RGB-D 实时三维重建/SLAM 中的 ICP 算法解析
Dense SLAM 采用 dense 配准的形式计算 pose,dense 配准优化,损失函数项一般有两个,一个是如 ICP 算法,cost 项是匹配点的点到平面距离,另一个是匹配点的像素值误差。这里给出 ICP 算法介绍和推导。
关于 ICP 算法
ICP 算法主要用于点云配准,在两帧点云位姿差别较大时,通常先用 3D 特征匹配计算粗略位姿,然后再用 ICP 算法对位姿做 refine。在实时的三维重建中,由于相邻两帧之间位姿变化比较小,在变量求解时,直接用上一帧的位姿初始化。
在 Dense SLAM 中,ICP 算法通常通过极小化匹配点的点到平面的距离计算 pose,ICP 算法有好多变种。
算法步骤
1、对输入的两幅深度图像,做 3 层抽样,对于抽样后的深度图像做滤波,点云配准以 coarse-to-fine 的方式进行。
2、在给定深度图像内参情况下,通过原始深度图像可以计算点的三维坐标(用于点云的配准和融合),对于滤波后的深度图像也计算三维点云坐标(用于计算法向量)。
3,根据上一次迭代求得的 pose 变换点坐标。
4、对于两幅点云根据投影算法计算匹配点。
5、对于匹配点极小化点到平面距离计算位姿。
6、目标函数误差小于一定值时,或者到达设置的迭代次数停止迭代,否则进入第 3 步。
投影算法计算匹配点
由于两帧图像间位姿变换比较小,采用投影算法计算匹配点,投影算法计算匹配点比基于 kd-tree 的匹配算法速度快,对于一幅深度图像三维点坐标 pi ,可以计算在另一幅图像中的投影像素坐标:
k(ud, vd,1)=KTjipi
pi :深度图像 i 中点的三维坐标,
Tji :从图像 i 到图像 j 到 pose,
K :相机内参数,
(ud, vd) : pi 在图像 j 中的投影像素坐标。
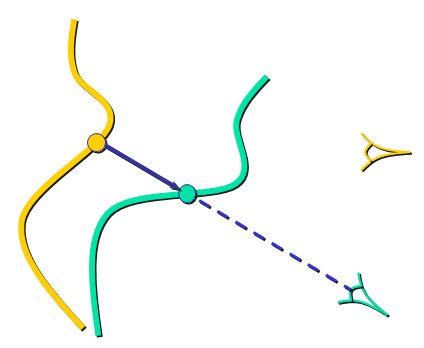
对于图像 i 中的点 pi ,在图像 j 像素位置 (ud, vd) 周围找三维坐标值和法向量相近的点作为匹配点,示意图如下:
极小化点到平面距离计算 pose
点到平面距离示意图如下:
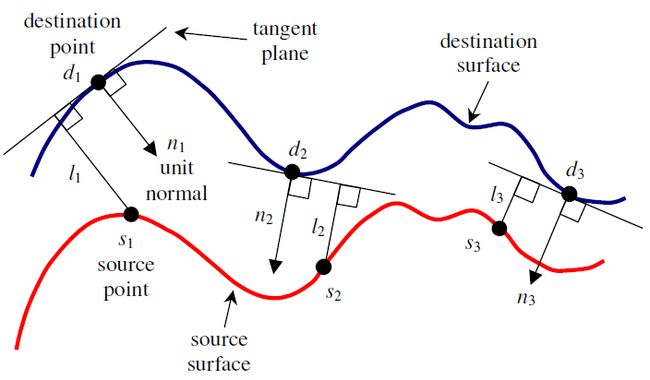
目标函数如下:
上式表达式中 R, t 是待求解的 pose,在每次迭代时实际是值很小的 ΔR 和 Δt ,
pi 和 qi 分别是原始点和目标点, ni 指目标点的法向量。
上式关于 R 只有三个自由度,用 r=(rx, ry, rz) 表示,平移向量 t 表示为 t=(tx, ty, tz) 。
旋转矩阵 R 是非线性的,从而目标函数也是非线性,这里将 R 线性化。
当相邻两帧之间位姿变化较小时,可以有以下近似: sin(θ)=θ, cos(θ)=1
在三个方向上 R 的旋转角为 r=(rx, ry, rz) ,对于 Rpi+t≈pi+r×pi+t ,并且 r×pi⋅ni=r⋅(pi×ni) ,由以上近似,目标函数可以写为:
以上目标函数对 6 个维度位姿参数求导并且令导数为 0,可以得到 Ax+b=0 , A 的表达式为:
写成单个点累加形式:
b 的表达式为:
写成单个点累加形式:
未知参量 x 表达式为 x=(rx, ry, rz, tx, ty tz) 。
上式对于单点求和的形式,可以用 GPU 做并行计算,累加的结果传到 CPU ,在 CPU中求解 Ax+b=0 。