【常用算法】KDTree,局部敏感哈希LSH,在基于最近邻的算法中,当N特别大的时候(TODO)
基于最近邻的算法,在各种情况下经常使用,
比如10万个用户,对每一个用户分别查找最相似的用户,
当N特别大的时候,效率就不是很高,比如当N=10^5,时已经不太好算了,因为暴力法时间复杂度为O(N^2)。
故需要特殊的手段,这里有两个常用的方法, 一个是KDT树(还有Ball Tree),一个是局部敏感哈希(近似算法,得到得是满足一定置信区间的结果)
KDT: O(N*longN)
局部敏感哈希(LSH):跟桶大小有关
1# K-Dimensional Tree,KDT, https://en.wikipedia.org/wiki/K-d_tree
用原始样本构造一棵二叉树,
第deep层用第deep % p个特征进行样本划分空间,最后得到一个二叉树,查找的时候依据一定的规则可以实现平均logN的时间复杂度,(跟树挂钩的基本都是logN),
如图:

// TODO
由于之前理解得不是很好,所以写了挺久才实现了。
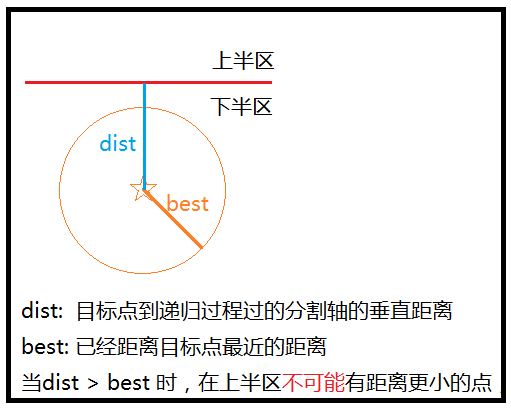
其实核心就是,目标点,到划分轴的距离 >= 当前最小距离,则最小距离不可能在另一半区,所以可以剪枝
即:
样例:
坐标点:{{7,7},{3,4},{5,3},{1,9},{8,3},{8,2},{10,10}};
目标点:6.5,1

查找过程:

KDT代码:
伪代码:
// 根节点指针, 到目前点的所有特征点,深度(轴)
void insert(Node* &root, vector xList, int deep) {
// 当前节点为空,则新建一个节点单位,即当前界面+左右孩子节点空指针
// 拿到x数组,deep轴的中位数
// 把所有点xList划分,median的给右边
// 分到的点数不为0个,则往相应方向递归插入
}
// 根结点指针,目标点,当前最优,深度(轴)
float query(Node* root, Point p, float best, int deep) {
// 递归三部曲
// 终止处理
// 调用递归
// 向上维护
// 递归三部曲(1),终止处理
// 当前节点为空,则返回无穷大
// 当前节点左右孩子都为空,即为叶子节点,则计算距离,并返回改距离
// 递归三部曲(2), 向下调用递归,即考虑的时候把query作为一个已知结果考虑
// 根据第deep轴判断,向左还是向右递归调用
// <向左,>向右
// 递归三部曲(3), 用递归得到的结果进行当前层处理,即向上维护,回溯
// 计算目标点和当前节点的距离
// 判断以目标点到当前分位垂直线的距离是否 <= 当前最小距离
// 若<,则以当前节点的另一个孩子作为跟节点递归调用。
// 若>, 则不扩展另个孩子,因为在另一边不可能有更小距离的,************************************************剪枝发生在这里
// 求到当前的距离,左子树最优结果,右子树最优结果,的最小值
// return 最小的距离
} 实现:
#include
#include
#include
#include
#include
using namespace std;
#define MAXDIST ~(1 << 31)
int countKDT = 0;
struct Point {
float x[2];
};
struct Node { // 结构体里的数据大小必须是确定的,故vector只能用指针
vector* xList;
Node* l;
Node* r;
};
// 根据x排序
bool cmp0(const Point p1, const Point p2) { // sort(xList.begin(), xList.end(), cmp0);
return p1.x[0] < p2.x[0];
}
// 根据y排序
bool cmp1(const Point p1, const Point p2) { // sort(xList.begin(), xList.end(), cmp1);
return p1.x[1] < p2.x[1];
}
// 计算两点距离
float getDist(Point p1, Point p2) {
if (p1.x[0] == p2.x[0] && p1.x[1] == p2.x[1]) return MAXDIST;
return sqrt((p1.x[0] - p2.x[0]) * (p1.x[0] - p2.x[0]) + (p1.x[1] - p2.x[1]) * (p1.x[1] - p2.x[1]));
}
// O(n)时间复杂度求中位数
float getMedian(vector a, int l, int r, int k, int deep) {
// printf("l = %d, r = %d, k = %d\n", l, r, k);
if (l == r && k == 0) return a[l].x[deep];
int pl = l;
int pr = r;
int tmp = a[l].x[deep];
while (pl < pr) {
while (pl < pr && a[pr].x[deep] > tmp) pr--;
if (pl >= pr) break;
a[pl++].x[deep] = a[pr].x[deep];
while (pl < pr && a[pl].x[deep] < tmp) pl++;
if (pl >= pr) break;
a[pr--].x[deep] = a[pl].x[deep];
