【实例分割论文】SOLO v2: Dynamic, Faster and Stronger
论文名称:《SOLOv2: Dynamic, Faster and Stronger》
论文链接:https://arxiv.org/abs/2003.10152
参考代码:http://github.com/WXinlong/SOLO (v1已开源~)
目录
综述
SOLO v1回顾
整体思路
操作流程(附源代码)
改进空间
SOLO v2
mask learning
Mask kernel branch
Mask feature branch
其他
mask NMS
实验结果
总结
综述
SOLO v2遵循了SOLO的优雅、简单的设计,并且针对mask的检测效果和运行效率做了两个改进:(1)mask learning:能够更好地学习到mask(2)mask NMS:提出了matrix nms,大大减少了前向推理的时间。 最终,SOLOv2相比SOLOv1,AP提升1.9%的同时速度快了33%,light-weight 版本的SOLVv2能够在COCO上达到31.3FPS,37.1%AP。除此之外,SOLO v2还在目标检测和全景分割任务中表现上佳,证实了SOLO的思路有用在更多视觉任务的潜力。
 COCO 性能指标
COCO 性能指标
SOLO v1回顾
整体思路
 SOLO v1 结构图
SOLO v1 结构图
SOLO的核心思想是:将分割问题转化为位置分类问题,从而做到不需要anchor,不需要normalization,不需要bounding box detections的实例分割。具体做法是:将图片划分成S×S的网格,如果物体的中心(质心)落在了某个网格中,那么该网格就有了两个任务:(1)Category Branch 负责预测该物体语义类别(2)Mask Branch 负责预测该物体的instance mask。这就对应了网络的两个分支。同时,SOLO在骨干网络后面使用了FPN,用来应对尺寸。FPN的每一层后都接上述两个并行的分支,进行类别和位置的预测,每个分支的网格数目也相应不同,小的实例对应更多的的网格。
Category Branch负责预测物体的语义类别,每个网格预测类别S×S×C,这部分跟YOLO是类似的。
重点看一下Mask Branch,每个正样本(有类别输出的网格)都会输出对应类别的instance mask,这里的通道channel和网格的对应关系是:第k个通道负责预测出第(i,j)个网格的instance mask,k = i*S+j。因此输出维度是H×W×(S^2) 。这样的话就有了一一对应的语义类别和class-agnostic的instance mask。
操作流程(附源代码)
SOLO的两个分支光看论文可能会比较迷糊,还好作者昨天开源了源代码,通过代码可以更加清晰地了解head部分的操作流程。总结如下:
(1)首先经过backbone网络和FPN,得到不同层级的图像特征;
(2)对于Category分支,首先将FPN最高层的特征从H×W×256对齐至S×S×256(256为特征通道数),然后经过一系列卷积(7个3×3卷积)提取特征,最后再经过一个3×3卷积将输出对齐到S×S×C(C为预测类别-1);
# cate branch
for i, cate_layer in enumerate(self.cate_convs):
if i == self.cate_down_pos:
seg_num_grid = self.seg_num_grids[idx]
cate_feat = F.interpolate(cate_feat, size=seg_num_grid, mode='bilinear')
# 将FPN最高层的特征从H*W*feat_channel 对齐到 S*S*feat_channel
cate_feat = cate_layer(cate_feat) # 7个卷积
cate_pred = self.solo_cate(cate_feat) # 从 S*S*feat_channel 到 S*S*num_classes(3)对于Mask分支,首先对FPN最高层的特征做一个CoordConv,然后同样经过一系列卷积(7个3×3卷积)提取特征,此时维度为H×W×256,再做一步上采样至2H×2W×256,最后就是对齐到2H×2W×S^2的输出(Decoupled SOLO此处则为2H×2W×S)
# ins branch
# concat coord
x_range = torch.linspace(-1, 1, ins_feat.shape[-1], device=ins_feat.device)
y_range = torch.linspace(-1, 1, ins_feat.shape[-2], device=ins_feat.device)
y, x = torch.meshgrid(y_range, x_range)
