nrf51822裸机教程-UART
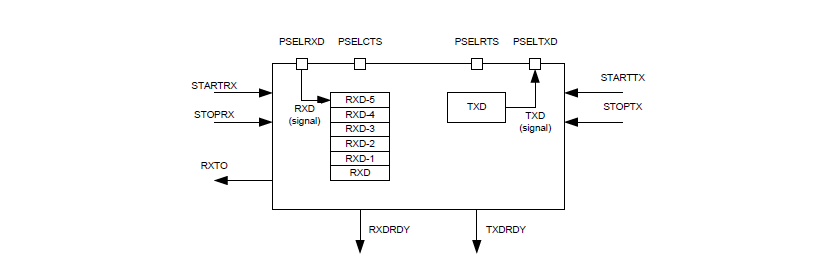
Uart硬件模块通常都有内置的硬件接收buff,比如51822的硬件uart模块图如下
因为通常接收到uart数据时都会做一些处理。比如保存到数据,或者对数据做一些判断之类的。
如果uart的波特率设置的很快,mcu的处理速度又不是很快或者是处理的过程比较耗时,那么当uart串口连续过来很多数据时,你在处理第一个数据时,后续的数据就可能丢失。所以通常uart模块都会内置一个很小的硬件接收buff,51822就内置了一个6字节的硬件接收buff。这样就能起到缓存作用。
Uart一般有两种工作方式 带流控和不带流控的。
带流控的工作方式 就是多了RTS(表示可以是否可以接收)和CTS(表示是否可以发送)引脚。
RTS引脚作为输出,由uart硬件模块自动控制。通常就是与上面所说的硬件Buff协调自动工作。比如在硬件buff已经填充了2个字节还剩下4个字节的时候RTS引脚就输出高电平的deactivate 信号(51822的工作方式就是这样),当buff中的数据都被读出后回复有效信号(低电平)。
CTS作为输入由外部输入。 当CTS有效时(低电平)模块可以发送,当为无效时,模块自动暂停发送,并在CTS恢复有效时继续发送。
那么将两个uart模块的rts与cts交叉相接。 如果发送方发送太快,当接收方的接收硬件buff已经存了两个字节后,接收方自动无效rts信号,表示不能接收了。 因为接收方rts与发送方cts相接。 所以发送方的cts也编程无效信号,于是发送方自动停止发送。
这样就保证了接收方不会接收溢出。流量控制也就是体现在这里。
这里说的是51822的,至于为什么收到两个字节还剩4个字节的buff就设置rts无效信号,表示自己不收了,手册中uart部分有详细的说明。
不同的mcu中的uart特性都会有一些各自的特性。不过原理都是跟上面一样的。
关于硬件流控不熟悉的可能不好理解,建议百度多看看相关说明。看看手册中的发送时序也有助于理解。
但是针对使用来说,不理解他的工作方式也不会有问题。只要将两个uart模块的cts,rts交叉相接,使能Uart的流控就可以了。因为是硬件流控,上面所说的过程都是硬件自动进行的。
不带流控的工作方式 就只需要tx ,rx,电源,地就行了。现代mcu工作频率一般都比较高,处理速度也比较快。所以不带流控的工作方式基本能满足很多很多应用了。
后面的教程代码也是使用不带流控的工作方式(我的板子上usb转串口芯片没接rts,cts)。
首先看一下寄存器的介绍:
ENABLE: 使能uart模块
PSELRXD: 选择GPIO作为RX引脚
PSELTXD: 选择GPIO作为TX引脚
RXD:接收寄存器。从改寄存器中获取uart接收到的数据
TXD: 将需要发送的数据填入该寄存器。
BAUDRATE: 设置波特率。只支持固定的几个波特率。具体查看手册。
CONFIG:用来使能校验(偶校验)和流控。
下面介绍uart轮询方式和中断方式具体操作。
新建工程选择自己板子使用的芯片型号: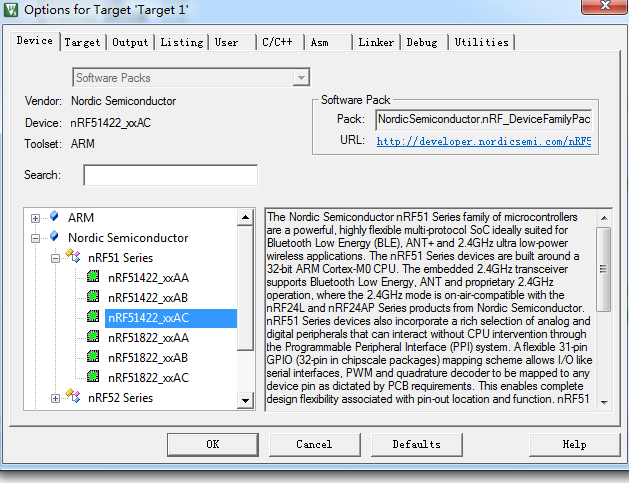
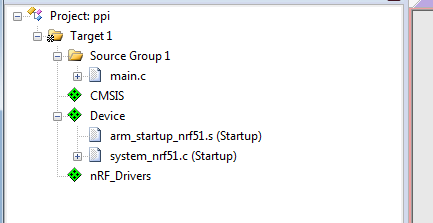
教程中为了更直接的理解模块的使用。不使用sdk中提供的库函数,而直接操作寄存器来实现。
所以运行时环境勾选下必要的CMSIS下的CORE,Device下的Startup。因为用了gpio的函数 勾选一下nRF_Drivers下的nrf_gpio 就可以了。

