使用ZED Mini 相机运行ORB-SLAM2
一直想使用双目相机跑ORB-SLAM2,奈何没有双目相机,拿两个单目相机又觉得有点low。刚好另一个项目用到了zed mini双目相机,项目昨天也交差了,终于有时间可以去试试zed mini跑ORB-SLAM2。
直接上步骤:
一、先用zed mini 读取双目的图像。
1.按照zed mini官网上说的下载SDK 配置什么的。遇到的问题有:ttf-mscorefonts-installer 安装的时候有个times32.exe下载不了,我想这就是几个字体,也就是在gui上有用,我不使用gui就没理继续往下安装了。
2.之后对于各种提示,一路yes过去,最后SDK被安装在了/usr/local/zed,我顺手编译了一下depth sensing,没有让我失望果然不能运行。凡是用到gui界面的应该都不能运行,可是,我又不用gui,我只要能同时读左右相机的图像就可以了。
3.编译一下interfaces里的opencv,RGB图和深度图都可以显示,我不用深度图。
4.自己照着CMakeLists.txt和main.cpp里的东西,写了一段读RGB的代码。
SET(execName ZED_with_OpenCV)
CMAKE_MINIMUM_REQUIRED(VERSION 2.4)
PROJECT(${execName})
option(LINK_SHARED_ZED "Link with the ZED SDK shared executable" ON)
if (NOT LINK_SHARED_ZED AND MSVC)
message(FATAL_ERROR "LINK_SHARED_ZED OFF : ZED SDK static libraries not available on Windows")
endif()
if(COMMAND cmake_policy)
cmake_policy(SET CMP0003 OLD)
cmake_policy(SET CMP0015 OLD)
endif(COMMAND cmake_policy)
SET(EXECUTABLE_OUTPUT_PATH ".")
find_package(ZED 2 REQUIRED)
find_package(OpenCV REQUIRED)
find_package(CUDA ${ZED_CUDA_VERSION} EXACT REQUIRED)
IF(NOT WIN32)
add_definitions(-Wno-format-extra-args)
SET(SPECIAL_OS_LIBS "pthread" "X11")
ENDIF()
include_directories(${CUDA_INCLUDE_DIRS})
include_directories(${ZED_INCLUDE_DIRS})
include_directories(${OPENCV_INCLUDE_DIRS})
#include_directories(${CMAKE_CURRENT_SOURCE_DIR}/include)
link_directories(${ZED_LIBRARY_DIR})
link_directories(${OpenCV_LIBRARY_DIRS})
link_directories(${CUDA_LIBRARY_DIRS})
#FILE(GLOB_RECURSE SRC_FILES src/*.cpp)
#FILE(GLOB_RECURSE HDR_FILES include/*.hpp)
ADD_EXECUTABLE(${execName} ./src/main.cc)
add_definitions(-std=c++11 -g -O3)
if (LINK_SHARED_ZED)
SET(ZED_LIBS ${ZED_LIBRARIES} ${CUDA_CUDA_LIBRARY} ${CUDA_CUDART_LIBRARY} ${CUDA_NPP_LIBRARIES_ZED})
else()
SET(ZED_LIBS ${ZED_STATIC_LIBRARIES} ${CUDA_CUDA_LIBRARY} ${CUDA_LIBRARY})
endif()
TARGET_LINK_LIBRARIES(${execName} ${ZED_LIBS} ${OpenCV_LIBRARIES})这个CMakeLists.txt就把和深度图相关的都注释掉了。
main.cpp
///////////////////////////////////////////////////////////////////////////
//
// Copyright (c) 2019, STEREOLABS.
