【滤波器学习笔记】一阶RC低通滤波
一阶RC低通滤波
从模拟到数字
本文整理自网络、《匠人手记》等书籍文章
- 模拟电路低通滤波时域、频域
- 软件低通滤波
典型电路
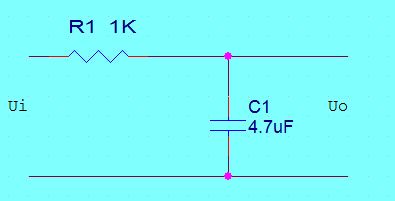
图1 典型RC电路
直流、交流、脉冲信号都可以用它
时域
电容电流:
基尔霍夫电压定律得:
Ui的单位是伏特,RC的单位为秒,τ=RC;
解得:
假设电容初始电压值为0
R=1000Ω
C=4.7uF
Ui=1V
t=0.0001~0.1s
τ=RC
Vc(τ)=0.632
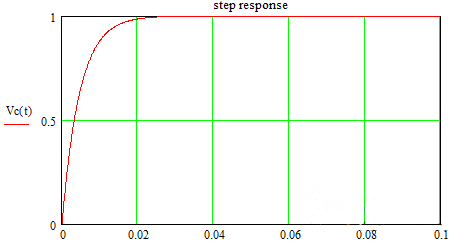
图2 一阶RC系统的阶跃响应曲线
频域
u1=Ui;u2=Uo;
以电容电压作为输出,电路的网络函数为:
令ωc=
ωc即为截止频率;
幅值和相角函数:
各变量取值:
R=1000Ω
C=4.7uF
|A(fc)|=0.707
θ(fc)=-45
f=0.001、1、…….100000
幅频和相频特性图:
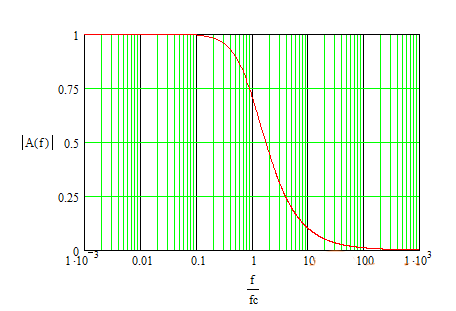
图3
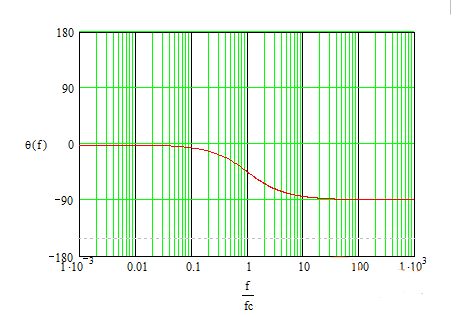
图4
幅频特性图的对数表示:
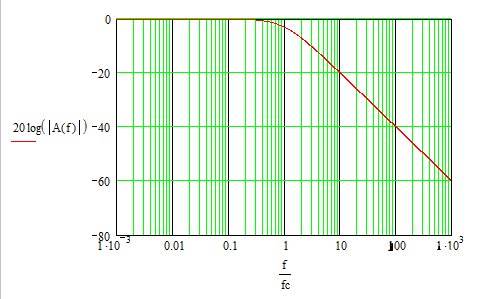
图5
-当ω<ωc时,幅值是平行于坐标的直线,基本无衰减;
-当ω>>ωc时,是斜率与-20dB/十倍频成比例的一条直线;
-当ω=ωc时,增益衰减至0.707,即-3dB,相位滞后45度,对应低通滤波器,该频率通常被称为截止频率。
缺点:
采用这种模拟滤波器抑制低频干扰时,要求滤波器有较大的时间常数和高精度的RC网络,增大时间常数要求增大R值,其漏电流也随之增大,从而降低了滤波效果;
软件上的一阶低通滤波
优点:
-采用数字滤波算法来实现动态的RC滤波,则能很好的克服模拟滤波器的缺点;
-在模拟常数要求较大的场合这种算法显得更为实用;
-其对于周期干扰有良好的抑制作用,
-比较节省RAM空间
缺点
-不足之处是带来了相位滞后,导致灵敏度低;
-同时它不能滤除频率高于采样频率的二分之一(称为奈奎斯特频率)的干扰(例如采样频率为100Hz,则它不能滤除50Hz以上的干扰信号)对于高于奈奎斯特频率的干扰信号,应该采用模拟滤波器。
-对没有乘、除法运算指令的单片机来说,程序运算工作量较大
基本滤波算法:
算法由来:
频率分析中一阶RC低通滤波在S域的传递函数:
通过z变换(方法很多,如一阶前向差分、双线性变换等这里用一阶后向差分法)
带入S域传递函数中:
推导转化为差分方程后可得:
通过Z变换把S域的传递函数转化成时域的差分方程,分析可得到
一阶RC数字滤波的基本算法
X为输入,Y为滤波后得输出值,则:
a为与RC值有关的一个参数,称为滤波系数,其值决定新采样值在本次滤波结果中所占的权重,其值通常远小于1,当采样间隔t足够小的时候,
-滤波系数越小,滤波结果越平稳,但是灵敏度越低;
-滤波系数越大,灵敏度越高,但是滤波结果越不稳定
-本次输出值主要取决于上次滤波输出值,当前采样值对本次输出贡献比较小,起到修正作用;
-截止频率:
例如:t=0.5s (f=2Hz), a=1/32
则fl=(1/32)/(2*3.14*0.5)=0.01Hz;
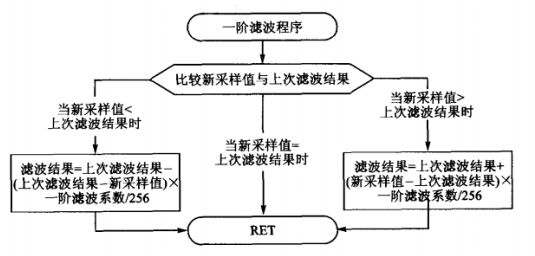
基本程序:
按照一阶滤波的基本原理与公式写程序,如下:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
程序初步优化
减少乘、除的运算次数以提高运算速度。
具体优化办法:
先将新采样值与上次滤波结果进行比较,然后根据比较采用不同的公式计算,这样程序的运算效率提高了一倍;
化解基本公式可得:
流程图:
程序:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
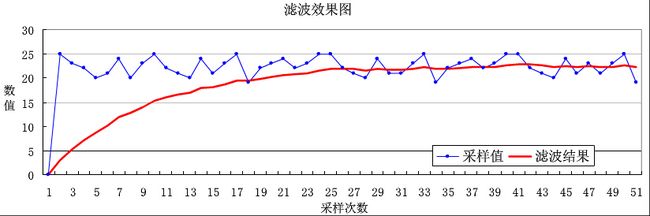
滤波分析:
当滤波系数为30的时候:
当滤波系数为128的时候:
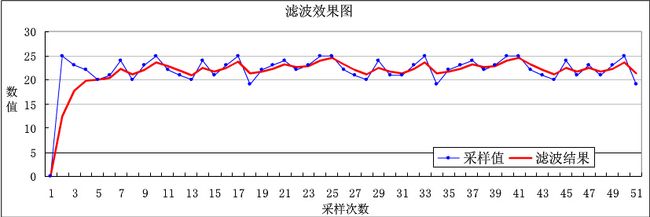
当滤波系数为200的时候:
可见滤波系数越小,滤波结果越平稳,但是灵敏度越低;滤波系数越大,灵敏度越高,但滤波结果也越不稳定;
不足
-灵敏度和平稳度间的矛盾
-小数舍弃带来的误差
比如:本次采样值=25,上次滤波结果=24,滤波系数=10;
根据算法得本次结果=24.0390625
在单片机中,很少采用浮点数,小数部分要么舍弃,要么进行四色五入。这样结果就变成24;假如采样值一直为25那么,结果永远是24;滤波结果和实际数据一直存在无法消除的误差。
严重时会导致,在数据采样数据稳定在某一数值上时,滤波结果曲线偏离实际值(即滤波结果在稳定时与实际结果存在较大误差);
改善办法
改变滤波系数,增大会导致平稳度降低,滤波系数太大滤波也就丧失意义;