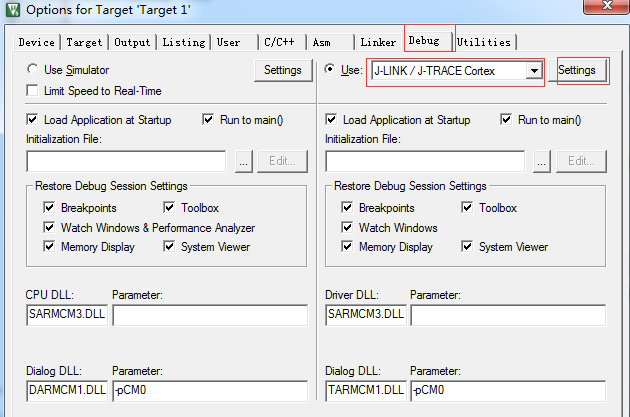
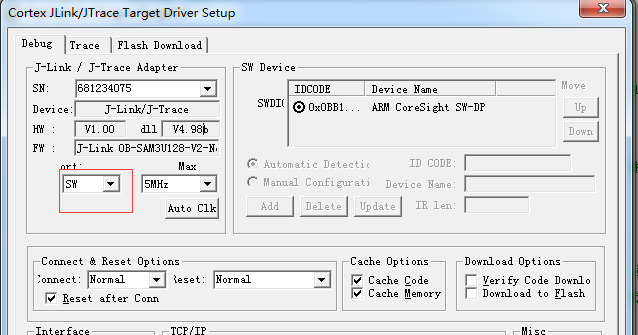
然后配置jlink的设置(我的板子使用的是jlink的sw方式下载程序)。
创建main.c文件,然后添加到工程中
下面介绍main.c代码细节。
使用轮训方式工作
#include "nrf51.h"
#include "nrf_gpio.h"
#define RX_PIN (11)
#define TX_PIN (9)
void uart_init(void){
//设置引脚输入输出方向
nrf_gpio_cfg_input(RX_PIN, NRF_GPIO_PIN_NOPULL);
nrf_gpio_cfg_output(TX_PIN);
//设置输入输出引脚。 流控引脚置位无效值
NRF_UART0->PSELRXD = RX_PIN;
NRF_UART0->PSELTXD = TX_PIN;
NRF_UART0->PSELRTS = 0XFFFFFFFF;
NRF_UART0->PSELCTS = 0XFFFFFFFF;
NRF_UART0->BAUDRATE = 0x00275000; //9600波特率
NRF_UART0->CONFIG = 0; //不使用流控,不使用校验
//清零一下事件
NRF_UART0->EVENTS_RXDRDY = 0;
NRF_UART0->EVENTS_TXDRDY = 0;
NRF_UART0->ENABLE = 4; //开启uart
NRF_UART0->TASKS_STARTRX = 1; //使能接收
NRF_UART0->TASKS_STARTTX = 1; //使能发送
}
uint8_t get_uart_data(void){
uint8_t temp;
//轮训等待直到收到数据
while(NRF_UART0->EVENTS_RXDRDY == 0 ){
;
}
/*注意要先清接收一字节完成RXDRDY事件再做接收保存处理,原因见手册,发送也是如此*/
NRF_UART0->EVENTS_RXDRDY = 0;
temp = NRF_UART0->RXD;
return temp;
}
void send_uart_byte(uint8_t data){
uint8_t temp = data;
NRF_UART0->EVENTS_TXDRDY = 0;
NRF_UART0->TXD = temp;
//轮训等待直到数据发送完毕
while(NRF_UART0->EVENTS_TXDRDY == 0){
;
}
}
int main(void){
uint8_t data;
uart_init();
//死循环等待输入,电脑串口输入 0-9字符后板子会发送回去在电脑串口上 //显示
while( 1 ){
data = get_uart_data();
if ( data <= '9' && data >= '0' ){
send_uart_byte(data);
}
}
return 0;
}
-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
分割线
-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
中断方式工作:
使用中断方式,需要设置使能事件触发中断
INTENSET:用来设置使能在 rx,tx完成事件发生时触发中断。
这里写的例子比较简单,也不方便使用。仅仅只是为了演示一下uart中断接收和发送。
