机器视觉技术原理解析及解决方案集锦
机器视觉就是用机器代替人眼来做测量和判断。机器视觉系统是指通过机器视觉产品(即图像摄取装置,分 CMOS 和CCD 两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。
食品行业机器视觉系统
概述
机器视觉(Machine vision)
机器视觉系统的特点是提高生产的柔性和自动化程度。在一些不适合于人工作业的危险工作环境或人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉;同时在大批量工业生产过程中,用人工视觉检查产品质量效率低且精度不高,用机器视觉检测方法可以大大提高生产效率和生产的自动化程度。而且机器视觉易于实现信息集成,是实现计算机集成制造的基础技术。正是由于机器视觉系统可以快速获取大量信息,而且易于自动处理,也易于同设计信息以及加工控制信息集成,因此,在现代自动化生产过程中,人们将机器视觉系统广泛地用于工况监视、成品检验和质量控制等领域。
基本构造
一个典型的工业机器视觉系统包括:光源、镜头、 相机(包括CCD 相机和COMS相机)、图像处理单元(或图像捕获卡)、图像处理软件、监视器、通讯 / 输入输出单元等。
系统可再分为:主端电脑(Host Computer)、影像撷取卡(Frame Grabber)与影像处理器、影像摄影机、CCT镜头、显微镜头、照明设备、Halogen光源、LED光源、高周波萤光灯源、闪光灯源、其他特殊光源、影像显示器、LC机构及控制系统、PLC、PC-Base控制器、精密桌台、伺服运动机台。
工作原理
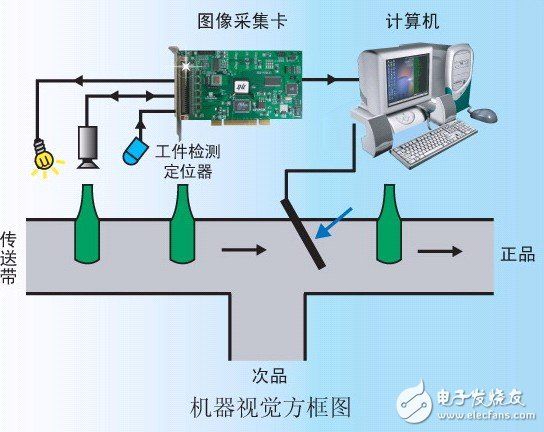
机器视觉检测系统采用CCD照相机将被检测 的目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号,图像处理系统对这些信号进行各种运算来抽取目标的特征,如面积、数量、位置、长度,再根据预设的允许度和其他条件输出结果,包括尺寸、角度、个数、合格 / 不合格、有 / 无等,实现自动识别功能。
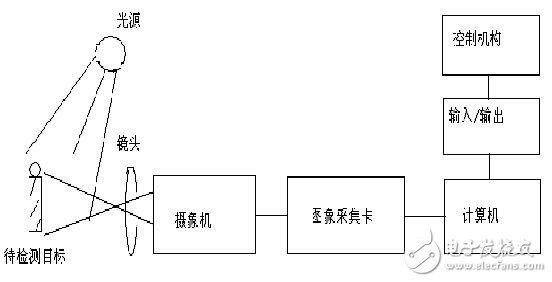
工作原理图
机器视觉系统的典型结构
照明
照明是影响机器视觉系统输入的重要因素,它直接影响输入数据的质量和应用效果。由于没有通用的机器视觉照明设备,所以针对每个特定的应用实例,要选择相应的照明装置,以达到最佳效果。光源可分为可见光和不可见光。常用的几种可见光源是白帜灯、日光灯、水银灯和钠光灯。可见光的缺点是光能不能保持稳定。如何使光能在一定的程度上保持稳定,是实用化过程中急需要解决的问题。另一方面,环境光有可能影响图像的质量,所以可采用加防护屏的方法来减少环境光的影响。照明系统按其照射方法可分为:背向照明、前向照明、结构光和频闪光照明等。其中,背向照明是被测物放在光源和摄像机之间,它的优点是能获得高对比度的图像。前向照明是光源和摄像机位于被测物的同侧,这种方式便于安装。结构光照明是将光栅或线光源等投射到被测物上,根据它们产生的畸变,解调出被测物的三维信息。频闪光照明是将高频率的光脉冲照射到物体上,摄像机拍摄要求与光源同步。
镜头
FOV(Field Of Vision)=所需分辨率*亚象素*相机尺寸/PRTM(零件测量公差比)镜头选择应注意:①焦距②目标高度 ③影像高度 ④放大倍数 ⑤影像至目标的距离 ⑥中心点 /节点 ⑦畸变
相机
