最短路径算法
问题描述:
最短路径问题是图论研究中的一个经典算法问题, 旨在寻找图(由结点和路径组成的)中两结点之间的最短路径。
所谓单源最短路径问题是指:已知图G=(V,E),我们希望找出从某给定的源结点S∈V到V中的每个结点的最短路径。
首先,我们可以发现有这样一个事实:如果P是G中从vs到vj的最短路,vi是P中的一个点,那么,从vs沿P到vi的路是从vs到vi的最短路。
首先,我们可以发现有这样一个事实:如果P是G中从vs到vj的最短路,vi是P中的一个点,那么,从vs沿P到vi的路是从vs到vi的最短路。
最常用的路径算法有:Dijkstra算法、A*算法、SPFA算法、Bellman-Ford算法、Floyd-Warshall算法、Johnson算法
以上是参考百度百科,以下分别论述闭包最短通路长度、Dijkstra算法和Floyd算法。
1.闭包最短通路长度
定理:设G是带有相对于顶点顺序 的邻接矩阵A的图。从
的邻接矩阵A的图。从 到
到 的长度为r的不同通路的数目等于
的长度为r的不同通路的数目等于 的第(i,j)项,其中r为正整数。
的第(i,j)项,其中r为正整数。
其证明参考离散数学第六版,9.4.6。要理解这个过程也不难,可以从矩阵乘法原理去理解,从公式 上理解就是(i,j)=(i,k)*(k,j),如果是通路,它自然不为0了,相当于计数了。从这个定理可以看出,我们在计算时,如果(i,j)的值由0变成非0,此时就是两顶点之间通路长度,即需要至少分几段才能连接两点。最典型的应用是换乘次数最少的路径。
上理解就是(i,j)=(i,k)*(k,j),如果是通路,它自然不为0了,相当于计数了。从这个定理可以看出,我们在计算时,如果(i,j)的值由0变成非0,此时就是两顶点之间通路长度,即需要至少分几段才能连接两点。最典型的应用是换乘次数最少的路径。
2.Dijkstra算法
Dijkstra(迪杰斯特拉)算法是典型的单源最短路径算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止。Dijkstra算法是很有代表性的最短路径算法,在很多专业课程中都作为基本内容有详细的介绍,如数据结构,图论,运筹学等等。注意该算法要求图中不存在负权边。
算法思想:设G=(V,E)是一个带权有向图,把图中顶点集合V分成两组,第一组为已求出最短路径的顶点集合(用S表示,初始时S中只有一个源点,以后每求得一条最短路径 , 就将加入到集合S中,直到全部顶点都加入到S中,算法就结束了),第二组为其余未确定最短路径的顶点集合(用U表示),按最短路径长度的递增次序依次把第二组的顶点加入S中。在加入的过程中,总保持从源点v到S中各顶点的最短路径长度不大于从源点v到U中任何顶点的最短路径长度。此外,每个顶点对应一个距离,S中的顶点的距离就是从v到此顶点的最短路径长度,U中的顶点的距离,是从v到此顶点只包括S中的顶点为中间顶点的当前最短路径长度。
算法步骤:
a.初始时,S只包含源点,即S={v},v的距离为0。U包含除v外的其他顶点,即:U={其余顶点},若v与U中顶点u有边,则w正常有权值,若u不是v的出边邻接点,则w权值为∞。同时设每个顶点的最优值在L(u)中,L(vi)=无穷,L(起始点)=0;
b.从U中选取一个距离v最小的顶点k,把k,加入S中(该选定的距离就是v到k的最短路径长度)。
c.以k为新考虑的中间点,修改U中各顶点的距离;若从源点v到顶点u的距离(经过顶点k)比原来距离(不经过顶点k)短,则修改顶点u的距离值,修改后的距离值的顶点k的距离加上边上的权。即L(v)=min(L(v),L(u)+w(u,v))
d.重复步骤b和c直到所有顶点都包含在S中。
a.初始时,S只包含源点,即S={v},v的距离为0。U包含除v外的其他顶点,即:U={其余顶点},若v与U中顶点u有边,则w