}
a[pl].x[deep] = tmp;
if(pl - l == k) return tmp;
if(pl - l > k) {
return getMedian(a, l, pl - 1, k, deep);
} else {
return getMedian(a, pl + 1, r, k - (pl - l + 1), deep);
}
}
// 建立KDTree
void insert(Node* &root, vector xList, int deep) {
int i;
int mid = xList.size() >> 1;
if (root == NULL) {
root = (Node*)malloc(sizeof(Node));
root->l = NULL;
root->r = NULL;
}
vector cur;
vector left;
vector right;
float median;
// 排序的方法拿到中位数
if (deep == 0) {
sort(xList.begin(), xList.end(), cmp0);
} else if (deep == 1) {
sort(xList.begin(), xList.end(), cmp1);
}
median = xList[mid].x[deep];
// 基于快排的思想拿到快排
//median = getMedian(xList, 0 , xList.size() - 1, mid, deep);
for (i = 0; i < xList.size(); i++) {
if (xList[i].x[deep] == median) {
cur.push_back(xList[i]);
} else if (xList[i].x[deep] < median) {
left.push_back(xList[i]);
} else {
right.push_back(xList[i]);
}
}
/*
//printf("====1===\n");
for (i = 0; i < left.size(); i++) {
printf("%d, %d\n", left[i]);
}
for (i = 0; i < cur.size(); i++) {
printf("mid: %d, %d\n", cur[i]);
}
for (i = 0; i < right.size(); i++) {
printf("%d, %d\n", right[i]);
}
//printf("====2===\n");
*/
// root->xList = cur;
root->xList = new vector; // (vector*)malloc(vector); 报错,因为vector大小未知
for (i = 0; i < cur.size(); i++) {
(*(root->xList)).push_back(cur[i]);
}
if (left.size() > 0) {
insert(root->l, left, (deep + 1) % 2);
}
if (right.size() > 0) {
insert(root->r, right, (deep + 1) % 2);
}
}
// 打印树
void showTree(Node* root) {
if(root == NULL) return;
printf("\nL: ");
showTree(root->l);
int i;
printf("\nM: ");
for (i = 0; i < (*(root->xList)).size(); i++) {
printf("%.2f, %.2f\n", (*(root->xList))[i].x[0], (*(root->xList))[i].x[1]);
}
printf("\nR: ");
showTree(root->r);
}
// 查找最近
float query(Node* root, Point p, float best, int deep) {
if (root == NULL) return MAXDIST;
//printf("\ncur x = %.2f,%.2f, best = %.2f, deep = %d\n", (*(root->xList))[0].x[0], (*(root->xList))[0].x[1], best, deep);
//printf("lc = %d, rc = %d\n", root->l, root->r);
int i, j;
float dist;
if (root->l == NULL && root->r == NULL) {
//printf("leaf node \n");
for (i = 0; i < (*(root->xList)).size(); i++) {
countKDT++;
dist = getDist((*(root->xList))[i], p);
best = dist < best ? dist : best;
}
//printf("best = %f\n", best);
return best;
}
// left or right
if (p.x[deep] <= (*(root->xList))[0].x[deep]) {
//printf("lll \n");
best = query(root->l, p, best, (deep + 1) % 2);
} else {
//printf("rrr \n");
