《SLAM十四讲》第二讲讲后作业
文章目录
- 一、熟悉Eigen矩阵运算
- 二、几何运算练习
- 三、罗德里格斯公式的证明
一、熟悉Eigen矩阵运算
Eigen(http://eigen.tuxfamily.org)是常用的C++ 矩阵运算库,具有很搞的运算效率。大部分需要在C++ 中使用矩阵运算的库,都会选用Eigen 作为基本代数库,例如Google Tensorflow,Google、Ceres,GTSAM 等。本次习题,你需要使用Eigen 库,编写程序,求解一个线性方程组。为此,你需要先了解一些有关线性方程组数值解法的原理。
设线性方程Ax = b,在A 为方阵的前提下,请回答以下问题:
- 在什么条件下,x 有解且唯一?
- 高斯消元法的原理是什么?
- QR 分解的原理是什么?
- Cholesky 分解的原理是什么?
- 编程实现A 为100 X100 随机矩阵时,用QR 和Cholesky 分解求x 的程序。
解答:
1、非齐次线性方程在A的秩:R(A)与[A|B]的秩:R(A,B)相同时方程有解,即为:R(A)=R(A,B)=n时方程有唯一解。
2、高斯消元法的原理是什么?
原理:高斯消元法的作用是又来求解线性方程组的解,其原理是将方程组进行加减消元,然后求出未知数X。
3、QR 分解的原理是什么?
原理:将一个稀疏矩阵分解成一个正交矩阵和一个上三角矩阵A=QR, A左乘一个Householder反射矩阵Hj, Hn…H2H1A=QTA=[R 0]T
4、Cholesky 分解的原理是什么?
与SLAM问题相关的优化问题,可以很简洁的用稀疏线性代数的方式表达,要么将信息矩阵分解为平方根的形式,要么将观测雅可比矩阵A分解为平方根。原理:乔利斯基分解通过求解正规方程,然后分解信息矩阵得到一种对称正定矩阵(LU分解的百变种)得到一个nn的上三角形矩阵。A=LLT。
5、编程实现A 为100 X100 随机矩阵时,用QR 和Cholesky 分解求x 的程序。
#include二、几何运算练习
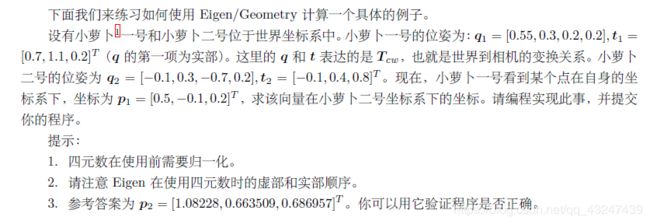
解答:
#include
证明:
参考链接:https://www.cnblogs.com/indulge-code/p/10492209.html
https://www.cnblogs.com/liuhuacai/p/12093770.html