对应1/4标签。输出为(256,256,num_class)
- (256,256,num_class)
到这里,ICNet基本上算是定义完成了
对应CFF模块结构:
这里对应的ICNet的示意图:
训练代码
上面说完了ICNet的模型构建,下面看一下ICNet的损失函数和最终的输出,代码见train.py.
主要是构建多分支loss,即论文中公式为L=λ1L1+λ2L2+λ3L3
L=λ1L1+λ2L2+λ3L3.
其中λ1=0.16,λ2=0.4,λ3=1λ1=0.16,λ2=0.4,λ3=1.
这里主要看main函数的代码:
def main(): """Create the model and start the training.""" args = get_arguments() h, w = map(int, args.input_size.split(',')) input_size = (h, w) coord = tf.train.Coordinator() # 获取多线程管理器 with tf.name_scope("create_inputs"): reader = ImageReader( ' ', args.data_list, input_size, args.random_scale, args.random_mirror, args.ignore_label, IMG_MEAN, coord) image_batch, label_batch = reader.dequeue(args.batch_size) # 构建模型 net = ICNet_BN({'data': image_batch}, is_training=True, num_classes=args.num_classes) # 获取上中下分支的输出 sub4_out = net.layers['sub4_out'] sub24_out = net.layers['sub24_out'] sub124_out = net.layers['conv6_cls'] restore_var = tf.global_variables() all_trainable = [v for v in tf.trainable_variables() if ('beta' not in v.name and 'gamma' not in v.name) or args.train_beta_gamma] loss_sub4 = create_loss(sub4_out, label_batch, args.num_classes, args.ignore_label) loss_sub24 = create_loss(sub24_out, label_batch, args.num_classes, args.ignore_label) loss_sub124 = create_loss(sub124_out, label_batch, args.num_classes, args.ignore_label) l2_losses = [args.weight_decay * tf.nn.l2_loss(v) for v in tf.trainable_variables() if 'weights' in v.name] # 构建带L2正则的多分支loss reduced_loss = LAMBDA1 * loss_sub4 + LAMBDA2 * loss_sub24 + LAMBDA3 * loss_sub124 + tf.add_n(l2_losses) # Using Poly learning rate policy base_lr = tf.constant(args.learning_rate) step_ph = tf.placeholder(dtype=tf.float32, shape=()) learning_rate = tf.scalar_mul(base_lr, tf.pow((1 - step_ph / args.num_steps), args.power)) # Gets moving_mean and moving_variance update operations from tf.GraphKeys.UPDATE_OPS if args.update_mean_var == False: update_ops = None else: update_ops = tf.get_collection(tf.GraphKeys.UPDATE_OPS) with tf.control_dependencies(update_ops): opt_conv = tf.train.MomentumOptimizer(learning_rate, args.momentum) grads = tf.gradients(reduced_loss, all_trainable) train_op = opt_conv.apply_gradients(zip(grads, all_trainable)) # Set up tf session and initialize variables. config = tf.ConfigProto() config.gpu_options.allow_growth = True sess = tf.Session(config=config) init = tf.global_variables_initializer() sess.run(init) # Saver for storing checkpoints of the model. saver = tf.train.Saver(var_list=tf.global_variables(), max_to_keep=5) ckpt = tf.train.get_checkpoint_state(args.snapshot_dir) if ckpt and ckpt.model_checkpoint_path: loader = tf.train.Saver(var_list=restore_var) load_step = int(os.path.basename(ckpt.model_checkpoint_path).split('-')[1]) load(loader, sess, ckpt.model_checkpoint_path) else: print('Restore from pre-trained model...') net.load(args.restore_from, sess) # Start queue threads. threads = tf.train.start_queue_runners(coord=coord, sess=sess) # Iterate over training steps. for step in range(args.num_steps): start_time = time.time() feed_dict = {step_ph: step} if step % args.save_pred_every == 0: loss_value, loss1, loss2, loss3, _ = sess.run([reduced_loss, loss_sub4, loss_sub24, loss_sub124, train_op], feed_dict=feed_dict) save(saver, sess, args.snapshot_dir, step) else: loss_value, loss1, loss2, loss3, _ = sess.run([reduced_loss, loss_sub4, loss_sub24, loss_sub124, train_op], feed_dict=feed_dict) duration = time.time() - start_time print('step {:d} \t total loss = {:.3f}, sub4 = {:.3f}, sub24 = {:.3f}, sub124 = {:.3f} ({:.3f} sec/step)'.format(step, loss_value, loss1, loss2, loss3, duration)) coord.request_stop() coord.join(threads)测试代码
上面说完了ICNet的模型训练,下面看一下ICNet的推断处理,代码见inference.py.
