Linux 设备树学习——基于i2c总线分析
Linux 设备树——基于i2c总线分析
- 博客说明
- 开发环境
- 1. 如何使用设备树
- 1.1 u-boot支持设备树
- 1.2 Linux内核支持设备树
- 1.3 如何在开发板中使用设备树
- 2. 设备树介绍
- 2.1 设备树中的设备驱动节点
- 2.2 设备树匹配流程
- 2.2.1 以i2c匹配为例
- 2.2.2 设备树匹配下的程序模板
- 2.3 设备树中的设备节点转换
- 附录
- 参考资料
博客说明
| 撰写日期 | 2019.11.18 |
|---|---|
| 完稿日期 | 2019.11.20 |
| 最近维护 | 暂无 |
| 本文作者 | multimicro |
| 联系方式 | [email protected] |
| 资料链接 | 本文无附件资料 |
| GitHub | https://github.com/wifialan/drivers/tree/master/device_tree_i2c |
| 原文链接 | https://blog.csdn.net/multimicro/article/details/103129546 |
开发环境
| 环境说明 | 详细信息 | 备注信息 |
|---|---|---|
| 操作系统 | Ubunut 18.04 | |
| 开发板 | JZ2440-V3 | |
| u-boot | uboot-2012.04.01 | |
| busybox | busybox-1.22.1 | |
| u-boot和busybox编译器 | arm-linux-gcc (4.4.3) | |
| Linux内核 | linux-4.19-rc3 | |
| Linux内核编译器 | arm-linux-gnueabi-gcc (4.9.4) |
1. 如何使用设备树
设备树,顾名思义,是描述物理设备的文件,里面的节点包含特定设备下的硬件信息。使用设备树,需要做两方面工作:其一,开启u-boot支持设备树的功能;其二:使用支持设备树的内核版本。
1.1 u-boot支持设备树
-
在u-boot工程中,增添一行命令在板级配置文件中:
#define CONFIG_OF_LIBFDT
我用的是S3C2440,所以应该在include/configs/smdk2440.h中增添上述命令行,然后重新编译即可得到支持设备树的u-boot。 -
在u-boot启动过程中,在把控制权交给内核前,会对内存进行分区,那么因此,也需要让u-boot启动时,为设备树分配一定的内存空间,具体操作是:
继续修改include/configs/smdk2440.h文件,在里面这个位置增加图示代码:

重新编译,烧录,在u-boot命令行中输入mtdparts即可查看分区情况
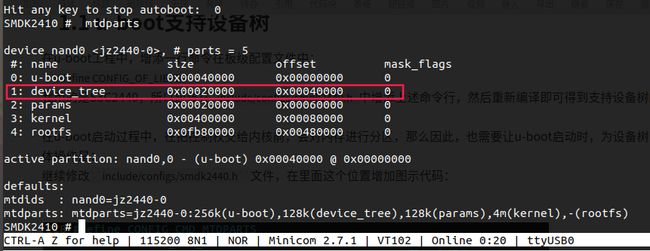
这就在之前的u-boot基础上得到了一个支持设备树的u-boot,可以在对应的内存空间中烧写相应的文件。
1.2 Linux内核支持设备树
我使用的是韦东山提供的Linux内核以及补丁包,采用Linux-4.19.3-rc内核版本。
打补丁:
patch -p1<../linux-4.19-rc3_device_tree_for_jz2440.patch
编内核:
cp config_ok .config
make ARCH=arm CROSS_COMPILE=/opt/FriendlyARM/toolschain/4.9.4/bin/arm-linux-gnueabi- menuconfig
make ARCH=arm CROSS_COMPILE=/opt/FriendlyARM/toolschain/4.9.4/bin/arm-linux-gnueabi- uImage -j8
make ARCH=arm CROSS_COMPILE=/opt/FriendlyARM/toolschain/4.9.4/bin/arm-linux-gnueabi- dtbs -j8