将小数位参与计算,会给CPU带来沉重运算压力;
优化方法 —– 动态调整滤波系数
1、实现功能:
-当数据快速变化时,滤波结果能及时跟进,并且数据的变化越快,灵敏度应该越高(灵敏度优先原则)
-当数据趋于稳定,并在一个范围内振荡时,滤波结果能趋于平稳(平稳度优先原则)
-当数据稳定后,滤波结果能逼近并最终等于采样数据(消除因计算中小数带来的误差)
2、调整前判断:
-数据变化方向是否为同一个方向(如当连续两次的采样值都比其上次滤波结果大时,视为变化方向一致,否则视为不一致)
-数据变化是否较快(主要是判断采样值和上一次滤波结果之间的差值)
3、调整原则:
-当两次数据变化不一致时,说明有抖动,将滤波系数清零,忽略本次新采样值
-当数据持续向一个方向变化时,逐渐提高滤波系数,提供本次采样值得权;
-当数据变化较快(差值>消抖计数加速反应阈值)时,要加速提高滤波系数
调整滤波系数的程序流程:
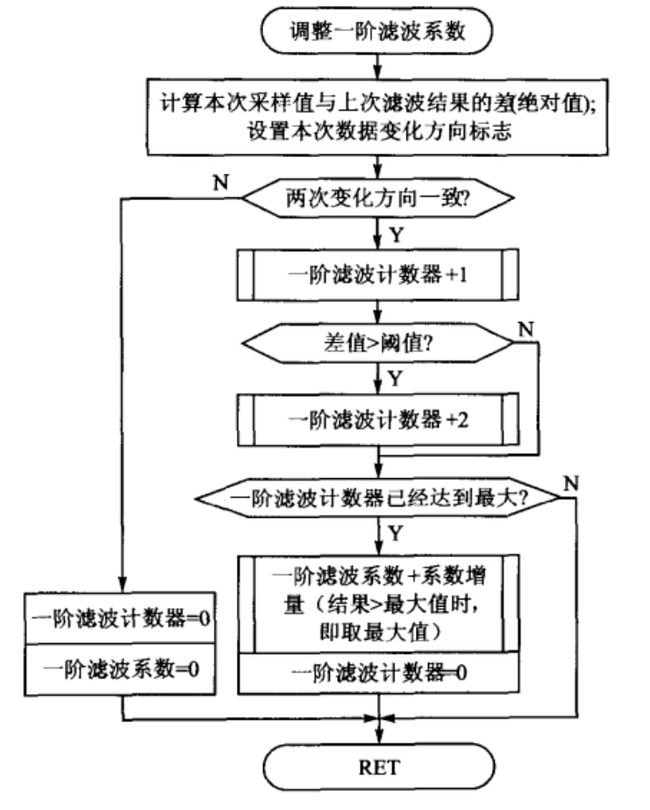
几个常量参数及其取值范围:
(不同的取值会影响滤波的灵敏度和稳定度)
1、消抖计数加速反应阈值,取值根据数据情况确定
2、消抖计数最大值,一般取值10;
3、滤波系数增量,一般取值范围为10~30
4、滤波系数最大值,一般取值255;

在调用一阶滤波程序前,先调用调整滤波系数程序,对系数进行即时调整
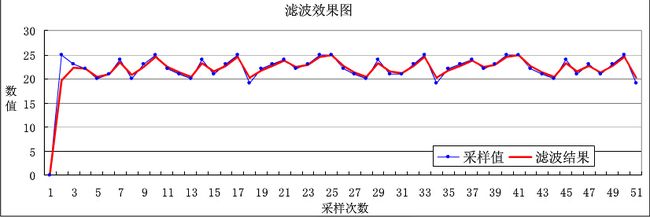
滤波效果
1、当采样数据偶然受到干扰,滤波结果中的干扰完全被滤除
2、当数据在一个范围内振荡时,滤波结果曲线非常平滑,几乎是一根直线
3、当采样数据发生真实的变化时,滤波结果也能比较及时地跟进
4、当采样数据趋于稳定时,滤波结果逐渐逼近并最终等于采样数据
-最终改进算法,兼顾了灵敏度和平稳度的要求;同时又不太消耗系统的RAM;
-只要合理调整几个常量,以使得算法更合适实际应用;
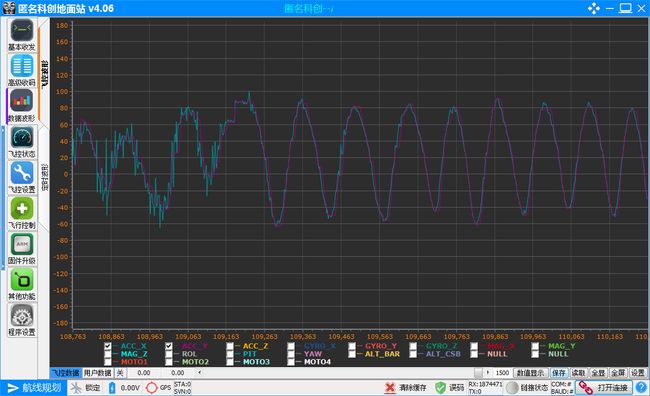
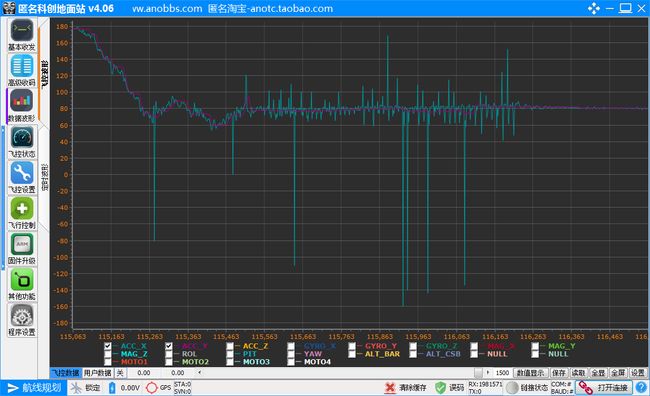
应用
下面是一个使用了动态调整滤波的例子:
程序:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
上几张图片:


-
-
修改程序中的阈值1和阈值2,可获得不同的滤波效果
————————————
再次声明:本文整理自网络、《匠人手记》等书籍文章,仅作为个人学习笔记