这里和原论文一致,处理的比较简单,参考paper给的代码icnet_cityscapes_bnnomerge.prototxt后面.
**将Conv6_cls
Conv6_cls的结果取出,直接放缩到预测大小。**看main函数的代码:
def main(): args = get_arguments() img, filename = load_img(args.img_path) shape = img.shape[0:2] x = tf.placeholder(dtype=tf.float32, shape=img.shape) img_tf = preprocess(x) img_tf, n_shape = check_input(img_tf) # Create network. if args.model[-2:] == 'bn': net = ICNet_BN({'data': img_tf}, num_classes=num_classes) elif args.model == 'others': net = ICNet_BN({'data': img_tf}, num_classes=num_classes) else: net = ICNet({'data': img_tf}, num_classes=num_classes) # 取出下分支的预测结果 raw_output = net.layers['conv6_cls'] # 预测,直接双线性放缩到指定预测大小 完事 raw_output_up = tf.image.resize_bilinear(raw_output, size=n_shape, align_corners=True) raw_output_up = tf.image.crop_to_bounding_box(raw_output_up, 0, 0, shape[0], shape[1]) raw_output_up = tf.argmax(raw_output_up, dimension=3) pred = decode_labels(raw_output_up, shape, num_classes) # Init tf Session config = tf.ConfigProto() config.gpu_options.allow_growth = True sess = tf.Session(config=config) init = tf.global_variables_initializer() sess.run(init) restore_var = tf.global_variables() if args.model == 'train': print('Restore from train30k model...') net.load(model_train30k, sess) elif args.model == 'trainval': print('Restore from trainval90k model...') net.load(model_trainval90k, sess) elif args.model == 'train_bn': print('Restore from train30k bnnomerge model...') net.load(model_train30k_bn, sess) elif args.model == 'trainval_bn': print('Restore from trainval90k bnnomerge model...') net.load(model_trainval90k_bn, sess) else: ckpt = tf.train.get_checkpoint_state(snapshot_dir) if ckpt and ckpt.model_checkpoint_path: loader = tf.train.Saver(var_list=restore_var) load_step = int(os.path.basename(ckpt.model_checkpoint_path).split('-')[1]) load(loader, sess, ckpt.model_checkpoint_path) preds = sess.run(pred, feed_dict={x: img}) if not os.path.exists(args.save_dir): os.makedirs(args.save_dir) misc.imsave(args.save_dir + filename, preds[0])
