opencv学习之findcounters 寻找轮廓
先上源代码
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include
using namespace cv;
using namespace std;
int main()
{
const char* inputImage = "rice.tif";
Mat img;
int threshval =100;
img = imread(inputImage,0);
if (img.empty())
{
cout << "Could not read input image file: " << inputImage << endl;
return -1;
}
img = img >110;
namedWindow("Img", 1);
imshow("Img", img);
vector
vector
Mat dst = Mat::zeros(img.rows, img.cols, CV_8UC3);
findContours(img, contours,hierarchy, CV_RETR_CCOMP, CV_CHAIN_APPROX_SIMPLE);
if( !contours.empty() && !hierarchy.empty() )
{
int idx = 0;
for( ; idx >= 0; idx = hierarchy[idx][0] )
{
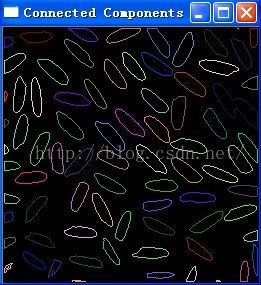
Scalar color( (rand()&255), (rand()&255), (rand()&255) );
drawContours( dst, contours, idx, color, 1, 8, hierarchy );
}
}
namedWindow("Connected Components", 1);
imshow( "Connected Components", dst );
waitKey(0);
return 0;
opencv查找轮廓的函数很多,下面部分函数及参数说明如下:
转自http://control.blog.sina.com.cn/admin/article/article_edit.php?blog_id=662c78590100z0rg
findContours函数,这个函数的原型为:
void findContours(InputOutputArray image, OutputArrayOfArrays contours, OutputArray hierar-
chy, int mode, int method, Point offset=Point())
参数说明
输入图像image必须为一个2值单通道图像
contours参数为检测的轮廓数组,每一个轮廓用一个point类型的vector表示
hiararchy参数和轮廓个数相同,每个轮廓contours[ i ]对应4个hierarchy元素hierarchy[ i ][ 0 ] ~hierarchy[ i ][ 3 ],分别表示后一个轮廓、前一个轮廓、父轮廓、内嵌轮廓的索引编号,如果没有对应项,该值设置为负数。
mode表示轮廓的检索模式
CV_RETR_EXTERNAL表示只检测外轮廓
CV_RETR_LIST检测的轮廓不建立等级关系
CV_RETR_CCOMP建立两个等级的轮廓,上面的一层为外边界,里面的一层为内孔的边界信息。如果内孔内还有一个连通物体,这个物体的边界也在顶层。
CV_RETR_TREE建立一个等级树结构的轮廓。具体参考contours.c这个demo
method为轮廓的近似办法
CV_CHAIN_APPROX_NONE存储所有的轮廓点,相邻的两个点的像素位置差不超过1,即max(abs(x1-x2),abs(y2-y1))==1
CV_CHAIN_APPROX_SIMPLE压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标,例如一个矩形轮廓只需4个点来保存轮廓信息
CV_CHAIN_APPROX_TC89_L1,CV_CHAIN_APPROX_TC89_KCOS使用teh-Chinl chain 近似算法
offset表示代表轮廓点的偏移量,可以设置为任意值。对ROI图像中找出的轮廓,并要在整个图像中进行分析时,这个参数还是很有用的。
findContours后会对输入的2值图像改变,所以如果不想改变该2值图像,需创建新mat来存放,findContours后的轮廓信息contours可能过于复杂不平滑,可以用approxPolyDP函数对该多边形曲线做适当近似
contourArea函数可以得到当前轮廓包含区域的大小,方便轮廓的筛选
findContours经常与drawContours配合使用,用来将轮廓绘制出来。其中第一个参数image表示目标图像,第二个参数contours表示输入的轮廓组,每一组轮廓由点vector构成,第三个参数contourIdx指明画第几个轮廓,如果该参数为负值,则画全部轮廓,第四个参数color为轮廓的颜色,第五个参数thickness为轮廓的线宽,如果为负值或CV_FILLED表示填充轮廓内部,第六个参数lineType为线型,第七个参数为轮廓结构信息,第八个参数为maxLevel
得到了复杂轮廓往往不适合特征的检测,这里再介绍一个点集凸包络的提取函数convexHull,输入参数就可以是contours组中的一个轮廓,返回外凸包络的点集
还可以得到轮廓的外包络矩形,使用函数boundingRect,如果想得到旋转的外包络矩形,使用函数minAreaRect,返回值为RotatedRect;也可以得到轮廓的外包络圆,对应的函数为minEnclosingCircle;想得到轮廓的外包络椭圆,对应的函数为fitEllipse,返回值也是RotatedRect,可以用ellipse函数画出对应的椭圆
如果想根据多边形的轮廓信息得到多边形的多阶矩,可以使用类moments,这个类可以得到多边形和光栅形状的3阶以内的所有矩,类内有变量m00,m10,m01,m20,m11,m02,m30,m21,m12,m03,比如多边形的质心为 x = m10 / m00,y = m01 / m00。
如果想获得一点与多边形封闭轮廓的信息,可以调用pointPolygonTest函数,这个函数返回值为该点距离轮廓最近边界的距离,为正值为在轮廓内部,负值为在轮廓外部,0表示在边界上。
原文转自:http://blog.sina.com.cn/s/blog_662c78590100z0rg.html