执行完后,会在arch/arm/boot/文件夹下得到uImage,在arch/arm/boot/dts/文件夹下得到*.dtb
1.3 如何在开发板中使用设备树
为了减少学习时对开发板的FLASH擦写,这里一直使用tftp服务将内核和设备树文件的直接传递给内存中运行,而u-boot和文件系统busybox则固化在FLASH中,从Linux-3.4.2过渡过来的busybox可以直接使用,但需要提醒一下,之前的busybox是在第三分区,而增加设备树分区后的busybox被挪到了第四分区:

因此,在bootargs命令中,应该修改root挂载到/dev/mtdblock4分区下
set bootargs console=ttySAC0,115200 root=/dev/mtdblock4 rw init=/linuxrc
现在开始通过tftp服务加载内核和设备树,tftp服务器搭建参考:在Linux系统下通过TFTP或NFS烧写内核
在u-boot命令行中输入:
tftp 31000000 uImage; tftp 32000000 jz2440_irq.dtb; bootm 31000000 - 32000000
bootm 命令介绍,若ramdisk没有,则用"-"号替代
bootm + uImage地址 + ramdisk地址 + 设备树镜像地址
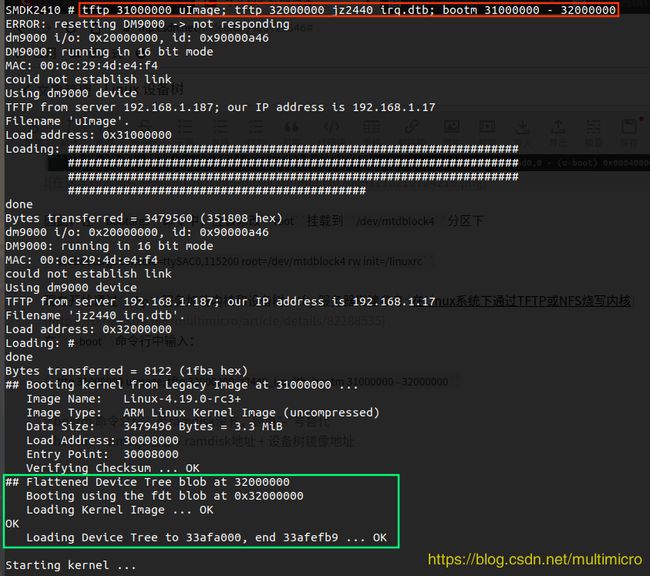
可以看到,设备树已经成功被uImage加载。
2. 设备树介绍
-
Linux uses DT data for three major purposes:
1) platform identification,
2) runtime configuration, and
3) device population. -
我用设备树主要是方便其加载硬件设备信息,不需要在内核中增加比如
spi_register_board_info这样的设备注册函数,通过重新编译内核来实现device的注册。现在在利用设备树时,若增加某个设备,那么只需要修改设备树中的相关信息,那么重新编译设备树让内核重新加载,即可便捷的注册某device。非设备树注册device可参考spi_device的注册过程: 2.2 spi_device注册 -
在根文件系统中查看设备树(有助于调试)
a./sys/firmware/fdt// 原始dtb文件
hexdump -C /sys/firmware/fdt//查看dtb文件内容
b./sys/firmware/devicetree// 以目录结构程现的dtb文件, 根节点对应base目录, 每一个节点对应一个目录, 每一个属性对应一个文件
c./sys/devices/platform// 系统中所有的platform_device, 有来自设备树的, 也有来有.c文件中注册的
对于来自设备树的platform_device, 可以进入 /sys/devices/platform/<设备名>/of_node 查看它的设备树属性
d./proc/device-tree是链接文件, 指向 /sys/firmware/devicetree/base
2.1 设备树中的设备驱动节点
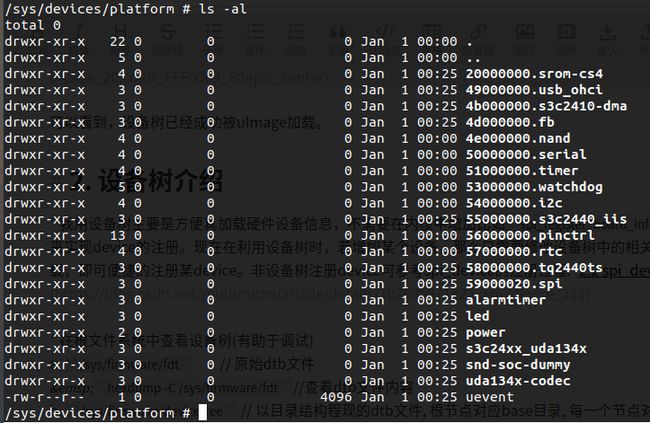
- sys/devices/platform/
在sys/devices/platform/文件夹下面可以看到通过设备树注册进来的根设备(子设备都在根设备文件夹内的of_node文件夹下):
进入其中一个文件夹,如54000000.i2c可以看到一个文件夹of_node,里面包含了i2c节点下的子节点设备信息:
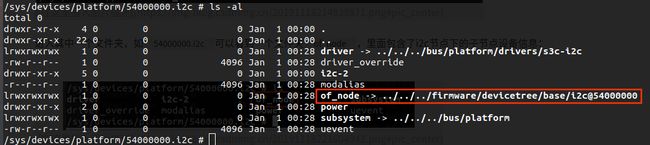
红框中of_node被链接到了/sys/firmware/devicetree/base/i2c@54000000/文件夹下(由此也验证,设备树中的所有信息都在/sys/firmware/devicetree/base文件夹里面),那么该文件夹中信息有那些呢?