例子中接收中断收到20字节数据就会置位一个 标志变量,main循环中检查这个标量被置位后就会启动发送。Main中只是发送了一个字节。因为每个字节发送完成后都会产生发送完成事件并进入中断。所以后续的19个字节 会在中断中依次发送。
如果需要在自己的工程中使用uart的中断发送和接收。应该参考nordic sdk中的app_uart_fifo.c中的实现, 使用一个状态机和两个缓冲buff来控制uart的接收和发送。
void uart_init(void){
nrf_gpio_cfg_input(RX_PIN, NRF_GPIO_PIN_NOPULL);
nrf_gpio_cfg_output(TX_PIN);
//设置输入输出引脚。 流控引脚置位无效值
NRF_UART0->PSELRXD = RX_PIN;
NRF_UART0->PSELTXD = TX_PIN;
NRF_UART0->PSELRTS = 0XFFFFFFFF;
NRF_UART0->PSELCTS = 0XFFFFFFFF;
NRF_UART0->BAUDRATE = 0x00275000; //9600波特率
NRF_UART0->CONFIG = 0; //不适用流控,不使用校验
NRF_UART0->INTENSET = ( 1<<2 ) | ( 1<<7 ); //使能 RXDRDY和TXDRDY事件触发中断
//清零一下事件
NRF_UART0->EVENTS_RXDRDY = 0;
NRF_UART0->EVENTS_TXDRDY = 0;
NRF_UART0->ENABLE = 4; //开启uart
NRF_UART0->TASKS_STARTRX = 1; //使能接收
NRF_UART0->TASKS_STARTTX = 1; //使能发送
//开启MCU的uart中断
NVIC_SetPriority(UART0_IRQn, 1);
NVIC_ClearPendingIRQ(UART0_IRQn);
NVIC_EnableIRQ(UART0_IRQn);
}
#define BUFF_SIZE (30)
uint8_t data[BUFF_SIZE];
uint8_t receive_index = 0;
uint8_t send_index = 0;
uint8_t flag = 0;
int main(){
uart_init();
while(1){
if ( flag ==1 ){
flag = 0; //重置flag
NRF_UART0->TXD = data[send_index++]; //这里只发送一个字节,剩余19的字节通过中断发送
}
}
return 0;
}
void UART0_IRQHandler(void){
if (NRF_UART0->EVENTS_RXDRDY != 0)
{
/// 注意清0事件标志
NRF_UART0->EVENTS_RXDRDY = 0;
data[receive_index++] = (uint8_t)NRF_UART0->RXD;
if(receive_index == 20){
receive_index = 0;
flag = 1;
}
}
if (NRF_UART0->EVENTS_TXDRDY != 0)
{
// 注意清0事件标志
NRF_UART0->EVENTS_TXDRDY = 0;
if(send_index != 0){ //只要没发送完就继续发送
NRF_UART0->TXD = data[send_index++];
if(send_index == 20){
send_index = 0; //发送完了,重置0
}
}
}
}