b.从U中选取一个距离v最小的顶点k,把k,加入S中(该选定的距离就是v到k的最短路径长度)。
c.以k为新考虑的中间点,修改U中各顶点的距离;若从源点v到顶点u的距离(经过顶点k)比原来距离(不经过顶点k)短,则修改顶点u的距离值,修改后的距离值的顶点k的距离加上边上的权。即L(v)=min(L(v),L(u)+w(u,v))
d.重复步骤b和c直到所有顶点都包含在S中。
理解起来也不是很难,就是从起始点开始,向周边找到最短距离,并记录到每个点,然后找到最短的路重新向周边找且记录。不过对于已经选择的最优点就不要重新计算了。
为什么这么做,就能找出最优解呢,这里可以先看我的另一篇博文《动态规划-钢条切割》。里面提到,如果一个路径是最优到,那路径中的每一个点到终点也是最优的。同样,我们反过来走也是一样的。但这里和那里面又有点不一样,那里面是,一层一层地求最优解,即相隔1,2,3....点这样求,但实际上这没有广泛的适合性,当网络连接相当复杂时,你无法知道一点到另外一点的最优值,即使是相邻,如果你真的已经求出来了,恭喜你,你明白Dijkstra算法的精髓了。
正因为我们时常不能很严格地将图分为一层一层的,所以要找到每一个点的最优解时,理解起来比较困难。那么我们怎么找到一个点的最优解呢,怎么样在不知道其它点的最优值时,求出这个点的最优解呢?其实我们人生也是如此,我们想每个选择都最优,其实很难做到。其实,只要大致方向上是对的,踏踏实实里往前走,时刻调整人生的方向,就能走上人生巅峰,迎娶白富美。这里有三个关键,一是大致方向上是对的,不能南辕北辙,二是踏踏实实,三是时刻调整。对,做到这三点很难做到吧,这个算法就教你怎么做到的。
首先,在起始点找到局部最优解(当然每个相邻点都要计算,你不尝试你怎么知道谁好谁坏呢?所以人生贵在敢于尝试,而且永远都不会忘记这种感觉,因为后面还要用到的),然后定位在那个点,这不难吧。图中标号为2就是,然后以这个点又找到局部最优解,点3。我们就会惊讶发现,原来从点2出发后,转了一圈发现点3又是最优的,说明点2的最优解的探索过程完了,7就是点2的最优解。既然找到了点2的最优解,自然以后就不管它喽,这就是算法中的集合S和U的作用。是吧,在外面转了一图,发现还是点3好,跟谈恋爱一样,虽说初恋不一定很优秀,但是最想念的哈。那我们继续从点3出发找最优解,发现点6是最优的,不过点6已经不是以前的点6了,因为它改了。既然点3不是最优的,说明点3的命运到头了,因为它不能继续保持领先地位,自然要让给下一位,同时点3也完成了自己最优解的使命了。
这样,一步步地就把每个点的最优解求出来了,同时也不需要计算出每个点的所有情况再作比较,只需要证明它周边有比它更优秀的,来说明它不是所要找的最优路径中的点。同时也发现,它再怎么继续转悠,也不可能找到比它现在还小的数。有人就要问,这不是还没更新么,等之前的点更新之后,再反过来找此点,说不定能找到更小的。这看起来挺有道理的,其实不然,在局部的最优解中,其它的点即使是更新了最优值,同样要比此值要小,为什么呢,无论怎么更新,它始终要从它到初始点的最路径,加上某个值才使它进一步小,话说回来,它顶多是从别的点折返回来,就如点6还得从1-3,3-6给折回去,这样一来,怎么可能有1-2直接最优呢。所以呢,当转悠了一圈后,发现周边还有比我们强的,说明我们自己已经是最优的了,不需要去再去折腾了。这个时候,要么把棒子交给下一个人,要自己继续学习,使自己比以前的自己更强大才行,这就是我们平时说的,当才华不能支撑起野心时,是时候安静下来好好学习了。
这里,还说一句,为什么这个算法不适合有负数的权值的呢?很简单,因为它依靠的是最优子序列所推测出来的,所以当存在负数时,这就不适用了。不然好不容易把了个最优的,发现下一个权值是负数,这说明上一个找的不是最优的,这不矛盾吗,是不是哈。
那路径怎么确定呢?L(v)=min(L(v),L(u)+w(u,v)),每一次求每个顶点的最优值,都会产生一个u,即最优点的前一个点,如果这个顶点的值如果后面一直不变,那么它的前驱始终为u,但有改变,则它也改变,所以只要跟踪每一个点的前驱,按图索骥,就可以找到最优路径。