//
// All rights reserved.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
// "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
// LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
// OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
// SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
// LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
// DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
// THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
// (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
// OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
//
///////////////////////////////////////////////////////////////////////////
/***********************************************************************************************
** This sample demonstrates how to use the ZED SDK with OpenCV. **
** Depth and images are captured with the ZED SDK, converted to OpenCV format and displayed. **
***********************************************************************************************/
// ZED includes
#include
// OpenCV includes
#include
using namespace sl;
cv::Mat slMat2cvMat(Mat& input);
void printHelp();
int main(int argc, char **argv) {
// Create a ZED camera object
Camera zed;
// Set configuration parameters
InitParameters init_params;
init_params.camera_resolution = RESOLUTION_HD720;
if (argc > 1) init_params.svo_input_filename.set(argv[1]);
// Open the camera
ERROR_CODE err = zed.open(init_params);
if (err != SUCCESS) {
printf("%s\n", toString(err).c_str());
zed.close();
return 1; // Quit if an error occurred
}
// Display help in console
printHelp();
// Set runtime parameters after opening the camera
RuntimeParameters runtime_parameters;
runtime_parameters.sensing_mode = SENSING_MODE_STANDARD;
// Prepare new image size to retrieve half-resolution images
Resolution image_size = zed.getResolution();
int new_width = image_size.width ;
int new_height = image_size.height;
std::cout<())
// cv::Mat and sl::Mat will share a single memory structure
return cv::Mat(input.getHeight(), input.getWidth(), cv_type, input.getPtr(MEM_CPU));
}
/**
* This function displays help in console
**/
void printHelp() {
std::cout << " Press 's' to save Side by side images" << std::endl;
std::cout << " Press 'p' to save Point Cloud" << std::endl;
std::cout << " Press 'd' to save Depth image" << std::endl;
std::cout << " Press 'm' to switch Point Cloud format" << std::endl;
std::cout << " Press 'n' to switch Depth format" << std::endl;
} 这个代码很简单一看就都明白。
这样子Zed mini读图就没撒子问题了。
但是,不知道为啥子,重启了一下电脑驱动就坏了,应该是装什么GL之类的东西搞坏了,又装了一下驱动。
二、加到ORB-SLAM2里
1.新建了一个myslam_stereo.cc在Examples/Stereo/这个地方。
myslam_stereo.cc里这么写代码:
// 需要opencv
#include
// ORB-SLAM的系统接口
#include "System.h"
#include
#include // for time stamp
#include
#include
using namespace std;
using namespace sl;
cv::Mat slMat2cvMat(Mat& input);
// 参数文件与字典文件
// 如果你系统上的路径不同,请修改它
string parameterFile = "/home/meng/ORB_SLAM2-master/Examples/Stereo/Zed_stereo.yaml";
string vocFile = "/home/meng/ORB_SLAM2-master/Vocabulary/ORBvoc.txt";
int main(int argc, char **argv) {
cout<<"hello world";
// 声明 ORB-SLAM2 系统
ORB_SLAM2::System SLAM(vocFile, parameterFile, ORB_SLAM2::System::STEREO, true);
Camera zed;
// 记录系统时间
auto start = chrono::system_clock::now();
InitParameters init_params;
init_params.camera_resolution = RESOLUTION_HD720;
// Open the camera
ERROR_CODE err = zed.open(init_params);
if (err != SUCCESS) {
printf("%s\n", toString(err).c_str());
zed.close();
return 1; // Quit if an error occurred
}
// Set runtime parameters after opening the camera
RuntimeParameters runtime_parameters;
runtime_parameters.sensing_mode = SENSING_MODE_STANDARD;
// Prepare new image size to retrieve half-resolution images
Resolution image_size = zed.getResolution();
int new_width = image_size.width ;
int new_height = image_size.height;
// To share data between sl::Mat and cv::Mat, use slMat2cvMat()
// Only the headers and pointer to the sl::Mat are copied, not the data itself
Mat image_zed_left(new_width, new_height, MAT_TYPE_8U_C4);