- sys/firmware/devicetree/base
tree命令: 将tree源码交叉编译后的文件放到busybox下的
/bin/文件夹下方可使用
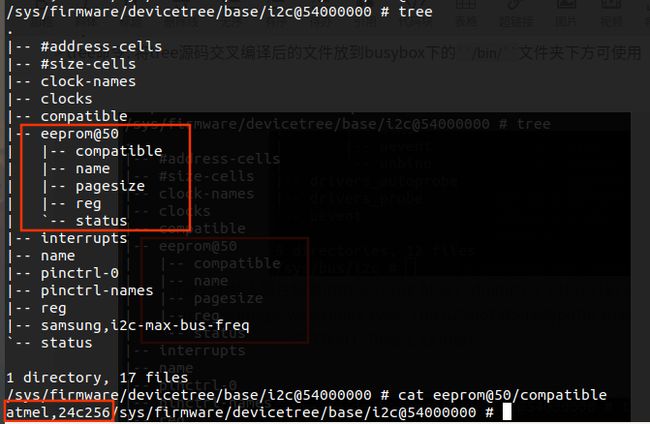
设备树中,i2c节点下的设备子节点信息如下:
通过上述两张图,可以看出eeprom设备节点被成功加载到了内核中去,其依附于i2c设备。现在想想,树状关系是不是有点雏形了,一个根设备(i2c)下面伸出了一个枝干(eeprom)。
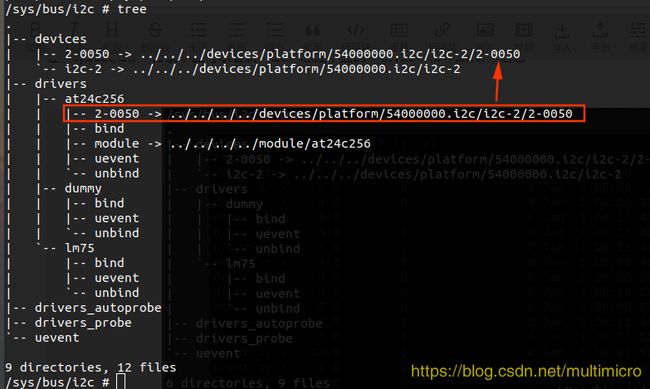
- sys/bus/i2c/
设备树注册进来的总线设备,可以在sys/bus/文件夹下找到,比如i2c、spi总线等
在sys/bus/i2c/目录下面可以看到i2c总线下面的device和driver信息
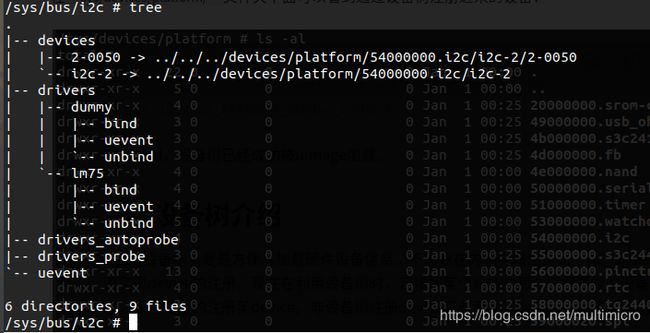
若内核中注册了相应的i2c drivers,那么通过名字匹配成功后(具体的匹配方式下面会写),会调用相应的probe函数将driver和device连在一起
2.2 设备树匹配流程
通过设备树注册进来的device,是如何匹配到对应的driver呢,本节仍然以i2c总线的匹配为例进行介绍。
spi总线和platform总线也是类似的,本节结尾我会贴出这两个总线的匹配程序供参考,会发现,这玩意儿,就是一通百通。
2.2.1 以i2c匹配为例
i2c中的匹配函数在如下文件内
drivers/i2c/i2c-core-base.c : line 101
static int i2c_device_match(struct device *dev, struct device_driver *drv)
{
struct i2c_client *client = i2c_verify_client(dev);
struct i2c_driver *driver;
/* Attempt an OF style match */
if (i2c_of_match_device(drv->of_match_table, client))
return 1;
/* Then ACPI style match */
if (acpi_driver_match_device(dev, drv))
return 1;
driver = to_i2c_driver(drv);
/* Finally an I2C match */
if (i2c_match_id(driver->id_table, client))
return 1;
return 0;
}
从上述流程中可以得知,通过调用i2c_device_match函数实现i2c设备和驱动的匹配,匹配流程为:
下面也是匹配的优先顺序
-
1st: /* Attempt an OF style match */
设备树中i2c子设备节点下的compatible属性值和内核驱动程序中所定义的
of_device_id结构体中的compatible属性值 是否完全相同,在linux-4.19-rc3内核版本中,采用of_compat_cmp函数(原型为strcasecmp函数,由drivers/of/base.c :line454: __of_device_is_compatible调用)来匹配两个值是否相同 -
2nd: /* Then ACPI style match */
设备树不涉及这种匹配方式,忽略
-
3rd: /* Finally an I2C match */
设备树不涉及这种匹配方式,但此种方式是在没有采用设备树时的匹配方式:
platform_device结构体定义的.name字段(至于怎么传入client先留个疑问)和 驱动程序中所定义的i2c_device_id结构体中的.name字段属性值是否完全相同,在linux-4.19-rc3内核版本中,采用i2c_match_id函数(drivers/i2c/i2c-core-base.c :line86)来匹配两个值是否相同
下面举例介绍一下设备树中驱动的匹配
- /* Attempt an OF style match */
如下将at24_of_match定义为了一个of_device_id结构体,里面包含compatible属性,和设备树中子设备节点下的compatible属性值进行匹配。倘若设备树中子设备节点eeprom@50中compatible = "atmel,24c256",那么就会匹配成功,调用probe函数
driver端 内核程序
static const struct of_device_id at24_of_match[] = {
{ .compatible = "atmel,24c00", .data = &at24_data_24c00 },
{ .compatible = "atmel,24c01", .data = &at24_data_24c01 },
{ .compatible = "atmel,24cs01", .data = &at24_data_24cs01 },
