陀螺 Allan 方差分析
在IMU选型时,需要重点关注陀螺的随机游走和零偏稳定性参数,这些是影响姿态精度的主要参数。
一般,芯片手册上给定的参数比较理想。需要在拿到硬件后,进行误差分析,多次测试看其性能。
陀螺噪声分析不适用ARMA模型,一般使用阿伦方差分析法对陀螺随机误差分析和建模。
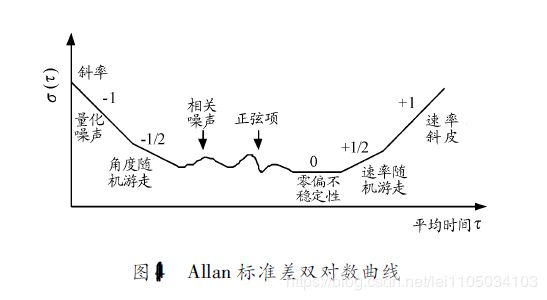
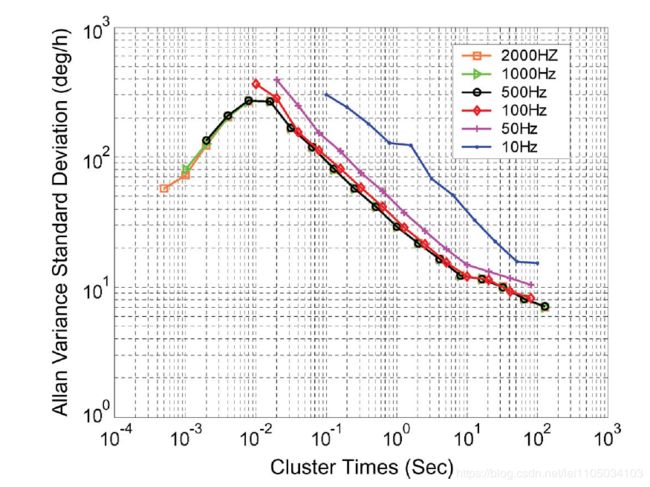
Allan方差法是一种时域分析技术,对实际静态条件下采集的惯性器件数据进行分析得到双对数曲线图,如图1, 根据不同拟合直线的斜率可以辨识不同的误差系数。
Allan方差计算方法
Step1:
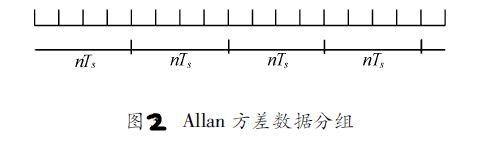
假设 IMU的采样周期是Ts,静态采集 N 个点。
将采样数据划分为包含不同数量采样点的子集 : τ(n)= nTs,n=1,2…N/2 , ,τ(n)为该子集的平均时间
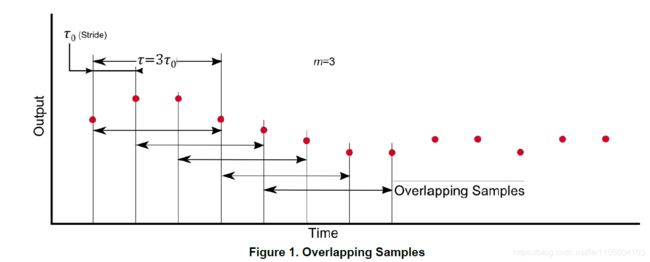
实际中,交叠式阿伦方差常用,下图是 n=3 时的分组情况。
Step2:
对于每一子集,计算第k组和第k+1组内各点的均值序列,再求取相邻两组的差值序列。最终求取所有差值的方差。
这样,就会得到n个在每一平均时间τ(n)对应的方差σ(n)。根据这n个点作图,可得到Allan标准差σ随平均时间τ变化的双对数曲线。
Allan方差反映了相邻两个采样段内平均频率差的起伏。它的最大优点在于对各类噪声的幂律谱项都是收敛的。
Allan方差分析误差与采样总数量和子集内采样点数量有关,总采样时间越长,数据量越大,Allan方差分析结果越准确;子集内数据量少时,平均时间短,Allan方差分析结果准确,而平均时间长时,分析结果差。
Step3:
通过曲线拟合 可以得到不同斜率下的误差项。主要有以下5大误差。
1. 量化噪声
量化噪声由AD转换过程中产生,是随机的,互不相关,是白噪声序列。
Allan标准差为 :![]()
在阿伦标准差相对T的双对数曲线上,斜率为-1, T=√3 处可以读出。
量化噪声的相关时间短,等效频带宽,而运载体的运动频率较低,因此量化噪声容易被低通滤波器过滤,不会成为惯性传感器的主要误差源。
2. 角度随机游走(ARW)
陀螺输出的角速率(加表的线加速度)白噪声,时间积分后为角度(线速度)随机游走。
Allan标准差为 :![]()
在阿伦标准差相对T的双对数曲线上,斜率为-1/2, T=1 处可以读出。
3. 零偏稳定性
零偏稳定性是指低频零偏抖动,由于内部电路随机波动引起。 代表零偏随时间变化的情况。
Allan标准差为 :![]()
在阿伦标准差相对T的双对数曲线上,底部的平坦区读出常值。芯片上一般取最小值, 但是常用的是 10s,或者100s处的值,即为平时所说的10s/100s平零偏稳定性。
4. 角速率随机游走
相关时间较长的一种噪声,是一种起源不确定的随机过程。
Allan标准差为 :![]()
在阿伦标准差相对T的双对数曲线上,斜率为+1/2, T=3 处可以读出。
5. 速率斜坡
漂移角速率斜坡是一种确定性系统误差,而不是随机项。
Allan标准差为:![]()
在阿伦标准差相对T的双对数曲线上,斜率为+1, T=√2处可以读出。
假设各种误差源统计独立,那总的艾伦方差为各种误差源之和,即
![]()
![]()
通过曲线拟合后,可以解得![]() 各项系数,然后可计算以上误差参数。
各项系数,然后可计算以上误差参数。
| 噪声类型 | 计算公式 | 陀螺单位 | 加表单位 |
| 量化噪声 |
arcsec(角秒) |
||
| 角度随机游走 | |||
| 零偏稳定性 | |||
| 角速率随机游走 | |||
| 速率斜坡 |
如果计算时 τ(n)平均时间是 s,陀螺输出是 °/h,A系数是相对 s 的,要转换成相对 h 的,需要按照T的幂次转换。 例如 速率斜坡 R * 3600,K*60等。如果陀螺输出是°/s,A系数需要先转换成°/h,再按上述转换。


当采样频率不一样时,阿伦方差不同。例如,采样频率越低,高频噪声会被抑制。低通滤波器的原理一致,截止频率越低,能抑制短周期噪声,如量化噪声等。但是采样频率一般需要大于IMU 3dB带宽频率的3~5倍。
阿伦方差中重要的的两个误差项是角度随机游走(用于设置Q阵)和 零偏稳定性(用于设置KF中一阶马氏过程的方差)。
芯片上一般给出的是常温下的阿伦方差参数,而实际应用中,最好做全温下的阿伦方差分析,因为载体环境温度会变。例如 某款芯片常温下零偏稳定性为3°/h,全温下为 30°/h 。
参考严恭敏老师关于阿伦方差的理解~链接: http://blog.sina.com.cn/s/blog_40edfdc90102y1ar.html
参考网友的matlab程序~链接: https://blog.csdn.net/u012325601/article/details/60882949