Mat image_zed_right(new_width, new_height, MAT_TYPE_8U_C4);
while (1) {
// cv::Mat frame;
// cap >> frame; // 读取相机数据
if(zed.grab(runtime_parameters) == SUCCESS){
zed.retrieveImage(image_zed_left, VIEW_LEFT, MEM_CPU, new_width, new_height);
zed.retrieveImage(image_zed_right, VIEW_RIGHT, MEM_CPU, new_width, new_height);
}
cv::Mat image_ocv_left = slMat2cvMat(image_zed_left);
cv::Mat image_ocv_right = slMat2cvMat(image_zed_right);
auto now = chrono::system_clock::now();
auto timestamp = chrono::duration_cast(now - start);
SLAM.TrackStereo(image_ocv_left,image_ocv_right, double(timestamp.count())/1000.0);
}
return 0;
}
/**
* Conversion function between sl::Mat and cv::Mat
**/
cv::Mat slMat2cvMat(Mat& input) {
// Mapping between MAT_TYPE and CV_TYPE
int cv_type = -1;
switch (input.getDataType()) {
case MAT_TYPE_32F_C1: cv_type = CV_32FC1; break;
case MAT_TYPE_32F_C2: cv_type = CV_32FC2; break;
case MAT_TYPE_32F_C3: cv_type = CV_32FC3; break;
case MAT_TYPE_32F_C4: cv_type = CV_32FC4; break;
case MAT_TYPE_8U_C1: cv_type = CV_8UC1; break;
case MAT_TYPE_8U_C2: cv_type = CV_8UC2; break;
case MAT_TYPE_8U_C3: cv_type = CV_8UC3; break;
case MAT_TYPE_8U_C4: cv_type = CV_8UC4; break;
default: break;
}
// Since cv::Mat data requires a uchar* pointer, we get the uchar1 pointer from sl::Mat (getPtr())
// cv::Mat and sl::Mat will share a single memory structure
return cv::Mat(input.getHeight(), input.getWidth(), cv_type, input.getPtr(MEM_CPU));
}
代码不解释了,不难。2.编写CMakeLists.txt 对着之前的写就可以了,路径啥的注意点,链接opencv库该注释的注释掉,可执行文件名字给上。
cmake_minimum_required(VERSION 2.8)
project(ORB_SLAM2)
IF(NOT CMAKE_BUILD_TYPE)
SET(CMAKE_BUILD_TYPE Release)
ENDIF()
MESSAGE("Build type: " ${CMAKE_BUILD_TYPE})
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -Wall -O3")
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -Wall -O3")
# Check C++11 or C++0x support
include(CheckCXXCompilerFlag)
CHECK_CXX_COMPILER_FLAG("-std=c++11" COMPILER_SUPPORTS_CXX11)
CHECK_CXX_COMPILER_FLAG("-std=c++0x" COMPILER_SUPPORTS_CXX0X)
if(COMPILER_SUPPORTS_CXX11)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
add_definitions(-DCOMPILEDWITHC11)
message(STATUS "Using flag -std=c++11.")
elseif(COMPILER_SUPPORTS_CXX0X)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++0x")
add_definitions(-DCOMPILEDWITHC0X)
message(STATUS "Using flag -std=c++0x.")
else()
message(FATAL_ERROR "The compiler ${CMAKE_CXX_COMPILER} has no C++11 support. Please use a different C++ compiler.")
endif()
LIST(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake_modules)
find_package(OpenCV 3.0 QUIET)
if(NOT OpenCV_FOUND)
find_package(OpenCV 2.4.3 QUIET)
if(NOT OpenCV_FOUND)
message(FATAL_ERROR "OpenCV > 2.4.3 not found.")
endif()
endif()
find_package(Eigen3 3.1.0 REQUIRED)
find_package(Pangolin REQUIRED)
include_directories(
${PROJECT_SOURCE_DIR}
${PROJECT_SOURCE_DIR}/include
${EIGEN3_INCLUDE_DIR}
${Pangolin_INCLUDE_DIRS}
)
set(CMAKE_LIBRARY_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/lib)
add_library(${PROJECT_NAME} SHARED
src/System.cc
src/Tracking.cc
src/LocalMapping.cc
src/LoopClosing.cc
src/ORBextractor.cc
src/ORBmatcher.cc
src/FrameDrawer.cc
src/Converter.cc
src/MapPoint.cc
src/KeyFrame.cc
src/Map.cc
src/MapDrawer.cc
src/Optimizer.cc
src/PnPsolver.cc
src/Frame.cc
src/KeyFrameDatabase.cc
src/Sim3Solver.cc
src/Initializer.cc
src/Viewer.cc
)
target_link_libraries(${PROJECT_NAME}
${OpenCV_LIBS}
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${PROJECT_SOURCE_DIR}/Thirdparty/DBoW2/lib/libDBoW2.so
${PROJECT_SOURCE_DIR}/Thirdparty/g2o/lib/libg2o.so
)
#------------------------------------------------------------------------------------------------
#Add zed camera
option(LINK_SHARED_ZED "Link with the ZED SDK shared executable" ON)
if (NOT LINK_SHARED_ZED AND MSVC)
message(FATAL_ERROR "LINK_SHARED_ZED OFF : ZED SDK static libraries not available on Windows")
endif()
if(COMMAND cmake_policy)
cmake_policy(SET CMP0003 OLD)
cmake_policy(SET CMP0015 OLD)
endif(COMMAND cmake_policy)
#SET(EXECUTABLE_OUTPUT_PATH ".")
