图像语义分割之FCN和CRF
前言
(呕血制作啊!)前几天刚好做了个图像语义分割的汇报,把最近看的论文和一些想法讲了一下。所以今天就把它总结成文章啦,方便大家一起讨论讨论。本文只是展示了一些比较经典和自己觉得比较不错的结构,毕竟这方面还是有挺多的结构方法了。
介绍
图像语义分割,简单而言就是给定一张图片,对图片上的每一个像素点分类
从图像上来看,就是我们需要将实际的场景图分割成下面的分割图:
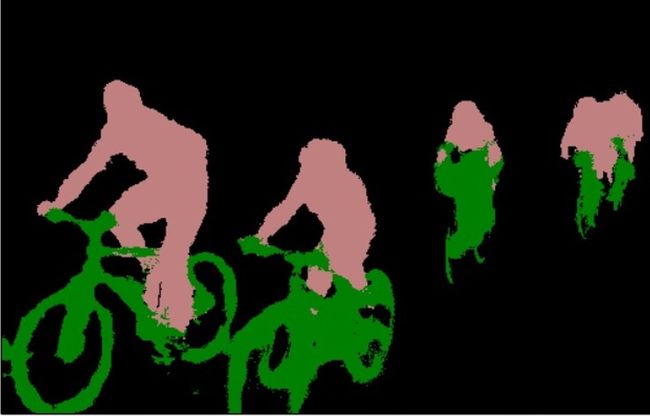
不同颜色代表不同类别。
经过我阅读“大量”论文(羞涩)和查看Pascal VOC 2012 Learderboard,我发现图像语义分割从深度学习引入这个任务(FCN)到现在而言,一个通用的框架已经大概确定了。即:
- FCN-全卷积网络
- CRF-条件随机场
- MRF-马尔科夫随机场
前端使用FCN进行特征粗提取,后端使用CRF/MRF优化前端的输出,最后得到分割图。
接下来,我会从前端和后端两部分进行总结。
前端
为什么需要FCN
我们分类使用的网络通常会在最后连接几层全连接层,它会将原来二维的矩阵(图片)压扁成一维的,从而丢失了空间信息,最后训练输出一个标量,这就是我们的分类结果。
而图像语义分割的输出需要是个分割图,且不论尺寸大小,但是至少是二维的。所以,我们需要丢弃全连接层,换上全卷积层,而这就是全卷积网络了。具体定义请参看论文:Fully Convolutional Networks for Semantic Segmentation
前端结构
FCN
此处的FCN特指Fully Convolutional Networks for Semantic Segmentation论文中提出的结构,而非广义的全卷积网络。
作者的FCN主要使用了三种技术:
- 卷积化(Convolutional)
- 上采样(Upsample)
- 跳跃结构(Skip Layer)
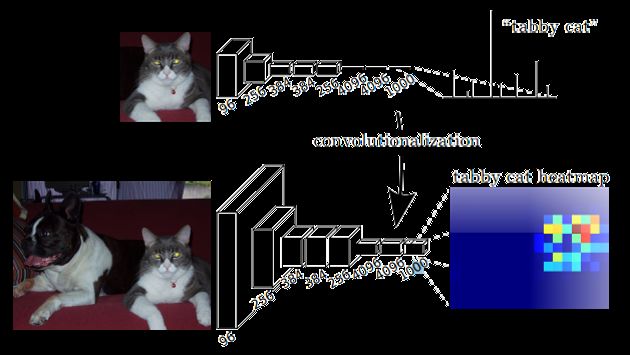
卷积化
卷积化即是将普通的分类网络,比如VGG16,ResNet50/101等网络丢弃全连接层,换上对应的卷积层即可。如下图:
上采样
此处的上采样即是反卷积(Deconvolution)。当然关于这个名字不同框架不同,Caffe和Kera里叫Deconvolution,而tensorflow里叫conv_transpose。CS231n这门课中说,叫conv_transpose更为合适。
众所诸知,普通的池化(为什么这儿是普通的池化请看后文)会缩小图片的尺寸,比如VGG16 五次池化后图片被缩小了32倍。为了得到和原图等大的分割图,我们需要上采样/反卷积。
反卷积和卷积类似,都是相乘相加的运算。只不过后者是多对一,前者是一对多。而反卷积的前向和后向传播,只用颠倒卷积的前后向传播即可。所以无论优化还是后向传播算法都是没有问题。图解如下:

但是,虽然文中说是可学习的反卷积,但是作者实际代码并没有让它学习,可能正是因为这个一对多的逻辑关系。代码如下:
layer {
name: "upscore"
type: "Deconvolution"
bottom: "score_fr"
top: "upscore"
param {
lr_mult: 0
}
convolution_param {
num_output: 21
bias_term: false
kernel_size: 64
stride: 32
}
}可以看到lr_mult被设置为了0.