... //此处省略了一部分
{ .compatible = "atmel,24c256", .data = &at24_data_24c256 },
{ .compatible = "atmel,24c512", .data = &at24_data_24c512 },
{ .compatible = "atmel,24c1024", .data = &at24_data_24c1024 },
{ /* END OF LIST */ },
};
device端 设备树程序
-
/* Finally an I2C match */
对比通过内核注册
i2c device,匹配方式
driver端 内核程序
static const struct i2c_device_id at24_ids[] = {
{ "24c00", (kernel_ulong_t)&at24_data_24c00 },
{ "24c01", (kernel_ulong_t)&at24_data_24c01 },
{ "24cs01", (kernel_ulong_t)&at24_data_24cs01 },
... //此处省略了一部分
{ "24c256", (kernel_ulong_t)&at24_data_24c256 },
{ "24c512", (kernel_ulong_t)&at24_data_24c512 },
{ "24c1024", (kernel_ulong_t)&at24_data_24c1024 },
{ "at24", 0 },
{ /* END OF LIST */ }
};
device端 内核程序
static struct i2c_board_info __initdata da830_evm_i2c_devices[] = {
{
I2C_BOARD_INFO("24c256", 0x50),
.platform_data = &da830_evm_i2c_eeprom_info,
},
};
- 附
spi总线和platform总线的匹配程序
spi总线drivers/spi/spi.c
static int spi_match_device(struct device *dev, struct device_driver *drv)
{
const struct spi_device *spi = to_spi_device(dev);
const struct spi_driver *sdrv = to_spi_driver(drv);
/* Attempt an OF style match */
if (of_driver_match_device(dev, drv))
return 1;
/* Then try ACPI */
if (acpi_driver_match_device(dev, drv))
return 1;
if (sdrv->id_table)
return !!spi_match_id(sdrv->id_table, spi);
return strcmp(spi->modalias, drv->name) == 0;
}
platform总线drivers/base/platform.c
static int platform_match(struct device *dev, struct device_driver *drv)
{
struct platform_device *pdev = to_platform_device(dev);
struct platform_driver *pdrv = to_platform_driver(drv);
/* When driver_override is set, only bind to the matching driver */
if (pdev->driver_override)
return !strcmp(pdev->driver_override, drv->name);
/* Attempt an OF style match first */
if (of_driver_match_device(dev, drv))
return 1;
/* Then try ACPI style match */
if (acpi_driver_match_device(dev, drv))
return 1;
/* Then try to match against the id table */
if (pdrv->id_table)
return platform_match_id(pdrv->id_table, pdev) != NULL;
/* fall-back to driver name match */
return (strcmp(pdev->name, drv->name) == 0);
}
韦东山在设备树视频里面讲解的匹配流程就是基于platform总线的,见下图(单击放大后观看),而i2c总线和spi总线的匹配优先级方式可以根据各自对应的源码分析。现在再看这张图,理解的会更上一层楼。i2c总线和spi总线的匹配结构也可以仿照这张图绘制出来