y = y.expand([ins_feat.shape[0], 1, -1, -1])
x = x.expand([ins_feat.shape[0], 1, -1, -1])
coord_feat = torch.cat([x, y], 1)
ins_feat = torch.cat([ins_feat, coord_feat], 1) # CoordConv
for i, ins_layer in enumerate(self.ins_convs): # 7个3*3 Conv 提取特征
ins_feat = ins_layer(ins_feat) # H*W*feat_channel
ins_feat = F.interpolate(ins_feat, scale_factor=2, mode='bilinear') # 上采样到2H*2W*feat_channel
ins_pred = self.solo_ins_list[idx](ins_feat)
# 从2H*2W*feat_channel到2H*2W*(S^2) S^2的复杂度,这里也是Decoupled 和 Solo v2的优化之处改进空间
 不同的mask head对比
不同的mask head对比
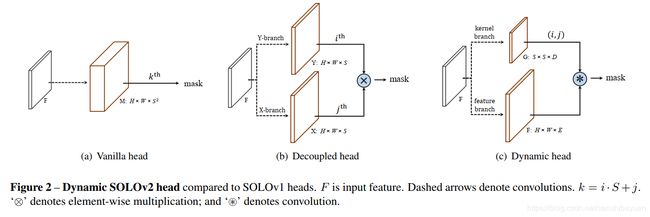
仔细来看一下mask branch的最后一层的情况,如图中的(a)所示:这其实是一个1×1的卷积,以特征F(维度为H×W×E)做输入,输出M(维度为H×W×(S^2)),S^2的输出通道。这里卷积核设为G,G的维度就是1×1×E×(S^2)。这一层的操作其实是M=F∗G,作用是生成S×S个分类器,每个分类器都用来判断像素点是否属于这个位置的类别。
在SOLO v1中也提到了,包含S×S输出通道的M是冗余的,因为在大多数情况下物体在图片中的分布都是稀疏的,起到作用的通道(分类器数目)远远少于S×S。因此SOLO v1提出了Decoupled SOLO,如图中的(b)所示,通过将这些分类器分解成X和Y两个方向,将输出通道从S×S降到了S+S。
SOLO v2中提出了另一种思路,更加直接,如图中的(c)所示。由于M=F∗G中的M是冗余,F是固定的,那么就可以直接去学习卷积核G。这样做的话有三个好处:
- 可以直接从S×S的分类器中挑选出有效(valid)的部分作为结果,减少了模型参数;
- 卷积核的参数是基于输入预测的,更加flexible and adaptive;
- 最终得到的S×S的分类器是基于location的,这跟SOLO的本质思想(segmenting objects by locations)是相符合的,并且将其延伸到了predicting the segmenters by locations这一新高度。
此外,由于SOLO是一个完全box-free的算法,没有依赖box去生成mask,因此不需要做box的NMS,但取而代之的是需要做mask的NMS,但mask NMS是一个比较费时间的地方,复杂度比box NMS高不少,这也是SOLO需要优化的点。
P.S:关于SOLO的详情解读可以看我之前的论文笔记:
【实例分割论文】 SOLO:Segmenting Objects by Locations
关于其他单阶段实例分割方法如YOLACT和BlendMask可以看我的另一篇文章:
【进展综述】单阶段实例分割(Single Shot Instance Segmentation)
SOLO v2
mask learning
 使用dynamic head的mask branch
使用dynamic head的mask branch
SOLO v2中的mask branch 被分解为mask kernel branch和mask feature branch,分别对应卷积核的学习和特征的学习。两个分支的输出最终组合成整个mask branch的输出。
Mask kernel branch
Mask kernel branch用来学习卷积核,即分类器的权重,有点类似STN和Dynamic Filter的思路。这里输入为H×W×E的特征F,其中E是输入特征的通道数;输出为卷积核S×S×D,其中S是划分的网格数目,D是卷积核的通道数。对应关系如下:1×1×E的卷积核,则D=E,3×3×E的卷积核,则D=9E,以此类推。注意到这里不需要激活函数。
Mask feature branch
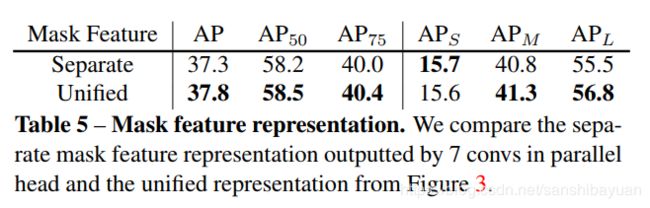
Mask feature branch用来学习特征的表达,它的输入是backbone+FPN提取的不同层级的特征,输出是H×W×E的mask feature,用F表示。SOLO框架中一个重要的设计就是采用了FPN,应对不同的尺寸。如何将不同层级的特征融合得到mask feature是一个重要的部分。通常来说,可以有两种做法:
- unified maskfeature representation:对每一层级都预测一个mask feature,再进行融合(predict the maskfeatures for each FPN levels)
- separate maskfeature representation:直接对所有的层级预测一个统一的mask feature(predict a unified maskfeature representation for all FPN levels)。
 不同mask feature表达的对比实验
不同mask feature表达的对比实验
 unified maskfeature representation
unified maskfeature representation
经过试验对比,作者选择了unified maskfeature representation。具体的实现则参考了Panotic FPN中的feature pyramid fusion,将FPN的P2到P5层分别依次通过【若干个3×3卷积 + group norm + ReLU + 2个双线性插值操作】,统一到原图的1/4尺寸,再做element-wise summation,最后接【1 × 1 convolution + group norm + ReLU】。
需要注意的是这里的 CoordConv 是在FPN的最高层(原图的1/32尺寸)使用,位置在3×3卷积和双线性插值之前。CoordConv的作用与SOLO v1中相同,提供更准确的位置敏感信息和实例特征信息。
其他
有了前两个分支的输出,生成mask也就水到渠成。具体的做法是:对于在(i,j)的每个网格,先获得卷积核G,然后将其与特征F卷积得到实例Mask,这会生成【最多】S×S个mask。最后,使用Matrix NMS方法得到最终的实例分割结果。
损失函数和标签分配方法等与SOLO v1保持一致。
在前向预测的过程中,图像先通过backbone和FPN,得到grid(i,j)位置的类别分值P(i,j)之后,先用较低的置信度阈值0.1筛选一遍结果后,再进行卷积提取mask 特征。mask特征与预测得到的卷积核进行卷积,再经过一个sigmoid操作,然后用0.5的阈值生成binary mask,最后做一步Matrix NMS,得到结果。
mask NMS
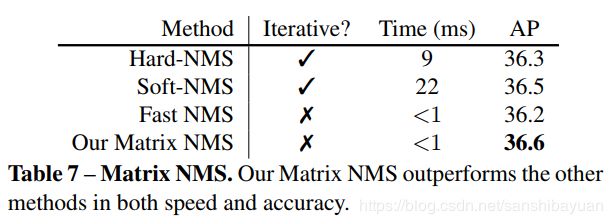
NMS是视觉任务的老熟人了,其缺点是繁琐、冗余的计算,此外,mask NMS 会比bbox NMS 造成更多的计算时间。对NMS的优化已经有了不少工作,通常分为两类,一是Soft NMS和Adaptive NMS,主要优化了精度;另一类是YOLACT中的Fast NMS,主要优化了速度。
SOLO v2中提出了Matrix NMS,思路源于Soft NMS,效果类似Fast NMS。使用并行的矩阵运算单次地实现NMS,Matrix NMS可以做到在不到1ms的时间里处理500张mask,并且比目前最快的Faster NMS要高0.4% AP。
Soft NMS的思路通过递归地根据IoU降低其他bbox的检测分数,分数较高的检测结果被降低分数后将被以很小的阈值消除。经过优化,这种顺序的过程与传统的Greedy NMS一样是顺序的,无法并行实现。
Matrix NMS的思路是
对于一个预测得到的mask,它的decay factor主要受两部分影响:
一是得分大于j点的所有i点对i的惩罚,这个很好实现,直接通过算一个包含IoU的衰减函数(线性衰减或高斯衰减)![]() 就能得到;
就能得到;
二是整个mask被抑制的概率,这个概率就比较难直接算,但它通常与IoU有着正相关的关系。因此,Matrix NMS提出直接将最大重复的预测结果(对应最大的IoU值)的结果来近似这个抑制概率![]()
最后得到的decay factor就是![]() ,预测的分值就通过这个decay factor单步更新
,预测的分值就通过这个decay factor单步更新![]()
Matrix NMS实现可以一次性完成,不需要循环重复,具体的实现就不多说了,附上伪代码和对比实验结果。
 Matrix NMS的Python伪代码
Matrix NMS的Python伪代码
 Matrix NMS的对比实验
Matrix NMS的对比实验
实验结果
实验结果就没啥好说的了,总的来说:更快更强,适应不同任务/不同数据集;分割效果来说,也要更加精细。
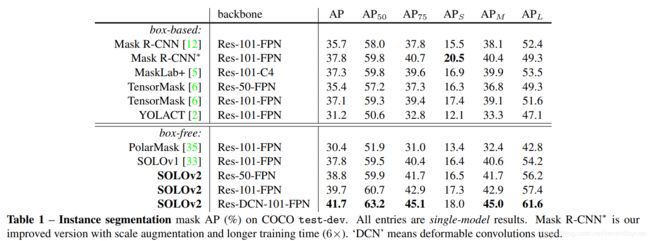 COCO instance segmentation
COCO instance segmentation
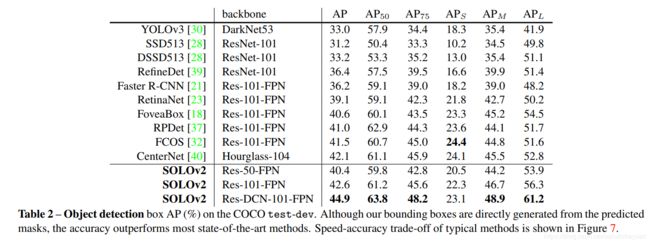 COCO object detection
COCO object detection
 与Mask R-CNN对比
与Mask R-CNN对比
总结
延续了SOLO的良好思路,改进点也很扎实,期待继续出v3~