跳跃结构
(这个奇怪的名字是我翻译的,好像一般叫忽略连接结构)这个结构的作用就在于优化结果,因为如果将全卷积之后的结果直接上采样得到的结果是很粗糙的,所以作者将不同池化层的结果进行上采样之后来优化输出。具体结构如下:
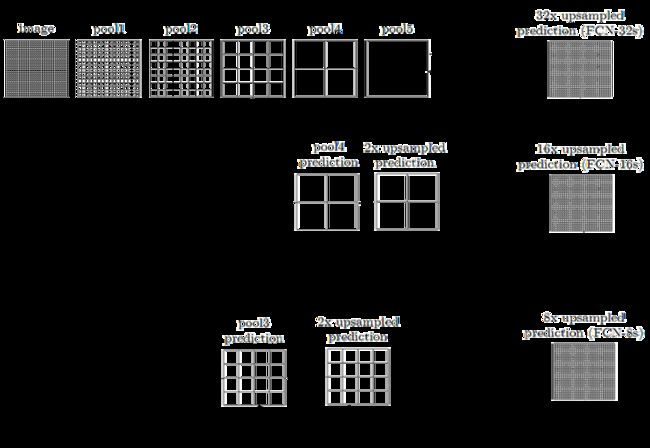
而不同上采样结构得到的结果对比如下:

当然,你也可以将pool1, pool2的输出再上采样输出。不过,作者说了这样得到的结果提升并不大。
这是第一种结构,也是深度学习应用于图像语义分割的开山之作,所以得了CVPR2015的最佳论文。但是,还是有一些处理比较粗糙的地方,具体和后面对比就知道了。
SegNet/DeconvNet
这样的结构总结在这儿,只是我觉得结构上比较优雅,它得到的结果不一定比上一种好。
SegNet
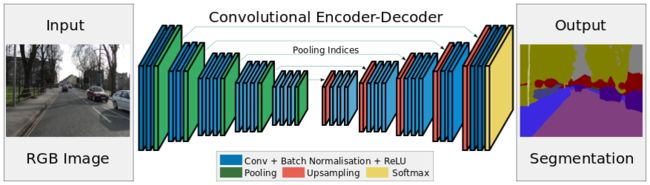
DeconvNet
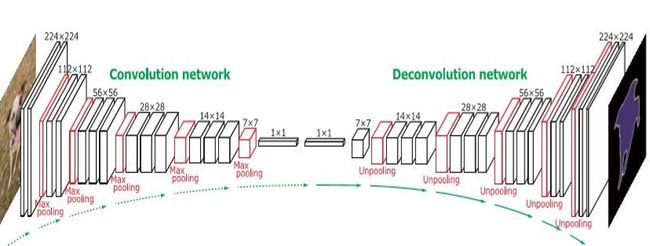
这样的对称结构有种自编码器的感觉在里面,先编码再解码。这样的结构主要使用了反卷积和上池化。即:

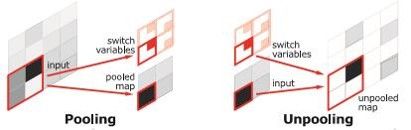
反卷积如上。而上池化的实现主要在于池化时记住输出值的位置,在上池化时再将这个值填回原来的位置,其他位置填0即OK。
DeepLab
接下来介绍一个很成熟优雅的结构,以至于现在的很多改进是基于这个网络结构的进行的。
首先这里我们将指出一个第一个结构FCN的粗糙之处:为了保证之后输出的尺寸不至于太小,FCN的作者在第一层直接对原图加了100的padding,可想而知,这会引入噪声。
而怎样才能保证输出的尺寸不会太小而又不会产生加100padding这样的做法呢?可能有人会说减少池化层不就行了,这样理论上是可以的,但是这样直接就改变了原先可用的结构了,而且最重要的一点是就不能用以前的结构参数进行fine-tune了。所以,Deeplab这里使用了一个非常优雅的做法:将pooling的stride改为1,再加上1padding。这样池化后的图片尺寸并未减小,并且依然保留了池化整合特征的特性。
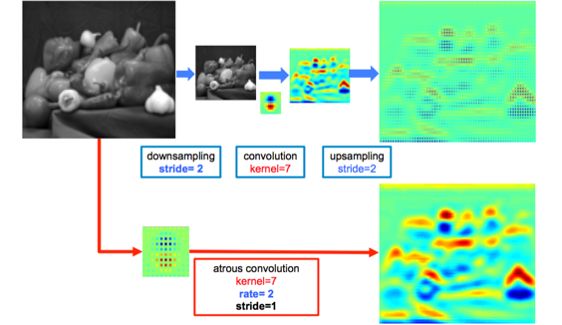
但是,事情还没完。因为池化层变了,后面的卷积的感受野也对应的改变了,这样也不能进行fine-tune了。所以,Deeplab提出了一种新的卷积,带孔的卷积:Atrous Convolution.即:
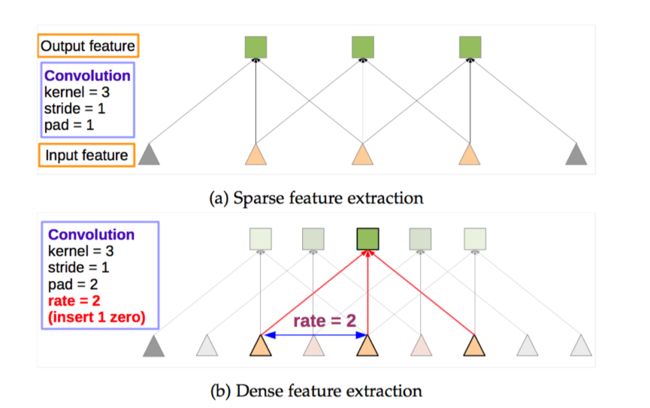
而具体的感受野变化如下:
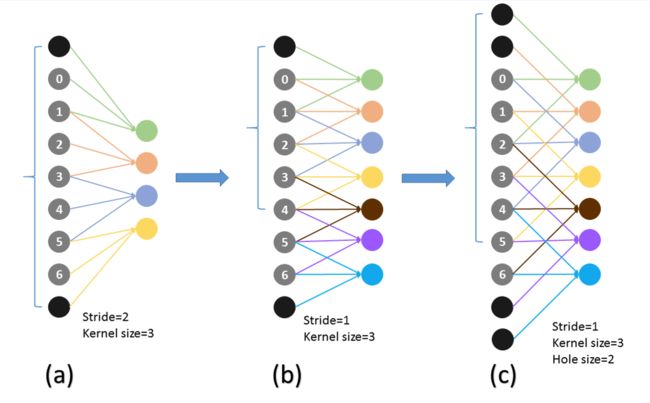