按照不同标准可分为:标准分辨率数字相机和模拟相机等。要根据不同的实际应用场合选不同的相机和高分辨率相机:线扫描CCD和面阵CCD;单色相机和彩色相机。
图像采集卡
图像采集卡只是完整的机器视觉系统的一个部件,但是它扮演一个非常重要的角色。图像采集卡直接决定了摄像头的接口:黑白、彩色、模拟、数字等等。
比较典型的是PCI或AGP兼容的捕获卡,可以将图像迅速地传送到计算机存储器进行处理。有些采集卡有内置的多路开关。例如,可以连接8个不同的摄像机,然后告诉采集卡采用那一个相机抓拍到的信息。有些采集卡有内置的数字输入以触发采集卡进行捕捉,当采集卡抓拍图像时数字输出口就触发闸门。
视觉处理器
视觉处理器集采集卡与处理器于一体。以往计算机速度较慢时,采用视觉处理器加快视觉处理任务。现在由于采集卡可以快速传输图像到存储器,而且计算机也快多了,所以现在视觉处理器用的较少了。
应用领域
机器视觉的应用主要有检测和机器人视觉两个方面:
1. 检测:又可分为高精度定量检测(例如显微照片的细胞分类、机械零部件的尺寸和位置测量)和不用量器的定性或半定量检测(例如产品的外观检查、装配线上的零部件识别定位、缺陷性检测与装配完全性检测)。
2. 机器人视觉:用于指引机器人在大范围内的操作和行动,如从料斗送出的杂乱工件堆中拣取工件并按一定的方位放在传输带或其他设备上(即料斗拣取问题)。至于小范围内的操作和行动,还需要借助于触觉传感技术。
此外还有:(1)自动光学检查(2)人脸侦测(3)无人驾驶汽车
机器视觉特点
1.摄像机的拍照速度自动与被测物的速度相匹配,拍摄到理想的图像;
2.零件的尺寸范围为2.4mm到12mm,厚度可以不同;
3.系统根据操作者选择不同尺寸的工件,调用相应视觉程序进行尺寸检测,并输出结果;
4.针对不同尺寸的零件,排序装置和输送装置可以精确调整料道的宽度,使零件在固定路径上运动并进行视觉检测;
5.机器视觉系统分辨率达到1600×1200,动态检测精度可以达到0.02mm;
6.废品漏检率为0;
7.本系统可通过显示图像监视检测过程,也可通过界面显示的检测数据动态查看检测结果;
8.具有对错误工件及时准确发出剔除控制信号、剔除废品的功能;
9.系统能够自检其主要设备的状态是否正常,配有状态指示灯;同时能够设置系统维护人员、使用人员不同的操作权限;
10.实时显示检测画面,中文界面,可以浏览最近几次不合格品的图像,具有能够存储和实时察看错误工件图像的功能;
11.能生成错误结果信息文件,包含对应的错误图像,并能打印输出。
应用实例
1. 基于机器视觉的仪表板总成智能集成测试系统
EQ140-II汽车仪表板总成是我国某汽车公司生产的仪表产品,仪表板上安装有速度里程表、水温表、汽油表、电流表、信号报警灯等,其生产批量大,出厂前需要进行一次质量终检。检测项目包括:检测速度表等五个仪表指针的指示误差;检测24个信号报警灯和若干照明9灯是否损坏或漏装。一般采用人工目测方法检查,误差大,可靠性差,不能满足自动化生产的需要。基于机器视觉的智能集成测试系统,改变了这种现状,实现了对仪表板总成智能化、全自动、高精度、快速质量检测,克服了人工检测所造成的各种误差,大大提高了检测效率。
整个系统分为四个部分:为仪表板提供模拟信号源的集成化多路标准信号源、具有图像信息反馈定位的双坐标CNC系统、摄像机图像获取系统和主从机平行处理系统。
2. 金属板表面自动控伤系统