ICNet for Real-Time Semantic Segmentation on High-Resolution Images
代码地址:https://github.com/hszhao/ICNet
论文地址:https://arxiv.org/abs/1704.08545
1. Introduction
本文的贡献是利用低分辨率图像的处理效率和高分辨率图像的高推断质量,并提出图像级联框架来逐步细化分段预测。这个想法是首先让低分辨率图像通过完整的语义感知网络来获得粗略的预测图。然后提出的级联融合单元引入中高分辨率图像特征,并逐步改进粗略语义映射。
- ·提出了图像级联网络(ICNet),该网络利用低分辨率的语义信息以及高分辨率图像的细节。
- ICNet实现了5倍以上的推理加速,并将内存消耗减少了5倍以上。
- 提出的快速语义分割系统可以以30.3 fps的速度以1024×2048的分辨率运行,同时实现高质量的结果。
2. Related Work
Fast Semantic Segmentation
快速语义分割在对象检测中,速度成为系统设计中的一个重要因素。近来 Yolo 和SSD 大大改善了它。相反,在语义分割中研究高推断速度的研究刚刚开始。 SegNet 放弃一些层来减少层参数,ENet是一个轻量级的网络。这些方法大大提高了效率。但准确性令人担忧。
Video Segmentation Architectures
最近的Clockwork 给出了稳定的视频输入,重用了特征图。深层特征流是基于小规模光流网络将特征从关键帧传播到其他特征流。我们注意到当一个高精度的快速图像语义分割框架出现时,视频分割也将受益。
本文的工作为快速的语义分割提供了分层结构。它本质上与 Refinenet中的方法不同,后者侧重于在单个正向通道中融合来自不同层的特征以提高性能。相反,我们的图像级联网络采用级联图像作为输入来加速推理并构建实时分割系统。
3. Time Analysis
3.1. Time Budget
除了图像分辨率,网络的宽度和卷积核数量也影响着运行时间,比如在stage4和stage5特征图的空间分辨率一样,但是stage5 的运行时间是stage4的4倍,因为stage5的卷积核数量是stage4的两倍。
3.2 Intutive SpeedUp
输入下采样:图像分辨率是影响速度的最关键因素,因为以上分析显示,与全分辨率图像相比,半分辨率图像仅使用四分之一时间。一种简单的方法是将小分辨率图像用作输入,我们测试比例为1/2和1/4的下采样图像,并将生成的图像输入基于FCN的框架,如PSPNet。获得预测后,我们直接将其上采样到原始大小。
特征下采样: 除了直接对输入图像进行降采样以外,另一个直接的选择是在推理过程中按较大的比例缩小功能图。 FCN 对其进行了32倍取样,DeepLab 进行了8倍下采样。我们使用1:8,1:16和1:32的下采样比测试PSPNet50。较小的特征映射可以以牺牲预测准确度为代价产生更快的推断。丢失的信息同样包含在低层次的信息中。另外,考虑到即使使用1:32比例的最小特征图,系统在推断中仍然需要大约131ms。实时分割的目标仍然存在差距。
模型压缩: 对于每个滤波器,首先计算滤波核权重weights的L1的和;然后,对L1和进行降序排序,仅保留前k个更有意义的值.试验对比如表2所示:

4. Our Image Cascade Network
4.1. Main structures and Branches
低分辨率
低分辨率所提出的框架如图所示。缩放1的输入全分辨率图像在缩放1/2和1/4的缩放后生成两个较低分辨率的图像。这些级联图像分三路输入我们的ICNet。对于最低分辨率输入,它通过顶级分支,这是一个基于FCN的PSPNet架构。由于输入尺寸仅为原始尺寸的四分之一,因此卷积层相应地缩小了1/8的比例尺特征贴图,并且产生了原始空间尺寸的1/32。然后使用几个膨胀的卷积层来放大接收场而不下采样空间尺寸,输出具有原始尺寸1/32尺寸的特征图。
中分辨率
对于1/2尺寸的中分辨率图像,它在第二个分支中处理。通过几个降采样率为8的卷积层,输出特征图的大小为原始图的1/16。为了将1/16大小的特征图与顶部分支中的1/32大小的特征图融合,我们提出了一个将在本文后面讨论的级联特征融合(CFF)单元。这种融合产生了具有原始分辨率1/16的组合特征映射。值得注意的是,卷积参数可以在1/4和1/2分辨率输入之间共享,从而节省了计算量并减少了参数数量。
高分辨率