best = query(root->r, p, best, (deep + 1) % 2);
}
// cur
for (i = 0; i < (*(root->xList)).size(); i++) {
countKDT++;
dist = getDist((*(root->xList))[i], p);
best = dist < best ? dist : best;
}
// another side
if (best >= fabs(p.x[deep] - (*(root->xList))[0].x[deep])) {
float distAnother = MAXDIST;
if (p.x[deep] <= (*(root->xList))[0].x[deep]) {
//printf("another rrr \n");
distAnother = query(root->r, p, best, (deep + 1) % 2);
} else {
//printf("another lll \n");
distAnother = query(root->l, p, best, (deep + 1) % 2);
}
if (distAnother < best) {
best = distAnother;
}
}
return best;
}
float a[][2] = {{7,7},{3,4},{5,3},{1,9},{8,3},{8,2},{10,10}}; // p = 6.5, 1
// float a[][2] = {{2,3}, {5,4}, {9,6}, {4,7}, {8,1}, {7,2}}; //
int main() {
int i, n;
n = 200000;
// 建立KDTree
Node* root = NULL;
vector xList;
for (i = 0; i < n; i++) {
Point p;
p.x[0] = rand() % n;
p.x[1] = rand() % n;
//p.x[0] = a[i][0];
//p.x[1] = a[i][1];
xList.push_back(p);
//if(i==0)
//printf("%.2f,%.2f ", p.x[0], p.x[1]);
} //printf("\n");
clock_t t1 = clock();
insert(root, xList, 0);
clock_t t2 = clock();
printf("build KDT time = %d\n", t2 - t1);
//showTree(root);
//printf("==================================== end of tree\n");
// KDT 搜索
Point p;
p.x[0] = 7;
p.x[1] = 7;
float best = MAXDIST;
float ans = MAXDIST;
int deep = 0;
t1 = clock();
for (i = 0; i < xList.size(); i++) {
p = xList[i];
best = query(root, p, MAXDIST, deep);
ans = ans < best ? ans : best;
}
printf("kdtree best = %f\n", best);
printf("countKDT = %d\n", countKDT);
t2 = clock();
printf("KDT time = %d\n", t2 - t1);
// 暴力法
/*
t1 = clock();
float best2 = MAXDIST;
int count2 = 0;
for (int j = 0; j < n; j++) {
p = xList[j];
best2 = MAXDIST;
for (i = 0; i < n; i++) {
count2++;
float dist2 = getDist(p, xList[i]);
if (dist2 < best2) {
best2 = dist2;
}
}
}
printf("O(n): best2 = %f\n", best2);
t2 = clock();
printf("O(n) time = %d\n", t2 - t1);
printf("%d\n", count2);
*/
return 0;
}
/*
n = 10^4 时,
对每一个点求其最近距离的点
KDT:
O(nlogn)
KDT build time = 102ms
KDT time = 25ms
exe count = O(nlogn) = 24 * 10^4
暴力法:
O(n^2)
time = 4351
exe count = O(n^2) = 10^8
*/ 2# Locality-sensitive hashing,LSH, https://en.wikipedia.org/wiki/Locality-sensitive_hashing
局部敏感哈希其实是一种桶方法,核心思想是当两个样本的相似度比较近的时候,这两个样本更有可能掉到同一个桶里面。
其中有2个要求:
similarity(x1, x2) <= sim1 时,>=p1(大,例如0.95) 的概率使得x1,x2在同一个桶里面
similarity(x1, x2) > sim2 时,< p2 (小,例如0.05) 的概率使得x1,x2掉在同一个桶里
所以和一般使用的hash函数思想不一样,一般的hash函数希望每个样本hash后尽量的分开,而这里的hash则希望近的样本hash到一个桶里
// TODO