Opencv目标跟踪—CamShift和meanshift算法
Camshift原理
CamShift算法的全称是"Continuously Adaptive Mean-SHIFT",即:连续自适应的MeanShift算法。其基本思想是对视频序列的所有图像帧都作MeanShift运算,并将上一帧的结果(即搜索窗口的中心位置和窗口大小)作为下一帧MeanShift算法的搜索窗口的初始值,如此迭代下去。简单点说,meanShift是针对单张图片寻找最优迭代结果,而camShift则是针对视频序列来处理,并对该序列中的每一帧图片都调用meanShift来寻找最优迭代结果。正是由于camShift针对一个视频序列进行处理,从而保证其可以不断调整窗口的大小,如此一来,当目标的大小发生变化的时候,该算法就可以自适应地调整目标区域继续跟踪。
在OpenCV自带的camShift的例子当中,是通过计算目标在HSV空间下的H分量直方图,通过直方图反向投影得到目标像素的概率分布,然后通过调用OpenCV的CAMSHIFT算法,自动跟踪并调整目标窗口的中心位置与大小。该算法对于简单背景下的单目标跟踪效果较好,但如果被跟踪目标与背景颜色或周围其它目标颜色比较接近,则跟踪效果较差。另外,由于采用颜色特征,所以它对被跟踪目标的形状变化有一定的抵抗能力。
http://blog.csdn.net/carson2005/article/details/7439125
分为三个部分:
1--色彩投影图(反向投影):
(1).RGB颜色空间对光照亮度变化较为敏感,为了减少此变化对跟踪效果的影响,首先将图像从RGB空间转换到HSV空间。(2).然后对其中的H分量(色调)作直方图,在直方图中代表了不同H分量值出现的概率或者像素个数,就是说可以查找出H分量大小为h的概率或者像素个数,即得到了颜色概率查找表。(3).将图像中每个像素的值用其颜色出现的概率对替换,就得到了颜色概率分布图。这个过程就叫反向投影,颜色概率分布图是一个灰度图像。

2--meanshift
meanshift算法是一种密度函数梯度估计的非参数方法,通过迭代寻优找到概率分布的极值来定位目标。
算法过程为:
(1).在颜色概率分布图中选取搜索窗W
(2).计算零阶距:
计算一阶距:
计算搜索窗的质心:
(3).调整搜索窗大小
宽度为 ;长度为1.2s;
;长度为1.2s;
(4).移动搜索窗的中心到质心,如果移动距离大于预设的固定阈值,则重复2)3)4),直到搜索窗的中心与质心间的移动距离小于预设的固定阈值,或者循环运算的次数达到某一最大值,停止计算。关于meanshift的收敛性证明可以google相关文献。
3--camshift
将meanshift算法扩展到连续图像序列,就是camshift算法。它将视频的所有帧做meanshift运算,并将上一帧的结果,即搜索窗的大小和中心,作为下一帧meanshift算法搜索窗的初始值。如此迭代下去,就可以实现对目标的跟踪。
算法过程为:
(1).初始化搜索窗
(2).计算搜索窗的颜色概率分布(反向投影)
(3).运行meanshift算法,获得搜索窗新的大小和位置。
(4).在下一帧视频图像中用(3)中的值重新初始化搜索窗的大小和位置,再跳转到(2)继续进行。
camshift能有效解决目标变形和遮挡的问题,对系统资源要求不高,时间复杂度低,在简单背景下能够取得良好的跟踪效果。但当背景较为复杂,或者有许多与目标颜色相似像素干扰的情况下,会导致跟踪失败。因为它单纯的考虑颜色直方图,忽略了目标的空间分布特性,所以这种情况下需加入对跟踪目标的预测算法。
__________________________________________________________________________________________________________________________________________
半自动跟踪思路:输入视频,用画笔圈出要跟踪的目标,然后对物体跟踪。
用过opencv的都知道,这其实是camshiftdemo的工作过程。
第一步:选中物体,记录你输入的方框和物体。
第二步:求出视频中有关物体的反向投影图。
第三步:根据反向投影图和输入的方框进行meanshift迭代,由于它是向重心移动,即向反向投影图中概率大的地方移动,所以始终会移动到目标上。