a为普通的池化的结果,b为“优雅”池化的结果。我们设想在a上进行卷积核尺寸为3的普通卷积,则对应的感受野大小为7.而在b上进行同样的操作,对应的感受野变为了5.感受野减小了。但是如果使用hole为1的Atrous Convolution则感受野依然为7.所以,Atrous Convolution能够保证这样的池化后的感受野不变,从而可以fine tune,同时也能保证输出的结果更加精细。即:
总结
这里介绍了三种结构:FCN, SegNet/DeconvNet,DeepLab。当然还有一些其他的结构方法,比如有用RNN来做的,还有更有实际意义的weakly-supervised方法等等。
后端
终于到后端了,后端这里会讲几个场,涉及到一些数学的东西。我的理解也不是特别深刻,所以欢迎吐槽。
全连接条件随机场(DenseCRF)
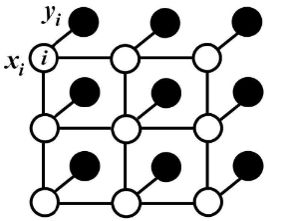
对于每个像素 i 具有类别标签 xi 还有对应的观测值 yi ,这样每个像素点作为节点,像素与像素间的关系作为边,即构成了一个条件随机场。而且我们通过观测变量 yi 来推测像素 i 对应的类别标签 xi 。条件随机场如下:
条件随机场符合吉布斯分布:(此处的 x 即上面说的观测值)
其中的 E(x|I) 是能量函数,为了简便,以下省略全局观测 I :
其中的一元势函数 ∑iΨu(xi) 即来自于前端FCN的输出。而二元势函数如下:
二元势函数就是描述像素点与像素点之间的关系,鼓励相似像素分配相同的标签,而相差较大的像素分配不同标签,而这个“距离”的定义与颜色值和实际相对距离有关。所以这样CRF能够使图片尽量在边界处分割。而全连接条件随机场的不同就在于,二元势函数描述的是每一个像素与其他所有像素的关系,所以叫“全连接”。
关于这一堆公式大家随意理解一下吧… …而直接计算这些公式是比较麻烦的(我想也麻烦),所以一般会使用平均场近似方法进行计算。而平均场近似又是一堆公式,这里我就不给出了(我想大家也不太愿意看),原意了解的同学直接看论文吧。
CRFasRNN
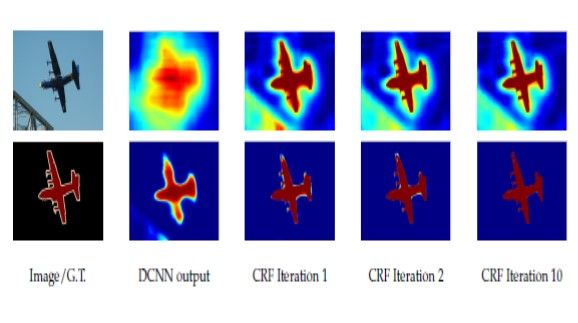
最开始使用DenseCRF是直接加在FCN的输出后面,可想这样是比较粗糙的。而且在深度学习中,我们都追求end-to-end的系统,所以CRFasRNN这篇文章将DenseCRF真正结合进了FCN中。这篇文章也使用了平均场近似的方法,因为分解的每一步都是一些相乘相加的计算,和普通的加减(具体公式还是看论文吧),所以可以方便的把每一步描述成一层类似卷积的计算。这样即可结合进神经网络中,并且前后向传播也不存在问题。当然,这里作者还将它进行了迭代,不同次数的迭代得到的结果优化程度也不同(一般取10以内的迭代次数),所以文章才说是as RNN。优化结果如下:
马尔科夫随机场(MRF)
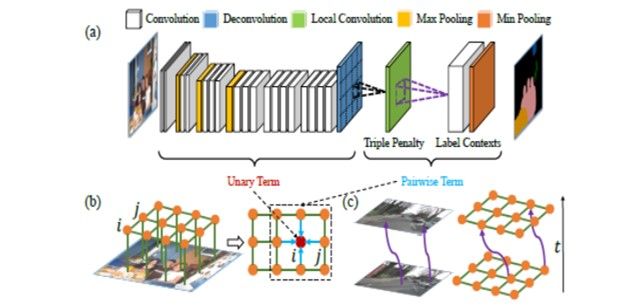
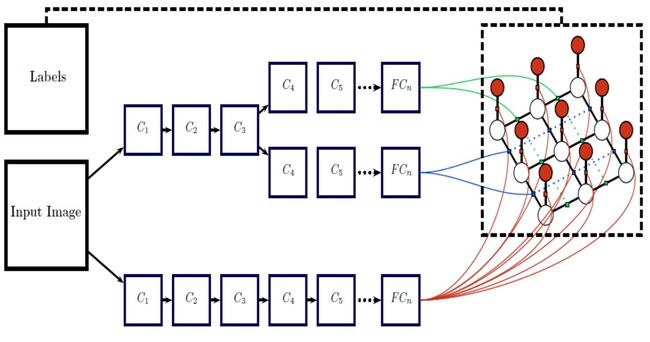