2.2.2 设备树匹配下的程序模板
下面梳理一下i2c总线的device注册和driver注册以及匹配程序流程,spi总线和platform总线流程也基本都是一个套路,学会一个,其他的就会很好理解了。
-
设备树端
代码在git上:jz2440_irq.dts
在设备树
dts文件中的i2c总线节点下面,创建一个新的子设备节点(eeprom@50),需要注意的是,通过设备树注册的i2c设备会转换为一个i2c client,不像spi设备会转换为一个spi device。
- compatible 的值是用于和driver匹配的
- reg 的值是相应的寄存器
- status = "okay"是启用该设备
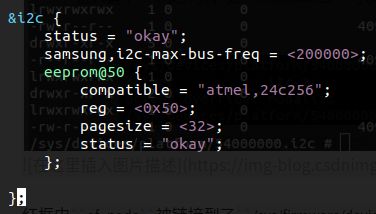
dts文件:
&i2c {
status = "okay";
samsung,i2c-max-bus-freq = <200000>;
eeprom@50 {
compatible = "atmel,24c256";
reg = <0x50>;
pagesize = <32>;
status = "okay";
};
};
下面是上述dts文件中所包含的dtsi文件里面的i2c设备节点信息,之所以可以用&i2c,就是因为在dtsi文件(见下)中将i2c@54000000这个i2c节点前记了一个标识符i2c,这种标识符的格式为:i2c: i2c@54000000。采用此标识符下的属性信息可以覆盖原有的属性,并可以增加新的属性信息在其中。
dtsi文件
i2c: i2c@54000000 {
compatible = "samsung,s3c2440-i2c";
clocks = <&clocks PCLK_I2C>;
clock-names = "i2c";
pinctrl-names = "default";
pinctrl-0 = <&i2c0_bus>;
};
- 内核driver端
static const struct of_device_id xxx_of_match[] = {
{ .compatible = "atmel,24c256", .data = &xxx_data },
... //还可以增加其他设备信息 .data字段暂时不知道作用,匹配是用不到这个属性了
{ /* END OF LIST */ },
};
MODULE_DEVICE_TABLE(of, xxx_of_match);
static int xxx_probe(struct i2c_client * client, const struct i2c_device_id *id)
{
... //在这里可以将i2c设备注册为字符设备或者misc设备使用
}
static int xxx_remove(struct i2c_client *client)
{
...
}
static struct i2c_driver xxx_driver = {
.driver = {
.name = "at24c256",
.owner = THIS_MODULE,
.of_match_table = xxx_of_match, //设备树注册i2c device匹配方式选用
},
.probe = xxx_probe,
.remove = xxx_remove,
.id_table = xxx_ids, //内核注册i2c device匹配方式选用
};
static int __init xxx_init(void)
{
return i2c_add_driver(&xxx_driver);
}
static void __exit xxx_exit(void)
{
i2c_del_driver(&xxx_driver);c
}
module_init(xxx_init);
module_exit(xxx_exit);
2.3 设备树中的设备节点转换
文本内容较多,移步至github: device_tree_node_transfer
i2c节点和spi节点是如何转换为相应的i2c client和spi device的呢?
/i2c节点一般表示i2c控制器, 它会被转换为platform_device, 在内核中有对应的platform_driver;
/i2c/at24c02节点不会被转换为platform_device, 它被如何处理完全由父节点的platform_driver决定, 一般是被创建为一个i2c_client。
类似的也有/spi节点, 它一般也是用来表示SPI控制器, 它会被转换为platform_device, 在内核中有对应的platform_driver;
/spi/flash@0节点不会被转换为platform_device, 它被如何处理完全由父节点的platform_driver决定, 一般是被创建为一个spi_device。
详细流程参考github上文本内容
附录
- GitHub:device_tree_i2c
参考资料
- 让u-boot支持内核设备树dts