第四步:然后下一帧图像时用上一帧输出的方框来迭代即可。
全自动跟踪思路:输入视频,对运动物体进行跟踪。
第一步:运用运动检测算法将运动的物体与背景分割开来。
第二步:提取运动物体的轮廓,并从原图中获取运动图像的信息。
第三步:对这个信息进行反向投影,获取反向投影图。
第四步:根据反向投影图和物体的轮廓(也就是输入的方框)进行meanshift迭代,由于它是向重心移动,即向反向投影图中概率大的地方移动,所以始终会移动到物体上。
第五步:然后下一帧图像时用上一帧输出的方框来迭代即可。
http://www.cnblogs.com/cfantaisie/archive/2011/06/10/2077190.html
下面是一个全自动跟踪的例子
代码是copy来的,从哪来的忘了……
- #include
- #include
- using namespace std;
- using namespace cv;
- //对轮廓按面积降序排列
- bool biggerSort(vector
v1, vector v2) - {
- return contourArea(v1)>contourArea(v2);
- }
- int main()
- {
- //视频不存在,就返回
- VideoCapture cap("3.AVI");
- if(cap.isOpened()==false)
- return 0;
- //定义变量
- int i;
- Mat frame; //当前帧
- Mat foreground; //前景
- Mat bw; //中间二值变量
- Mat se; //形态学结构元素
- //用混合高斯模型训练背景图像
- BackgroundSubtractorMOG mog;
- for(i=0;i<10;++i)
- {
- cout<<"正在训练背景:"<
- cap>>frame;
- if(frame.empty()==true)
- {
- cout<<"视频帧太少,无法训练背景"<
- getchar();
- return 0;
- }
- mog(frame,foreground,0.01);
- }
- //目标外接框、生成结构元素(用于连接断开的小目标)
- Rect rt;
- se=getStructuringElement(MORPH_RECT,Size(5,5));
- //统计目标直方图时使用到的变量
- vector
vecImg; - vector<int> vecChannel;
- vector<int> vecHistSize;
- vector<float> vecRange;
- Mat mask(frame.rows,frame.cols,DataType
::type); - //变量初始化
- vecChannel.push_back(0);
- vecHistSize.push_back(32);
- vecRange.push_back(0);
- vecRange.push_back(180);
- Mat hsv; //HSV颜色空间,在色调H上跟踪目标(camshift是基于颜色直方图的算法)
- MatND hist; //直方图数组
- double maxVal; //直方图最大值,为了便于投影图显示,需要将直方图规一化到[0 255]区间上
- Mat backP; //反射投影图
- Mat result; //跟踪结果
- //视频处理流程
- while(1)
- {
- //读视频
- cap>>frame;
- if(frame.empty()==true)
- break;
- //生成结果图
- frame.copyTo(result);
- //检测目标(其实是边训练边检测)
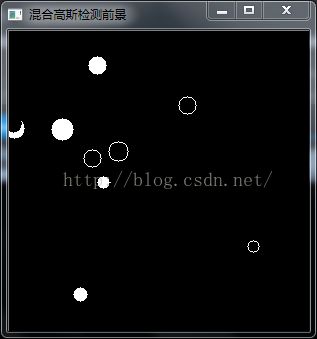
- mog(frame,foreground,0.01);
- imshow("混合高斯检测前景",foreground);
- moveWindow("混合高斯检测前景",400,0);
- //对前景进行中值滤波、形态学膨胀操作,以去除伪目标和接连断开的小目标
- medianBlur(foreground,foreground,5);
- imshow("中值滤波",foreground);