对于高分辨率图像,与第二个分支中的操作类似,它由几个卷积层处理,降采样率为8,得到1 / 8尺寸特征图。由于中分辨率图像已经恢复了低分辨率图像中缺失的大部分语义上有意义的细节,因此我们可以安全地限制处理高分辨率输入时的卷积图层数量。
这里我们只使用三个卷积层,每个卷积层的内核大小为3×3,步幅2将分辨率减小到原始输入的1/8。与分支2中描述的融合类似,我们使用CFF单元在第三分支中以全分辨率合并先前CFF单元的输出和当前特征地图。最后,我们得到原始地图尺寸的1/8。
级联标签引导
对于每个分辨率下的输出特征映射,我们首先将其上采样2倍,这将在稍后描述CFF单元时详述。为了加强学习过程,我们采用级联标签引导策略。它使用1 / 16,1 / 8和1/4的地面真值标签来指导低,中和高分辨率输入的学习阶段。在测试阶段,简单地放弃低和中指导操作,只保留高分辨率分支。这种级联标签指导在降低推理成本的同时不会降低我们的最终结果的准确性非常有效。
该级联标签制导策略授予每个分支的辅助学习促进,使得梯度优化更加平滑以便于训练迭代。随着每个分支学习能力的增强,最终的预测图远没有被任何一个分支支配。同时,在测试期间放弃引导部分是效率方面的一种收益。
4.2. Branch Analysis

同时,在我们的ICNet中,最深层的网络结构最多只适用于低分辨率数据,能够有效地提取大多数语义信息。因此,即使超过50层,推理操作和内存消耗也不大,分别为18ms和0.6GB。以下部分的实验分析将说明更多的统计数据。
分支2中有17个卷积层,分支3中只有3个卷积层。通过这些少量的控制层来处理中值和高分辨率的输入数据,来自分支2和3的推理操作总数受到很好的约束。与此同时,分支2中的卷积层与第一分支共享权重和计算。因此,使用两个分支仅花费6ms来构建融合特征映射。
第三分支层次更少。虽然分辨率很高,但分支三的推断时间仅为9毫秒。通过所有这三个分支,我们提出的ICNet成为一个非常高效和内存友好的体系结构
4.3. Difference from Other Cascade Structures
其他几个分割框架也纳入了多尺度结构。 FCN 和DeepLab-MSC 对多分辨率预测图进行求和以生成最终得分图。 SegNet 和UNet在去卷积过程中采用跳跃连接来开发中层特征.LRR 应用了金字塔重建架构,其中特征地图从下到上重建。RefineNet 使用远程剩余连接融合来自不同层的多路径特征映射。
我们注意到这些方法专注于融合来自单一尺度输入或多尺度输入的不同层的特征。所有输入数据都通过整个网络。考虑到高分辨率输入,它们都面临着昂贵计算的同样问题。我们的ICNet使用低分辨率输入通过主语义分割分支并采用高分辨率信息来帮助细化,这些方法在性质上与所有这些方法都不同。重新绘制的特征地图大大减少,同时仍然保持必要的细节。
5. Cascade Feature Fusion and Final Model

为了结合来自不同分辨率图像的级联特征,我们最终提出了如图6所示的级联特征融合(CFF)单元。该单元的输入包含三个分量:分辨率为H1×Wi×C1和H2×W2×C2的两个特征地图Fi和F2,真实标签分辨率为H2×W2×1.F2的尺寸是 F1的尺寸的2倍。上采样应用于使Fi尺寸与F2相同。然后应用一个尺寸为3×3和膨胀1的扩张卷积层来改善上采样特征。
这种扩张卷积可以组合来自多个原始相邻像素的特征信息,而直接上采样使得每个像素仅取决于一个位置。与原始特征的去卷积操作相比,扩张卷积只需要小的内核。在我们的实现中,对于特征F2,利用具有内核大小1×1的投影卷积层以与特征Fi的输出相同的尺寸来投影它。
然后使用两个批处理标准化层来标准化这两个特征。接着是具有'SUM'操作和'ReLU'层的元素层,我们得到融合特征F,其具有与F2相同的分辨率。为了加强对Fi的学习,我们对上采样的Fi使用辅助标签指导。如[33]中的辅助损失权重设置为0.4。
5.1. The Loss Function
三个分支分别由三个损失:L1,L2,L3

6. Experimental Evaluation
我们的网络结构对PSPNet进行修改。我们将金字塔池模块中的拼接操作改为求和,从而将特征长度从4096减少到2048.我们将金字塔合并后的卷积层中的内核大小从原始3×3更改为1×1。它对最终准确度影响不大,但可以大量节省计算量。为了训练超参数,最小批量大小设置为16.基本学习率为0.01,采用“聚”学习速率策略,power为0.9,最大迭代次数为30k。动量为0.9,weight decay为0.0001。数据增加包含随机镜像和调整大小在0.5和2之间。