说到这里,大家应该明白为什么要搞集合S和U了吧,下面就是C程序代码:
//path的每个值初始化为-1,后面打印时用的
int dijkstra(int **w,int *path,int n,int begin,int end)
{
begin-=1;end-=1;
int i;
bool *S=new bool[n];//S,L与文章中的意义一样,这里没有U,因为U是S的余集
int *L=new int[n];
for(i=0;i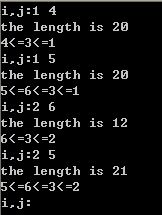
3.Floyd算法
正如大多数教材中所讲到的,求单源点无负边最短路径用Dijkstra,而求所有点最短路径用Floyd。确实,我们将用到Floyd算法,但是,并不是说所有情况下Floyd都是最佳选择。 对于没有学过Floyd的人来说,在掌握了Dijkstra之后遇到All-Pairs最短路径问题的第一反应可能会是:计算所有点的单源点最短路径,不就可以得到所有点的最短路径了吗。简单得描述一下算法就是执行n次Dijkstra算法。
Floyd可以说是Warshall算法的扩展了,三个for循环便可以解决一个复杂的问题,应该说是十分经典的。从它的三层循环可以看出,它的复杂度是n3,除了在第二层for中加点判断可以略微提高效率,几乎没有其他办法再减少它的复杂度。
比较两种算法,不难得出以下的结论:对于稀疏的图,采用n次Dijkstra比较出色,对于茂密的图,可以使用Floyd算法。另外,Floyd可以处理带负边的图。
下面对Floyd算法进行介绍:
Floyd算法的基本思想: 可以将问题分解,先找出最短的距离,然后在考虑如何找出对应的行进路线。如何找出最短路径呢,这里还是用到动态规划的知识,对于任何一个城市而言,i到j的最短距离不外乎存在经过i与j之间的k和不经过k两种可能,所以可以令k=1,2,3,...,n(n是城市的数目),在检查d(ij)与d(ik)+d(kj)的值;在此d(ik)与d(kj)分别是目前为止所知道的i到k与k到j的最短距离,因此d(ik)+d(kj)就是i到j经过k的最短距离。所以,若有d(ij)>d(ik)+d(kj),就表示从i出发经过k再到j的距离要比原来的i到j距离短,自然把i到j的d(ij)重写为d(ik)+d(kj),每当一个k查完了,d(ij)就是目前的i到j的最短距离。重复这一过程,最后当查完所有的k时,d(ij)里面存放的就是i到j之间的最短距离了。这样我们就可以用3个for循环就可以完成了。
for ( int i = 0; i < 节点个数; ++i )
{
for ( int j = 0; j < 节点个数; ++j )
{
for ( int k = 0; k < 节点个数; ++k )
{
if ( Dis[i][k] + Dis[k][j] < Dis[i][j] )
{
// 找到更短路径
Dis[i][j] = Dis[i][k] + Dis[k][j];
}
}
}
}
但是这里我们要注意循环的嵌套顺序,如果把检查所有节点X放在最内层,那么结果将是不正确的,为什么呢?因为这样便过早的把i到j的最短路径确定下来了,而当后面存在更短的路径时,已经不再会更新了。具体来讲,这就是固定两端i,j,还是固定中间k的选择问题。这两个有什么区别呢。如果是固定两端,当k遍历完时,ij之间的最短距离就算完了,这对吗?很显然此时每个结点的最优值都还不确定呢,那结果就不一定对的,特别是算的越早的越不准。但如果我们把k固定,固定变化i,j,那么每一次都会把所有点经过k的点的最短距离算出来,当k算完,所有点的结果就算完了。这就是所有点对一个点的最小距离算完后,每个点都刷新一次,而前一种,每个点的刷新次数不一样,这公平吗?哈哈!