- moveWindow("中值滤波",800,0);
- morphologyEx(foreground,foreground,MORPH_DILATE,se);
- //检索前景中各个连通分量的轮廓
- foreground.copyTo(bw);
- vector
- findContours(bw,contours,RETR_EXTERNAL,CHAIN_APPROX_NONE);
- if(contours.size()<1)
- continue;
- //对连通分量进行排序
- std::sort(contours.begin(),contours.end(),biggerSort);
- //结合camshift更新跟踪位置(由于camshift算法在单一背景下,跟踪效果非常好;
- //但是在监控视频中,由于分辨率太低、视频质量太差、目标太大、目标颜色不够显著
- //等各种因素,导致跟踪效果非常差。 因此,需要边跟踪、边检测,如果跟踪不够好,
- //就用检测位置修改
- cvtColor(frame,hsv,COLOR_BGR2HSV);
- vecImg.clear();
- vecImg.push_back(hsv);
- for(int k=0;k
- {
- //第k个连通分量的外接矩形框
- if(contourArea(contours[k])
- break;
- rt=boundingRect(contours[k]);
- mask=0;
- mask(rt)=255;
- //统计直方图
- calcHist(vecImg,vecChannel,mask,hist,vecHistSize,vecRange);
- minMaxLoc(hist,0,&maxVal);
- hist=hist*255/maxVal;
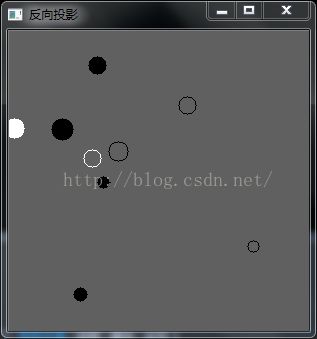
- //计算反向投影图
- calcBackProject(vecImg,vecChannel,hist,backP,vecRange,1);
- //camshift跟踪位置
- Rect search=rt;
- RotatedRect rrt=CamShift(backP,search,TermCriteria(TermCriteria::COUNT+TermCriteria::EPS,10,1));
- Rect rt2=rrt.boundingRect();
- rt&=rt2;
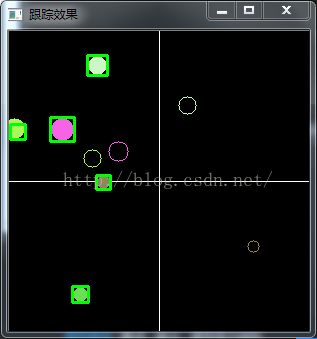
- //跟踪框画到视频上
- rectangle(result,rt,Scalar(0,255,0),2);
- }
- //结果显示
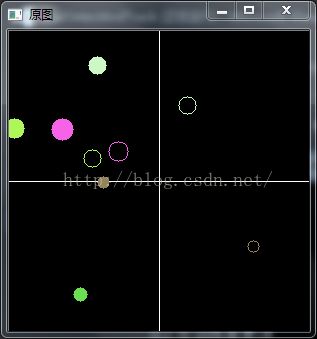
- imshow("原图",frame);
- moveWindow("原图",0,0);
- imshow("膨胀运算",foreground);
- moveWindow("膨胀运算",0,350);
- imshow("反向投影",backP);
- moveWindow("反向投影",400,350);
- imshow("跟踪效果",result);
- moveWindow("跟踪效果",800,350);
- waitKey(30);
- }
- getchar();
- return 0;
- }
3.avi是我写的一个目标运动仿真,用来做这个实验


BackgroundSubtractorMOG
http://blog.csdn.net/xiaowei_cqu/article/details/23689189
- int main()
- {
- VideoCapture video("3.avi");
- Mat frame,mask,thresholdImage, output;
- BackgroundSubtractorMOG bgSubtractor;
- while(true)
- {
- video>>frame;
- if (frame.empty())
- break;
- bgSubtractor(frame,mask,0.1);
- imshow("mask",mask);
- waitKey(10);
- }
- return 0;
- }