find_package(ZED 2 REQUIRED)
#find_package(OpenCV REQUIRED)
find_package(CUDA ${ZED_CUDA_VERSION} EXACT REQUIRED)
IF(NOT WIN32)
add_definitions(-Wno-format-extra-args)
SET(SPECIAL_OS_LIBS "pthread" "X11")
ENDIF()
include_directories(${CUDA_INCLUDE_DIRS})
include_directories(${ZED_INCLUDE_DIRS})
#include_directories(${OPENCV_INCLUDE_DIRS})
#include_directories(${CMAKE_CURRENT_SOURCE_DIR}/include)
link_directories(${ZED_LIBRARY_DIR})
#link_directories(${OpenCV_LIBRARY_DIRS})
link_directories(${CUDA_LIBRARY_DIRS})
#FILE(GLOB_RECURSE SRC_FILES src/*.cpp)
#FILE(GLOB_RECURSE HDR_FILES include/*.hpp)
#ADD_EXECUTABLE(${execName} ./src/main.cc)
#add_definitions(-std=c++11 -g -O3)
if (LINK_SHARED_ZED)
SET(ZED_LIBS ${ZED_LIBRARIES} ${CUDA_CUDA_LIBRARY} ${CUDA_CUDART_LIBRARY} ${CUDA_NPP_LIBRARIES_ZED})
else()
SET(ZED_LIBS ${ZED_STATIC_LIBRARIES} ${CUDA_CUDA_LIBRARY} ${CUDA_LIBRARY})
endif()
#TARGET_LINK_LIBRARIES(${execName} ${ZED_LIBS} ${OpenCV_LIBRARIES})
#---------------------------------------------------------------------------------------
# Build examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/RGB-D)
add_executable(rgbd_tum
Examples/RGB-D/rgbd_tum.cc)
target_link_libraries(rgbd_tum ${PROJECT_NAME})
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Stereo)
add_executable(stereo_kitti
Examples/Stereo/stereo_kitti.cc)
target_link_libraries(stereo_kitti ${PROJECT_NAME})
add_executable(stereo_euroc
Examples/Stereo/stereo_euroc.cc)
target_link_libraries(stereo_euroc ${PROJECT_NAME})
add_executable(myslam_stereo
Examples/Stereo/myslam_stereo.cc)
target_link_libraries(myslam_stereo ${PROJECT_NAME} ${ZED_LIBS})
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Monocular)
add_executable(mono_tum
Examples/Monocular/mono_tum.cc)
target_link_libraries(mono_tum ${PROJECT_NAME})
add_executable(mono_kitti
Examples/Monocular/mono_kitti.cc)
target_link_libraries(mono_kitti ${PROJECT_NAME})
add_executable(mono_euroc
Examples/Monocular/mono_euroc.cc)
target_link_libraries(mono_euroc ${PROJECT_NAME})
add_executable(myslam
Examples/Monocular/myslam.cc)
target_link_libraries(myslam ${PROJECT_NAME} ${ZED_LIBS})
注意,我之前用单目摄像头跑过,单目的在CMakeLists.txt最后几行,可以删掉。
三、写好yaml文件,复制Stereo里的KITT03的yaml文件,起个帅气的名字myslam_zed.yaml.
从usr/local/zed/setting找到你的相机的配置文件,SNXXXXXX.conf,简单易懂,填到myslam_zed.yaml里,HD是720P分辨率下的内参,对于Camera.bf参数 找到SNXXXXXX.conf里的Baseline参数 Camera.bf=fx*baseline/1000,为啥除以1000,因为这个conf里用的是毫米,yaml里用的是米。
想一下怎么可能如此的顺利,跑代码怎么会如此的顺利。运行不了几下子就报错崩溃,什么framebuffer with request attributes blabla...什么的错误,复制粘贴到百度,查了查应该还是GL的问题,看了对着一个解决方案试了一下:
删除掉ORBSLAM的cmakelists中的 -march=native 以及 g2o 的cmakelists中的-march=native
重新执行ORBSLAM目录下的./build.sh 后就可以正常跑了
转自:https://blog.csdn.net/weixin_42656998/article/details/99855639
试了一下,虽然还是会报错,可是程序不崩溃了,不管了,继续走。
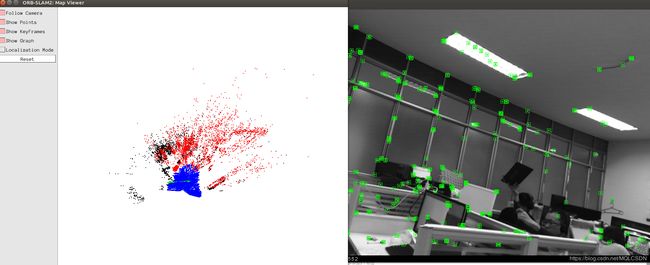
可以完美运行了,双目比单目效果好多了,纵享丝滑。
完美,告辞。