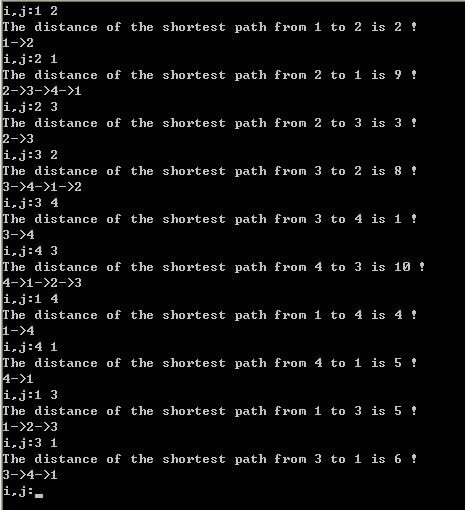
接下来就要看一看如何找出最短路径所行经的城市了,这里要用到另一个矩阵P,它的定义是这样的:p(ij)的值如果为p,就表示i到j的最短行经为i->p...->j,也就是说p是i到j的最短行径中的j之前的第一个城市。P矩阵的初值为p(ij)=j。有了这个矩阵之后,要找最短路径就轻而易举了。对于i到j而言找出p(ij),令为q,就知道了路径i->q->...->j;再去找p(qj),再去找p(qj),如果值为r,i到q的最短路径为q->r...->j;所以一再反复,到了某个p(tj)的值为j时,就表示t到j的最短路径为t->j,就会的到答案了,i到j的最短行径为i->q->r...->t->j。
但是,如何动态的回填P矩阵的值呢?回想一下,当d(ij)>d(ik)+d(kj)时,就要让i到j的最短路径改为走i->...->k->...->j这一条路,但是d(kj)的值是已知的,换句话说,就是k->...->j这条路是已知的,所以k->...->j这条路上j的上一个城市(即p(kj))也是已知的,当然,因为要改走i->...->k->...->j这一条路,j的上一个城市正好是p(kj)。所以一旦发现d(ij)>d(ik)+d(kj),就把p(kj)存入p(ij)。
可以这么想当d(ij)>d(ik)+d(kj)时,也就是说i->...->k->...->j,那么k应该在什么位置呢?我们知道path(i,j)一定由原先的值变化而来的,而且是由上一个path变化而来的,如果每一次变化都会造成i->k->...->j或i->...->k->j,这样的话,我们就可以递推得到我们所想要路径。那么如何才能这样,而不是i->...->k->...->j中间的任何一个呢?path(i,j)=path(?,?)呢?是path(i,k),还是path(k,j)?我们可以这么想,如果发生了d(ij)>d(ik)+d(kj)这么一个东西,抛开是不是最短的路径,但i,j,k之定通路,不仅是通路,而且,每次变化的路径是有一定的继承性的,因为它至少是经过第k点的最优路径。当k+1时,如果值没发生变化,则变化的是k~j而不是i~j,如果发生了变化了,说明上一个不是最佳的,需要调整。所以每次变化的一定是i->k->...->j或i->...->k->j。下面有一个例子说明:

现在分析2~1之间的最短路径。k=1,2时,2到1之间的路径依然是无穷,因为是它们本身的节点,但此时别其它点已经计算到1,2暂时的最佳路径,比如3~1。当k=3时,2~3的路径计算出来,同时3~1的之前就计算出来了,所以些Path(2,1)=3。当k=4的时候,3~1的最佳路径发生变化,但与2~1的最佳无关,除非能够计算出来2~4~1的路径更短。如果你仔细思考的话,会发现如果path(i,j)只变化一次的话,那它的路径就是i~k~j,至于k~j是多少,那个是后续的事,如果变化了多次,它依然是i~k~j,因为些算法只计算2个长度的路径,所以每次的k一定会挨着i。会不会发生i~k,和k~j同时发生呢,会!但如果i~k发生了变化,那么k~j原先就会失效,得重新寻找更新了,所以从不变的角度来讲,i~k这个过程始终不会发生变化,这样我们可以通过寻找i~k~j,k~v~j,....找到我们所需要的路径。所以只需要将path(i,j)=path(i,k)这样赋值就可以了,如果是path(i,j)=path(k,j),这就和刚才分析是反过来了,同时初值做一次翻转。
上面解决了,那么path如何赋初值呢?那就看k=1是啥情况喽,很明显,Path(i,1)=1,因为i~1~1嘛,所以有path(i,j)=j。这样我们就得到其C语言程序了,如下:
#define MAXLEN 10000
void initPath(int **path,int n)//初始化path
{
for(int i=0;i";//打印原点
int v=path[begin][end];//获得第一个路径顶点下标
while(v!=end)//如果路径顶点下标不是终点
{
cout<";//打印路径顶点
v=path[v][end];//获得下一个路径顶点下标
}
cout<
以上皆用到
#define MAXLEN 10000
4.参考资料:
http://developer.51cto.com/art/201403/433874.htm
http://www.cnblogs.com/biyeymyhjob/archive/2012/07/31/2615833.html
http://www.cnblogs.com/twjcnblog/archive/2011/09/07/2170306.html
你可能感兴趣的:(算法)