在Deep Parsing Network中使用的是MRF,它的公式具体的定义和CRF类似,只不过作者对二元势函数进行了修改:
其中,作者加入的 λk 为label context,因为 uk 只是定义了两个像素同时出现的频率,而 λk 可以对一些情况进行惩罚,比如,人可能在桌子旁边,但是在桌子下面的可能性就更小一些。所以这个量可以学习不同情况出现的概率。而原来的距离 d(i,j) 只定义了两个像素间的关系,作者在这儿加入了个triple penalty,即还引入了 j 附近的 z ,这样描述三方关系便于得到更充足的局部上下文。具体结构如下:
这个结构的优点在于:
- 将平均场构造成了CNN
- 联合训练并且可以one-pass inference,而不用迭代
高斯条件随机场(G-CRF)
这个结构使用CNN分别来学习一元势函数和二元势函数。这样的结构是我们更喜欢的:
而此中的能量函数又不同于之前:
而当 (A+λI) 是对称正定时,求 E(x) 的最小值等于求解:
而G-CRF的优点在于:
- 二次能量有明确全局
- 解线性简便很多
感悟
- FCN更像一种技巧。随着基本网络(如VGG, ResNet)性能的提升而不断进步。
- 深度学习+概率图模型(GPM)是一种趋势。其实DL说白了就是进行特征提取,而GPM能够从数学理论很好的解释事物本质间的联系。
- 概率图模型的网络化。因为GPM通常不太方便加入DL的模型中,将GPM网络化后能够是GPM参数自学习,同时构成end-to-end的系统。
完结撒花
引用
[1]Fully Convolutional Networks for Semantic Segmentation
[2]Learning Deconvolution Network for Semantic Segmentation
[3]SegNet
[4]Efficient Inference in Fully Connected CRFs with Gaussian Edge Potentials
[5]Semantic Image Segmentation with Deep Convolutional Nets and Fully Connected CRFs
[6]Conditional Random Fields as Recurrent Neural Networks
[7]DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution,
and Fully Connected CRFs
[8]Semantic Image Segmentation via Deep Parsing Network
[9]Fast, Exact and Multi-Scale Inference for Semantic Image Segmentation with
Deep Gaussian CRFs