金属板如大型电力变压器线圈扁平线收音机朦胧皮等的表面质量都有很高的要求,但原始的采用人工目视或用百分表加控针的检测方法不仅易受主观因素的影响,而且可能会绘被测表面带来新的划伤。金属板表面自动探伤系统利用机器视觉技术对金属表面缺陷进行自动检查,在生产过程中高速、准确地进行检测,同时由于采用非接角式测量,避免了产生新划伤的可能。其工作原理图如图8-6所示;在此系统中,采用激光器作为光源,通过针孔滤波器滤除激光束周围的杂散光,扩束镜和准直镜使激光束变为平行光并以45度的入射角均匀照明被检查的金属板表面。金属板放在检验台上。检验台可在X、Y、Z三个方向上移动,摄像机采用TCD142D型2048线陈CCD,镜头采用普通照相机镜头。CCD接口电路采用单片机系统。主机PC机主要完成图像预处理及缺陷的分类或划痕的深度运算等,并可将检测到的缺陷或划痕图像在显示器上显示。CCD接口电路和PC机之间通过RS-232口进行双向通讯,结合异步A/D转换方式,构成人机交互式的数据采集与处理。
该系统主要利用线阵CCD的自扫描特性与被检查钢板X方向的移动相结合,取得金属板表面的三维图像信息。
3. 汽车车身检测系统
英国ROVER汽车公司800系列汽车车身轮廓尺寸精度的100%在线检测,是机器视觉系统用于工业检测中的一个较为典型的例子,该系统由62个测量单元组成,每个测量单元包括一台激光器和一个CCD摄像机,用以检测车身外壳上288个测量点。汽车车身置于测量框架下,通过软件校准车身的精确位置。
测量单元的校准将会影响检测精度,因而受到特别重视。每个激光器/摄像机单元均在离线状态下经过校准。同时还有一个在离线状态下用三坐标测量机校准过的校准装置,可对摄像顶进行在线校准。
检测系统以每40秒检测一个车身的速度,检测三种类型的车身。系统将检测结果与人、从CAD模型中撮出来的合格尺寸相比较,测量精度为±0.1mm。 ROVER的质量检测人员用该系统来判别关键部分的尺寸一致性,如车身整体外型、门、玻璃窗口等。实践证明,该系统是成功的,并将用于ROVER公司其它系统列汽车的车身检测。
4. 纸币印刷质量检测系统:该系统利用图像处理技术,通过对纸币生产流水线上的纸币20多项特征(号码、盲文、颜色、图案等)进行比较分析,检测纸币的质量,替代传统的人眼辨别的方法。
5. 智能交通管理系统:通过在交通要道放置摄像头,当有违章车辆(如闯红灯)时,摄像头将车辆的牌照拍摄下来,传输给中央管理系统,系统利用图像处理技术,对拍摄的图片进行分析,提取出车牌号,存储在数据库中,可以供管理人员进行检索。
6.金相分析:金相图象分析系统能对金属或其它材料的基体组织、杂质含量、组织成分等进行精确、客观地分析,为产品质量提供可靠的依据。
7. 医疗图像分析:血液细胞自动分类计数、染色体分析、癌症细胞识别等。
8. 瓶装啤酒生产流水线检测系统:可以检测啤酒是否达到标准的容量、啤酒标签是否完整
9. 大型工件平行度、垂直度测量仪:采用激光扫描与CCD探测系统的大型工件平行度、垂直度测量仪,它以稳定的准直激光束为测量基线,配以回转轴系,旋转五角标棱镜扫出互相平行或垂直的基准平面,将其与被测大型工件的各面进行比较。在加工或安装大型工件时,可用该认错器测量面间的平行度及垂直度。
10. 螺纹钢外形轮廓尺寸的探测器件:以频闪光作为照明光源,利用面陈和线陈CCD作为螺纹钢外形轮廓尺寸的探测器件,实现热轧螺纹钢几何参数在线测量的动态检测系统。
11.轴承实时监控:视觉技术实时监控轴承的负载和温度变化,消除过载和过热的危险。将传统上通过测量滚珠表面保证加工质量和安全操作的被动式测量变为主动式监控。
12. 金属表面的裂纹测量:用微波作为信号源,根据微波发生器发出不同波涛率的方波,测量金属表面的裂纹,微波的波的频率越高,可测的裂纹越狭小。
总之,类似的实用系统还有许多,这里就不一一叙述了。